
Fターム[3D246HA81]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車体状態 (4,109) | ヨーレート (774)
Fターム[3D246HA81]に分類される特許
761 - 774 / 774
静的タイヤ・データを利用した車両安定性制御
車両の安定性を制御するシステムおよび方法は、電子制御ユニット(14)によって受信される静的タイヤ・データに少なくとも部分的に基づいて車両安定性制御サブシステム(16、18、20、21)を制御する電子制御システム(12)を含む。  (もっと読む)
(もっと読む)
横力係数に基づいた車両の走行安定化のための安定化装置及び方法
本発明は車両(10)の操舵される車輪(12,13)の舵角(δ)を制御するための操舵手段(9)と、車両(10)の走行安定化のために前記操舵手段(9)を制御する安定化手段(61)とを有している、車両(10)の走行安定化のための安定化装置に関する。本発明によれば、前記安定化手段(61)が、操舵される車輪(12,13)の少なくとも1つの横力係数(μs)に依存して、車両(10)を安定化させる舵角(δ)設定のために操舵手段(9)を駆動制御し、前記安定化手段(61)は、操舵される車輪(12,13)のスリップ角(α)を、横力係数(μs)がその最大の領域(M1,M2)を実質的に上回らないように設定していることを特徴としている。  (もっと読む)
(もっと読む)
妨害物をかわす際に衝突を回避するおよび/または衝突の結果を軽くするための方法および装置
車両を妨害物に対してかわす際に衝突を回避しおよび/または衝突結果を軽くするための方法および装置が提案され、その際少なくとも1つの周辺センサを用いて少なくとも1つの妨害物(3)が識別されかつ妨害物のデータが求められる。更に妨害物のデータ並びに車両のデータに基づいて、妨害物をかわす過程を支援するのに有利な車両減速度が求められかつ車両が相応に減速される。  (もっと読む)
(もっと読む)
車両の走行動特性制御装置及び方法
この発明は、トルク配分機器内でヨーイングトルク要求に応じて算出することが可能な制動トルクを車両の少なくとも一つの車輪ブレーキに設定することが可能なブレーキ用アクチュエーターを有する電子制動システムと、臨界的な走行状態の発生時に作動させることが可能な第一の制御ユニットであって、第一のヨーイングトルク要求を走行動特性制御にもとづき算出することが可能である第一の制御ユニットとを備えた、車両の走行動特性を制御する装置に関する。この装置は、管理機器(12)が、臨界未満の走行状態の発生時に作動させることが可能な第二の制御ユニットを有し、この第二の制御ユニットを用いて、第二のヨーイングトルク要求(R:D_GM)を走行動特性制御にもとづき算出することが可能であり、この第二のヨーイングトルク要求(R:D_GM)をトルク配分機器(20)に伝えることが可能であることと、第一の制御ユニット(4)が動作している状態では、第二の制御ユニットを停止させるための信号(I:EBS_Status;R:D_GM;R:[S1,S2,...])を電子制動システム(2)から管理機器(12)に伝えることが可能であることとを特徴とする。更に、この発明は、車両の走行動特性を制御する方法に関する。  (もっと読む)
(もっと読む)
非対称なブレーキングのグリップ力状態における自動車の後輪のブレーキング制御方法
本発明は、少なくとも4つの操舵可能な車輪(103〜106)を有する自動車の後輪のブレーキング制御方法に関する。本発明の自動車の後輪のブレーキング制御方法は、非対称なブレーキングのグリップ力状態の存在を検出し、右の後輪と左の後輪との間の最大ブレーキング圧力差の形のブレーキング圧力設定値を、自動車の瞬間的な速度と前輪の操舵角との関数として決定し、非対称なブレーキングのグリップ力状態が存在する場合には、自動車の不安定を修正するために、上記のブレーキング圧力設定値を、後輪のブレーキングアクチュエータへ伝達するステップを含む。本発明は、自動車の後輪のブレーキング制御方法を実行するブレーキング制御装置にも関する。  (もっと読む)
