
Fターム[3D246KA02]の内容
ブレーキシステム(制動力調整) (55,256) | 制御回路要素 (1,120) | フィルタ (128) | ローパスフィルタ (54)
Fターム[3D246KA02]に分類される特許
1 - 20 / 54
車両の制動制御装置
【課題】電気モータによって制動トルクを発生する車両の制動制御装置であって、電気モータの慣性を含む装置全体の慣性の影響を適正に補償し得るものを提供すること。
【解決手段】この装置では、制動操作部材の操作量Bpaに基づいて演算された目標通電量に基づいて電気モータが制御される。ブレーキアクチュエータの応答を表す時定数τmを有する遅れ要素DLY、及び、操作量Bpaに基づいて、ブレーキアクチュエータの慣性の影響を補償する慣性補償通電量Ijt,Iktが演算される。この慣性補償通電量Ijt,Iktに基づいて前記目標通電量Imtが演算される。
(もっと読む)
車両の制動制御装置

【課題】電気モータによって制動トルクを発生する車両の制動制御装置であって、電気モータの慣性を含む装置全体の慣性の影響を適正に補償し得るものを提供すること。
【解決手段】この装置では、制動操作部材の操作量Bpaに基づいて演算された目標通電量に基づいて電気モータが制御される。操作量Bpaに基づいて、ブレーキアクチュエータの慣性の影響を補償する慣性補償制御が必要であるか否かが判定される。慣性補償制御が必要であると判定された場合(FLj←1、又は、FLk←1)、ブレーキアクチュエータの最大応答に基づく予め設定された時系列のパターンCHj,CHkに基づいて、ブレーキアクチュエータの慣性の影響を補償する慣性補償通電量Ijt,Iktが演算される。この慣性補償通電量Ijt,Iktに基づいて前記目標通電量が演算される。
(もっと読む)
車両用制動力制御装置
【課題】ブレーキペダルのペダルストローク量にノイズが混入したときであっても、ブレーキフィーリングの悪化を防止すること。
【解決手段】車両用制動力制御装置は、ブレーキペダル1と、電動ブースタ2と、ストロークセンサ18と、マスターシリンダ圧力センサ19と、倍力装置指令値演算手段61と、平滑化処理手段63と、を備える。ストロークセンサ18で検出されたペダルストローク量と、マスターシリンダ圧力センサ19で検出されたマスターシリンダ圧力と、から倍力装置指令値演算手段61によって倍力装置指令値が演算されて、演算された倍力装置指令値に、平滑化処理手段63によって平滑化処理を施して、電動ブースタ2の動作量とする。
(もっと読む)
車両の運動制御装置
【課題】
日常運転領域から稼動するハンドル操作に連係した加減速を自動的におこない、限界運転領域で横滑りを確実に低減させるという、違和感が少なく、安全性能向上を可能とする技術および装置を提供する。
【解決手段】
前輪及び後輪の駆動力又は/及び制動力を制御可能な車両の運動制御装置において、横軸に車両の前後加速度、縦軸に車両の横加速度をとるダイアグラムを定義したときに、時間の経過とともに当該ダイアグラム上で曲線的な遷移をするように加減速制御指令を決定するコントローラと、加減速制御指令に基づいて、制動力又は/及び駆動力を決定する制動力駆動力配分部と、を有する。
(もっと読む)
液圧ブレーキシステム
【課題】複数のブレーキシリンダが接続された共通通路を備えた液圧ブレーキシステムにおいて、複数のブレーキシリンダの液圧が個別に制御されるとともに、共通通路の液圧が制御される場合に、共通通路の液圧制御において制御ハンチングを抑制する。
【解決手段】第1フィルタ処理部250、第2フィルタ処理部252は、共通通路液圧センサ226の検出値Prawの平均値を求め、フィルタ値として出力する。第1フィルタ処理部250において用いられる検出値の個数Nは、第2フィルタ処理部252において用いられる個数NABSより少なく、第2フィルタ値PvalABSは第1フィルタ値PvalNより平滑化のレベルが高い。並行共通通路液圧制御部260においては、第2フィルタ値PvalABSに基づいて共通通路の液圧制御が行われる。その結果、第1フィルタ値PvalNに基づく場合に比較して、制御ハンチングを抑制することができる。
