
Fターム[3D246GB24]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | 路面状況対応 (331) | 悪路、凹凸 (22)
Fターム[3D246GB24]に分類される特許
1 - 20 / 22
悪路判定装置
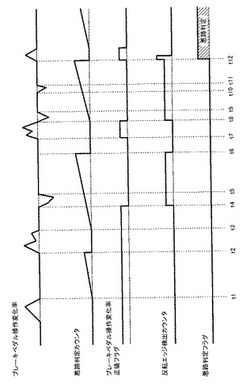
【課題】容易且つ正確に車両が悪路を走行しているか否かを判定する。
【解決手段】悪路判定装置は、車両におけるブレーキペダルの操作変化率を検出する変化率検出手段と、ブレーキペダルの操作変化率の正負反転回数を検出する反転回数検出手段と、ブレーキペダルの操作変化率の正負反転回数が所定値以上になった場合に、車両が悪路を走行していると判定する判定手段とを備える。
(もっと読む)
車両の制駆動力制御装置及び制駆動力制御方法

【課題】段差を通過して間もない位置に車両を停止する必要があっても、急な速度変化が発生することを抑制可能とすることを目的とする。
【解決手段】車両の制動力及び駆動力を制御して、取得した目標位置に車両を誘導または駐車する車両の制駆動力制御する際に、段差を通過する際に生じる目標位置に対する車両の相対速度の変動に応じて駆動力指令値を増大する。但し、上記段差を乗り越えるために、当該段差に接触した車輪の上方への変位である車輪の浮き上がりと判定すると、上記付加駆動力分の指令値が小さくなるように、上記駆動力指令値の上昇を抑制する。そして、駆動力指令値の抑制中に制動指令を制動装置に出力する。
(もっと読む)
車両の走行支援装置及び車両の走行支援方法
【課題】降車している運転手が車両を押し歩きする場合に、該押し歩きを支援することができる車両の走行支援装置及び車両の走行支援方法を提供する。
【解決手段】自動二輪車両の制御装置は、自動二輪車両の停車中に運転手が降車していると判定された第1のタイミングt1後に、該判定結果が維持された状態で自動二輪車両の移動開始が検知された場合(第3のタイミングt3)、車載のエンジンのエンジン回転数NEに基づく駆動力を駆動輪に伝達させる支援制御を行う。
(もっと読む)
段差乗り上げ判定装置
【課題】車輪の段差乗り上げの完了時点を高精度に判定することができる段差乗り上げ判定装置を提供する。
【解決手段】段差乗り上げ判定装置1は、4つの車輪の回転速度を検出する車輪速センサ7a〜7dと、トランスミッション4の出力軸の回転数を検出するT/M出力回転数センサ8と、段差乗り上げ判定ECU10とを備えている。段差乗り上げ判定ECU10は、車輪が段差を乗り上げ中であると判定されると、車輪速センサ7a〜7d及びT/M出力回転数センサ8の検出値に基づいて、全ての車輪の車輪速がゼロでなく且つトランスミッション4の出力軸の回転数がゼロでないかどうかを判断し、この条件が満たされたときは、車輪の段差乗り上げが完了したと判定する。
(もっと読む)
ブレーキ制御装置
【課題】大きな車両挙動に際し、その挙動抑制を図ることができるブレーキ制御装置を提供する。
【解決手段】車体の前部が上がるピッチ挙動が大きくなり、変形ピッチ角速度α・dθ/dtが所定値j01以下になって、挙動制御用制動信号算出回路14が出力する挙動制御用制動信号Fが目標制動力信号Kとしてアクチュエータ17に入力されると、前輪用のブレーキ手段が挙動制御用制動信号Fに応じた制動力を発生する。これにより、車体には前方方向の荷重移動が生じ、前記ピッチ挙動を抑制する。ピッチ運動の抑制を、ショックアブソーバの作動により行なうのではなく、車輪を制動することにより行なうので、仮にショックアブソーバがフルストロークし、ショックアブソーバによってはピッチ運動の抑制が困難な状況となる大きなピッチ挙動にも対応して、その大きなピッチ挙動の抑制を果たすことができる。