(もっと読む)
非対称なブレーキのグリップ力状態における自動車の後輪の操舵制御方法
本発明の、少なくとも4つの操舵可能な車輪を有する自動車の後輪の操舵制御方法は、非対称なブレーキのグリップ力状態の存在を検出し、自動車の縦方向の瞬間的な速度(212)の値と、前輪の操舵角(214)の値とに基づいて、第1の中間後輪操舵角設定値(218)を決定し、前の後輪操舵角設定値(215)の関数として、自動車のヨーレート(213)の擾乱(217)を推定し、該擾乱の関数として、第2の中間後輪操舵角設定値(219)を決定し、第1の中間後輪操舵角設定値(218)を、第2の中間後輪操舵角設定値(219)によって修正することによって、現在の後輪操舵角設定値(220)を決定し、現在の後輪操舵角設定値(220)を、後輪の少なくとも1つの操舵アクチュエータ(120)へ伝達するステップを含む。  (もっと読む)
(もっと読む)
電子的に制御可能なディファレンシャルロック機構のロックレベルを制御するための方法及び装置
この発明は、車両の駆動車軸における電子的に制御可能なディファレンシャルロック機構のロックレベルを制御するための方法に関する。この発明による方法は、駆動車軸の駆動輪が走行動特性コントローラによって制御される形で制動されているか否かを調査することと、駆動車軸の駆動輪が走行動特性コントローラによって制御される形で制動されていることが確認された場合に、ディファレンシャルロック機構をゼロのロックレベルに設定することとを特徴とする。走行動特性コントローラがブレーキ介入を行っていない時に車両がオーバーステアする場合、有利には、ゼロと異なるロックレベルを設定する。更に、この発明は、この方法を実施するのに適した装置に関する。  (もっと読む)
(もっと読む)
自動車の横方向転倒の回避方法および装置

【課題】全体走行状況に適合された制御が可能となる、自動車の横方向の転倒を回避する方法および装置を提供する。
【解決手段】自動車の横方向転倒の回避方法において、有限数の事前定義走行状態が特定され、車両が現在事前定義走行状態のいずれに存在するかが決定され、この場合、決定された事前定義走行状態は、センサ信号の関数であり、並びに車両が最後にそこに存在した、その事前定義走行状態の関数であり、また現在存在する事前定義走行状態の関数として、転倒を回避するために少なくとも1つのブレーキ係合が実行される。
(もっと読む)
トレーラが横揺れしているときの自動車のドライバの支援方法および装置

【課題】限界走行状況において車両を安定化させるときにドライバを支援し、誤ったブレーキ係合を回避させる、トレーラが横揺れしているときの自動車のドライバを支援する方法および装置を提供する。
【解決手段】横揺れしているトレーラを連結している車両は、第1の状態(1)において、少なくとも1つの車両状態変数(ay、vGi)の評価によりトレーラ振動が評価され、第2の状態(2)において、限界振動が検出されたとき、ドライバにブレーキ操作を命令するために、ドライバに警告が出力され、ドライバがブレーキ操作を開始した場合、ブレーキ過程において、ドライバは、車両ブレーキが自動的に操作されることにより支援され、この場合、ブレーキ圧力(Pso)が設定され、このブレーキ圧力(Pso)により最適な車両の減速が達成される。
(もっと読む)
車両を安定させるための装置及び方法
本発明は車両の横方向の運動を表す、横方向の運動変数の実際値を決定するために備えられた検出装置(10)を含み、横方向の運動変数のための目標値を決定し、横方向の運動の目標値が決定されたしきい値を超えた場合に、所定の安定条件に従って該決定されたしきい値を定義する評価ユニット(11)を含む、車両を安定させるための装置及び方法に関する。該評価ユニット(11)は決定された実際値と、横方向の運動変数に対する決定され場合によっては制限される目標値との比較に応じて、車両の運転安定性が増加するような方法で、車両の長手方向及び/又は横方向の運動に影響を与えるために設けられた車両のユニット(12)を作動させる。横方向の運動変数は車両の傾き角を表す傾き角変数、及び/又は車両の車輪に生じるスリップ角を表すスリップ角変数を有する。  (もっと読む)