(もっと読む)
車両速度推定装置及びトラクションコントロール装置
【課題】全輪駆動の建設車両が走行する路面状況が動的に変化する状況にあっても、高精度に車両速度を推定することのできる車両速度推定装置を提供すること。
【解決手段】車両速度推定装置は、回転速度検出手段で検出された各車輪の回転速度のうち、最も小さい回転速度を選択し、前記建設車両の参照車輪速度を所定の時間毎に算出する手段801を備え、手段801は、最も小さい回転速度に低域濾波フィルタ処理を行う時定数可変の可変フィルタ処理部814と、建設車両の走行状態に応じて、可変フィルタ処理部814の時定数を変更する時定数変更部809と、建設車両の変速機の状態を判定する変速状態判定部808とを備え、時定数変更部809は、変速状態判定部808で変速機が変速中であると判定されると、可変フィルタ処理部814の時定数を現在よりも大きくする変速状態時定数変更部812を備える。
(もっと読む)
車両速度推定装置及びトラクションコントロール装置
【課題】全輪駆動の建設車両が走行する路面状況が動的に変化する状況にあっても、高精度に車両速度を推定することのできる車両速度推定装置を提供すること。
【解決手段】車両速度推定装置は、回転速度検出手段で検出された各車輪の回転速度のうち、最も小さい回転速度を選択し、前記建設車両の参照車輪速度を所定の時間毎に算出する手段801を備え、手段801は、最も小さい回転速度に低域濾波フィルタ処理を行う可変フィルタ処理部814、建設車両の走行状態に応じて、可変フィルタ処理部814の時定数を変更する時定数変更部809、建設車両の変速機の状態を判定する変速状態判定部808を備え、時定数変更部809は、ロックアップの解除指令が出力されてから一定時間経過していない状態にあると判定されたら、可変フィルタ処理部814の時定数を変更するロックアップ切換時定数変更部813を備える。
(もっと読む)
車両の制動制御装置及び車両の制動制御方法
【課題】車両に加わる荷重に関係なく、運転手による制動操作に基づく車輪に対する制動力の増大を補助するための補助制御を適切に開始させることができる車両の制動制御装置及び車両の制動制御方法を提供する。
【解決手段】ブレーキ用ECUは、車両の荷重WWを取得し(ステップS142)、開始時間判断基準値KT2を荷重WWが重い場合には荷重WWが軽い場合よりも大きな値に設定する(ステップS144)。そして、ブレーキ用ECUは、車体減速度が第1の減速判定値を超えてからの経過時間が開始時間判断基準値KT2以下であると共に、Gセンサ値が第2の減速判定値を超えたときに、補助制御を開始する。
(もっと読む)
ホイール式作業機の油圧駆動装置
【課題】坂道発進に際して坂道を降下させずに発進させることのできるホイール式作業機の油圧駆動装置の提供。
【解決手段】本発明は、作業装置の作業に際して行われる走行体の一時的な停車モードである作業ブレーキモードを選択可能な切換スイッチ26と、制動用方向制御弁を制御可能な比例電磁弁27と、制動操作量用圧力センサ24から出力される信号に応じてブレーキ作動信号S1またはブレーキ解除信号S2を比例電磁弁27に出力可能なコントローラとを備えるとともに、コントローラは、走行操作量用圧力センサ18から出力される信号に応じてブレーキ解除信号S2に時間遅れを持たせる遅延手段を含み、この遅延手段によって遅延させたブレーキ解除信号S2を比例電磁弁27に出力させる処理を行う。
(もっと読む)
制動力制御装置
【課題】悪路走行時においても好適にEBD制御を実施可能とする。
【解決手段】制動力制御装置は、左後輪(WRL)に対応する第1油圧系統及び右後輪(WRR)に対応する第2油圧系統を備える車両の制動力を制御する。制動力制御装置は、各車輪の車輪速度を検出する車輪速度検出手段(83)と、後輪の車輪速度が所定の条件を満たした場合に、前輪及び後輪の動作量の差に基づいて第1及び第2油圧系統を制御することで、左後輪及び右後輪の制動力制御を独立して行う制御手段(110,120)と、車両が悪路を走行していることを検出する悪路検出手段(130)と、車両が悪路を走行していることが検出されており、左右いずれかの後輪の車輪速度が所定の条件を満たしている場合に、左後輪及び右後輪の各々のブレーキ油圧を油圧保持制御するよう制御手段を制御する油圧保持制御手段(140)とを備える。