(もっと読む)
ブレーキ制御装置
【課題】悪路走行時であってもABS制御の誤作動を抑制可能なブレーキ制御装置を提供すること。
【解決手段】ABSコントロールユニットECUは、車輪速センサの出力値に基づいて車輪の加減速度を算出し、車輪加減速度算出部、即ち悪路レベル算出部は算出された車輪加減速度の所定レベル以上の周波数領域の加算値に基づいて悪路レベルを算出する。よって、簡素な構成で悪路レベルを算出することができる。また、閾値調整部は、算出された悪路レベルが大きいほどスリップ率閾値を大きくする。よって、悪路レベルに応じた適切なスリップ率を得ることができる。
(もっと読む)
走行支援装置
【課題】障害物までの距離を精度良く検出し、適切な停車位置の案内を行うことができる走行支援装置を提供する。
【解決手段】振動センサ10によって検出された実際の振動パターンと、記憶部33に予め記憶された規定パターンとが一致するか否かを振動パターン判断部31が判断する。振動パターン判断部31によって、振動パターンと規定パターンとが一致すると判断された場合には、車両100の走行路上に輪留め300が存在するものとして、報知判断部34がスピーカ40を通じて輪留め300の存在を報知する。これにより、走行路500から入力される実際の振動パターンに基づいて、輪留め300の存在を正確に検出することができ、車両100の運転者に対して、適切な停車位置の報知を行うことが可能となる。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】悪路などでのアンチロックブレーキ制御の誤作動防止と、旋回中の運転フィーリングの向上を両立させる。
【解決手段】各車輪のスリップ量の大小に関する計算値に基づき車輪ブレーキの液圧を制御する車両用ブレーキ液圧制御装置である。この装置は、前記計算値を、スリップ量が小さくなる方に換算して算出する第1の演算部(第1スリップ率演算部21)と、換算を行わずに算出する第2の演算部(第2スリップ率演算部22)と、第1の演算部が算出した計算値が第1の閾値を超えない場合においても、ヨーレイト偏差ΔYがヨーレイト偏差閾値を超え、かつ、第2の演算部が算出した計算値が第2の閾値を超えた場合には車輪ブレーキの減圧制御を実行する圧力制御部(圧力制御判定部24、弁駆動部25)を有する。
(もっと読む)
路外逸脱防止装置
【課題】 路外逸脱防止のための制御に対する効果を十分に得ると共に、路外逸脱防止のための制御の中止に対して運転者に違和感を与えることがない。
【解決手段】 コントローラ1が、走行状態から自車両が走行車線から逸脱するか否かを判断すると共に、自車両が走行する道路上の車線端又は道路境界に設けられ車両に振動を付与するランブルストリップが検出された場合に、車線外への逸脱を回避するように車両システム6により制駆動力を発生させる路外逸脱防止動作を制御する。コントローラ1は、運転者の操作に基づいてベース閾値を路外逸脱防止動作が中止されやすくする低方向に補正し、操作量が閾値を超えた場合に、車両システム6による路外逸脱防止動作を終了させる。
(もっと読む)
車両制御装置
【課題】スタック状態からの脱出を容易にする車両制御装置を提供すること。
【解決手段】ドライバによって切り換え可能な悪路制御モード切換スイッチによって、悪路制御モードに切り換えられると悪路制御を実行する悪路制御手段を設けた。悪路制御手段は、車輪の所定の制動力を与える制動力付与手段と、前記制動力付与手段により制動力が付与されている車輪に対して所定の駆動力を与える駆動力付与手段と、を備えたことを特徴とする車両制御装置。
(もっと読む)
車両および車両の制御方法