(もっと読む)
協調型トラクション制御システム
個々の車輪の空転及び/又は横滑りを個別に制御する協調型トラクション制御システムである。該システムは、特定の車軸に備えられた所定の車輪に掛かる駆動トルクの量を調節できる駆動トルクアクチュエータに接続されている既存のトラクション及び挙動安定化モジュールを使用している。このシステムは、空転及び/又は横滑りしている車輪の駆動トルクの制御を行うか、或いは、ブレーキを作動させてスロットル角度を調節するとともに該駆動トルクの制御を行って、車輪の空転及び/又は横滑り及び/又は車両の動作を低減又は制御する。 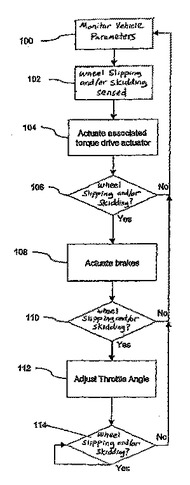 (もっと読む)
(もっと読む)
車両用支援システム
本発明は、車両用支援システム、特にエレクトロニックラリーコパイロットシステム、追い越し支援システムまたは右折優先通行支援システムに関する。本発明によれば、支援システムは少なくとも1つの制御ユニットを有し、この制御ユニットが認識したドライバー設定に基づいていわゆるグローバルデータ、ローカルデータおよび内部データの3つのグループから少なくとも1つのデータを選択し、これに依存して車両の走行ダイナミクスに関する出力信号が形成されるようにこれらを相互に結合する。本発明はさらに、3つ(ドライバー設定を入れれば4つ)のグループによって形成されたデータを有利には同時に処理する支援システムに関する。これにより、特に有利には、安全性に関するアプリケーションにとって特に重要なリダンダンシーが達成される。したがって本発明はこんにちの車両のラリーコパイロットシステム、追い越し支援システムおよび/または右折優先通行支援システムに適している。 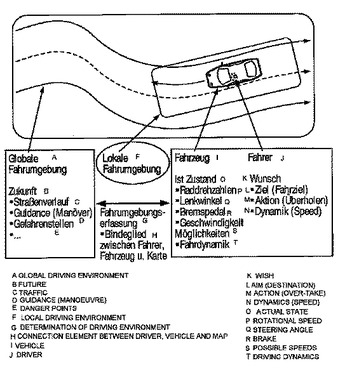 (もっと読む)
(もっと読む)
車両転覆軽減の方法および装置
車両の転覆事象を検出する方法を提供する。車両の横運動エネルギが、車両縦速度および車両横滑り角に応答して判定される。車両の横加速度が、測定される。タイヤ垂直力が、測定される。転覆潜在力インデックスが、横運動エネルギおよび横加速度に応答して判定される。転覆インデックスが、横加速度の要因およびタイヤ垂直力の要因によって転覆潜在力インデックスに重みを付けることによって判定される。比較を行って、転覆インデックスが所定の閾値を超えるかどうかを判定する。 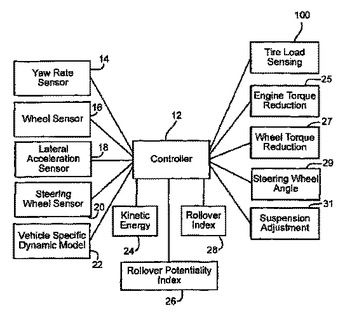 (もっと読む)
(もっと読む)
車両の走行推進力の制御方法、その方法を実施する装置とその用途
【課題】
車両の走行状態を任意の走行操縦にて所望状態に適合させること。
【解決手段】
この発明は、走行状態値の運転者指示値に対応する目標値(Ψ’ref )が走行状態値の検出された実際値(Ψ’)と比較されて、動揺モーメント分布が検出されて変更される車両の走行推進力を制御する方法に関する。この方法は、a.走行状態値の目標値(Ψ’ref )と走行状態値の実際値(Ψ’)との比較に基づいて車両の走行状態が決定され、b.所定の走行状態に依存して、予定走行状態に対応する新たな動揺モーメント分布が決定され、c.その新たな動揺モーメント分布が調整されることを実施される。さらに、この発明は、車両の前後車軸において動揺モーメント支持手段と車両の少なくとも一つの走行状態値(Ψ’)を検出するセンサーとを含む車両の走行推進力を制御する装置に関する。この装置は好ましくはヨーモーメントを補償するシステム(ESP)に使用され得る。  (もっと読む)
(もっと読む)
761 - 774 / 774
[ Back to top ]