(もっと読む)
車両用ブレーキ装置
【課題】電動アクチュエータによるブレーキ液圧とは別個に摩擦制動手段に対するブレーキ液圧を増減する場合にも、摩擦制動による通常制動や回生制動を伴う回生制動時の応答性や、目標液圧と実液圧との一致性を確保する。
【解決手段】ホイールシリンダ2b・3bにブレーキ液圧を与えるモータ駆動シリンダ13のモータ角(変位)を制御する液圧増減制御回路6aと、モータ駆動シリンダの電流を制御するトルク制御回路6bと、通常はモータ角制御を選択し、VSA装置26の作動時に切り替わって電流制御を選択する切替器48とを設ける。VSA作動時に、電流(トルク)を保持する制御を行うことから、ブレーキ操作量に応じたブレーキ液量を供給する状態にすると共に、従来型の直接的に操作するマスターシリンダによりブレーキ液量を供給する制動感覚で、適切な応答性によるブレーキ制御を行うことができる。
(もっと読む)
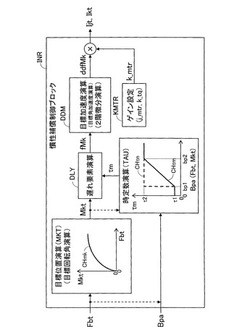
車両用ブレーキ装置
【課題】ブレーキ・バイ・ワイヤシステムにおけるブレーキ力の増減時の応答性を簡単な構成で運転者の感覚に合うようにする。
【解決手段】ブレーキペダルのストロークを操作量として操作量制動力変換回路31に入力し、その出力信号を増加用ローパスフィルタ32と減少用ローパスフィルタ33とに入力し、各出力を最大値選択回路34により大きい方を選択し、各ローパスフィルタの出力の大きい方で制御目標値Bmaxを生成し、制御目標値Bmaxが最終的な制動力目標値となる。ブレーキ操作量に対する制動力目標値の応答遅れを、ブレーキ操作量の増加側では小さく、ブレーキ操作量の減少側では大きくすることができ、各ローパスフィルタのカットオフ周波数(時定数)を調整するという簡単な構成で、運転者に違和感の無いブレーキフィーリングを与えることができる。
(もっと読む)
車両の制御装置
【課題】車両の旋回性能を向上させるために車両の駆動力および制動力を制御する場合に、共振の発生によるドライバビリティの低下を回避して、可及的に大きな旋回性能の向上効果を得ることができる車両の制御装置を提供すること。
【解決手段】車両の旋回走行時に駆動トルクもしくは制動トルクとして制御される制御トルクを該車両の駆動輪に付与することにより該車両のステアリング特性を変化させる車両の制御装置において、前記制御トルクを前記駆動輪に付与する際に、前記車両の共振周波数よりも低い値に設定される制限周波数以上の前記制御トルクを制限する周波数制限処理手段(ステップS4)と、前記旋回走行時に発生する前記車両の加速度に基づいて前記制限周波数を補正して更新する制限周波数補正手段(ステップS1,S2,S6)とを設けた。
(もっと読む)
車両の制動力制御装置
【課題】車両挙動を適切に保つ際のブレーキ制御量を最小化してドライバが感じる減速度(失速感)を最小とし、且つ、ブレーキ負荷を低減する。
【解決手段】エンジン駆動力を算出し、エンジン駆動力の時間的な変化量(駆動力の変化量)を算出し、車両に作用する走行抵抗を算出し、これら駆動力の変化量と走行抵抗とに基づいて、走行抵抗により発生する減速度を、ドライバが違和感なく許容できる(失速感として感じない)減速度として用いて、走行抵抗以上で、且つ、駆動力の変化量以下の車輪に付加する制動力(付加制動力)を設定して、この付加制動力を基に、目標ブレーキ液圧を算出してブレーキ駆動部15に出力する。
(もっと読む)
エンジン自動停止再始動制御装置
【課題】エンジン再始動時の車体の前後方向の振動をより抑制することができるエンジン自動停止再始動制御装置を提供する。
【解決手段】エンジン再始動を行う際に、ショック抑制ブレーキ制御を行い、実車軸トルク変化速度と理想車軸トルク変化速度との間の差である変化速度差に応じた制動トルクを発生させる。これにより、エンジン再始動時に生じる振動トルクを抑制することが可能となり、車体のショックを抑制することが可能となる。