【課題】動力源から車輪に動力を伝達するための動力伝達機構に過大なトルクが発生することを回避する。
【解決手段】ECU150は、車両100が波状路を走行中に急制動が実行された場合には、ブレーキ油圧が閾値以下となるようにブレーキ油圧を制御する。ブレーキアクチュエータ120はECU150の制御により油圧ブレーキ30,32,50,52に供給する油圧を制御する。好ましくは、ECU150は、ブレーキ油圧が、アンチロックブレーキ制御の実行時における油圧の実効値よりも大きくなるようにブレーキ油圧を制御する。これにより、モータの動力を車輪に伝達する動力伝達機構(伝達部材15,41、減速機22,42、車軸28,48)に過大なトルクが発生することを回避できる。
(もっと読む)
車両制動装置
【課題】路面状況に応じた制動に係わる制御を最適に実行することができる車両制動装置を提供すること。
【解決手段】本発明による車両制動装置1は、スリップ率が目標スリップ率よりも大きい場合に車輪のロックを抑制するロック抑制手段7bと、車体速度が許可最低車体速度以上であり車体減速度が開始許可減速度以上である場合に車両のピッチングを抑制するピッチング抑制手段7cと、車両が砂地路を走行しているか否かを判定する砂地路判定手段7dと、砂地路判定手段7dにより車両が砂地路を走行していると判定される場合に、目標スリップ率を大きくするとともに、許可最低車体速度及び開始許可減速度を小さくする変更手段7eを備えることを特徴とする。
(もっと読む)
路面摩擦係数推定装置およびアンチスキッド制御装置
【課題】M/C圧センサの検出結果を用いて路面摩擦力推定を行う場合において、より正確な路面摩擦力推定が行えるようにする。
【解決手段】M/C圧センサ80の検出信号に基づいて演算した路面摩擦力推定値(1)を基本的には使用しつつ、車輪速度センサ81〜84の検出信号に基づいて演算した路面摩擦力推定値(2)と比較することで、路面摩擦力推定値(1)を補正する。具体的には、M/C圧センサ値に基づいて演算される推定W/C圧値を補正することにより、路面摩擦力推定値(1)を補正する。これにより、ABS制御中に路面摩擦力推定値(1)が正確な値でなくなるような状態になったときにも、路面摩擦力推定値(1)を路面摩擦力推定値(2)に基づいて補正できる。したがって、M/C圧センサ80の検出結果を用いて路面摩擦力推定を行う場合において、より正確な路面摩擦力推定を行うことが可能となる。
(もっと読む)
車両重量推定方法および装置ならびに車両走行制御装置
【課題】車両が走行している路面の勾配のいかんを問わず、簡単にかつ精度良く車両重量を推定し得るようにする。
【解決手段】車両が、設定速度以上で惰性走行しており(S1,S2の判定がYES)、かつ、通常路を直進しているときに(S3,S4の判定がYES)、その車両の前後方向の減速度を加速度センサにより検出(S5)し、その検出した減速度である検出減速度に基づいて車両重量を複数段階で推定する(S6〜S10)。路面の勾配いかんを問わず車両重量を精度良く推定することができる。
(もっと読む)
車速制御装置
【課題】
路面の凹凸による振動が車両のばね上と共振することを確実に回避して、車両の乗り心地性能の向上が図れる車速制御装置を提供すること。
【解決手段】
車両の車速を制御する車速制御装置1であって、路面の凹凸による振動が車両のばね上と共振することを避けるように車速を増減して車速制御する。これにより、車両のばね上共振が避けられるため、車両の乗り心地性能の向上が図れる。
(もっと読む)
車両の制動制御装置、及び車両の制動制御方法
【課題】制動装置全体の消費電力の増加を抑制しつつ、ブレーキロータ及びブレーキパッドの偏摩耗の発生を抑制できる車両の制動制御装置、及び車両の制動制御方法を提供する。