(もっと読む)
ブレーキ制御装置
【課題】マスタシリンダと液圧ユニットを繋ぐ配管側と、液圧ユニットとホイルシリンダとを繋ぐ配管側とでは液圧剛性が異なるため、圧力変化に基づく演算に誤差が生じ、適切なベース圧が得られず、運転者に違和感を与えるという問題があった。運転者に違和感を与えることなくブレーキアシストが可能なブレーキ制御装置を提供すること。
【解決手段】ブレーキ制御装置において、ポンプの吐出流量に応じてマスタシリンダ圧を補正し、補正されたマスタシリンダ圧に基づいてホイルシリンダ圧を増減圧制御することとした。
(もっと読む)
車両の走行制御装置
【課題】車両の目標軌跡や実軌跡を求めるための車外情報の取得を要することなく、車両の軌跡が運転者の希望に則した軌跡になるよう操舵輪の舵角及び左右輪の前後力差を制御する。
【解決手段】運転者の操舵操作量に対する前輪の舵角の関係を変更する舵角可変装置14又はバイワイヤ式の操舵装置76を備えた車両の走行制御装置。車両の軌跡の制御を開始又は更新すべきと判定したときには(S350、450)、その時点に於ける運転者の操舵操作量及び車速に基づいて車両が目標進行方向にて目標到達位置に到達するに必要な目標軌跡に沿って車両を走行させるための前輪の目標舵角を演算し(S500)、一方の後輪の目標付加制動力を演算する(S1050)。そして目標舵角に基づいて前輪の舵角を制御し(S600)、目標付加制動力に基づいて後輪の制動力を制御する(S1060〜1100)。
(もっと読む)
車両挙動制御装置及びその方法
【課題】車両挙動制御により車両挙動がオーバーシュートしてしまうのを抑制する。
【解決手段】車両挙動制御装置は、操舵角比例目標ヨーレイト算出部12が算出した運転者の操舵操作に車両挙動を追従させるための自車両の目標ヨーレイトと推定ヨーレイト算出部13が算出した自車両の推定ヨーレイトとの偏差の変化を基に、自車両にヨーモーメントを付与するための目標ヨーモーメントを算出する目標ヨーモーメント算出部16と、目標ヨーモーメント算出部16が算出した目標ヨーモーメントを基に、ヨーモーメントを付与するVDCコントローラ3及びブレーキ液圧算出部17と、を備え、偏差の変化の推移に応じて、第1目標ヨーモーメント、第1目標ヨーモーメントよりも小さい付与抑制目標ヨーモーメント、及び第1目標ヨーモーメントとはヨーモーメントの方向が反対方向となる第2目標ヨーモーメントの順序で目標ヨーモーメントを算出する。
(もっと読む)
車両走行制御装置及びその方法
【課題】アンダステア抑制制御中の車両のタックインの発生に起因する制動力制御が運転者に違和感を与えてしまうのを防止する。
【解決手段】車両走行制御装置は、アンダステア抑制制御中のアクセルペダルの操作状態を基に、車両のタックインの発生を推定するタックイン推定部16と、タックイン推定部16がタックインが発生すると推定したとき、アンダステア抑制制御による前後輪の制動力を減少させて前後輪の制動力の付与を解除する減少勾配算出部17及びブレーキ液圧算出部18と、を有し、減少勾配算出部17及びブレーキ液圧算出部18は、前後輪の制動力配分を後輪寄りに設定して前後輪の制動力を減少させる。
(もっと読む)
すべり角推定装置
【課題】横加速度センサに異常が発生した場合は、その異常による影響を小さくしてすべり角を推定できるすべり角推定装置を提供することを課題とする。
【解決手段】実車挙動観測装置302は、β推定ブロック302aが推定するすべり角推定基準値βstdを、β補償ブロック302bが算出するすべり角補償値βcで補償して、推定重心すべり角βactを推定する。β補償ブロック302bは、横加速度センサから入力される横加速度信号GSに基づいて算出するすべり角補償値βcの大きさを、β補償器リミッタ322gで上限値βlmtuと下限値βlmtdの間に制限し、横加速度信号GSを出力する横加速度センサに異常が発生した場合に、すべり角補償値βcが上限値βlmtuより大きくなることおよび下限値βlmtdより小さくなることを防止する。
(もっと読む)
1 - 20 / 54
[ Back to top ]