【解決手段】ECUは、路面判定処理を実行して車両の走行する路面の悪路指数を演算する(ステップS10)。そして、ECUは、ステップS10にて演算した悪路指数に基づき、車両の走行する路面が凹凸度合の比較的大きな悪路から凹凸度合の比較的小さな良路に変わったか否かを判定する(ステップS11)。この判定結果が肯定判定である場合、ECUは、路面が悪路から良路に変わったと判断し、モータを駆動させてホイールシリンダ内にブレーキ液を流入させる(ステップS13)。すると、各ブレーキパッドがブレーキロータに摺接する結果、ブレーキロータの各ブレーキパッドに対する傾斜が解消される。
(もっと読む)
アンチスキッド制御装置
【課題】 ブレーキ非操作時におけるアンチスキッド制御の誤介入を防止し、運転者に与える違和感を低減したアンチスキッド制御装置を提供する。
【解決手段】 運転者のブレーキ操作を検出するブレーキスイッチと、モータ停止時の逆起電圧を検出する電圧検出手段とを有し、アンチスキッド制御手段は、ブレーキスイッチのOFF時にアンチスキッド制御を実行する場合、モータをONからOFFに切り換え、この切り換え時における逆起電圧が所定のしきい値よりも大きい場合、モータおよびソレノイドバルブの作動を停止するアンチスキッド誤介入防止制御を実行することとした。
(もっと読む)
ブレーキ装置
【課題】ブレーキ装置において、ノックバックによる応答性の低下を防止しつつ、ディスクロータ及びブレーキパッドの偏摩耗を防止する。
【解決手段】通常は、ブレーキペダル19の操作によってマスタシリンダ4で発生した液圧をディスクブレーキ2に直接供給して制動力を発生させる。また、コントローラ14によって液圧ポンプモータ7を作動させてディスクブレーキ2に液圧を供給することによって制動力を発生させることができる。急旋回等によってノックバックが生じた場合、ピストン16の後退を許容することにより、ブレーキパッド17及びディスクロータ18の偏摩耗を防止する。その後、ノックバックの要因が解除されたとき、コントローラ14によって液圧ポンプモータ7を作動させ、ピストン16を前進させてパッドクリアランスを調整することにより、応答性の低下を防止する。
(もっと読む)
車線逸脱防止装置及び車線逸脱防止方法
【課題】車両の走行車線に対する逸脱傾向の度合いが小さくても、車両の逸脱をより防止可能とする。
【解決手段】走行車線に対する車両の逸脱傾向の度合いに応じたヨーモーメントM1を算出し、その算出したヨーモーメントM1に応じた目標ヨーモーメントMsを車両に付与する。その際に、算出したヨーモーメントM1が最小目標ヨーモーメントMmin以下の場合には、時間と共に増加する最小制御ヨーモーメントMsmを使用する。この最小制御ヨーモーメントMsmの初期値Msm0は、最小目標ヨーモーメントMminよりも小さい値である。
(もっと読む)
車両制御装置
【課題】車両状態に応じた適切な車両制御を実現する。
【解決手段】ECUにおいて、路面状態判定部は、車両の走行路が通常路か砂地路かを判定する。スリップ率取得部は、車両が通常路を走行していると判定された場合に、目標スリップ率として第1スリップ率を設定し、車両が砂地路を走行していると判定された場合に、目標スリップ率として第3スリップ率を設定する。路面状態判定部は、オフロードスイッチがオンにされている場合であって、推定加速度Geおよび実加速度Gxが直線L1および直線L2の間の値となる場合、車両がプレ砂地路を走行していると判定する。スリップ率取得部は、車両がプレ砂地路を走行していると判定された場合、第1スリップ率と第3スリップ率の中間の値である第2スリップ率に目標スリップ率を設定する。
(もっと読む)
1 - 20 / 22
[ Back to top ]