
Fターム[3D301AA09]の内容
Fターム[3D301AA09]に分類される特許
1 - 20 / 90
車両のロール角推定方法及び装置
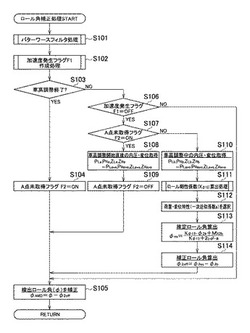
【課題】検出ロール角の補正精度の低下を抑制可能な方法及び装置の提供。
【解決手段】車両に発生する加速度が予め設定された所定加速度以上である場合、更新禁止状態であると判定し、所定加速度未満である場合、更新禁止状態ではないと判定する。更新禁止状態ではないと判定した場合、求めた補正ロール角φ2offを更新して記憶し、更新禁止状態であると判定した場合、補正ロール角φ2offの更新を実行しない。
(もっと読む)
減衰力調整式緩衝器

【課題】減衰力調整式緩衝器において、ピストンロッドに作用する横力を考慮して正確な減衰力制御を行なうことができるようにする。
【解決手段】コントローラCにより、各種センサの検出信号に基づき、車両の走行状態に応じて減衰力調整式緩衝器1の減衰力調整機構6のソレノイド7に制御電流を供給して、減衰力をリアルタイム制御することにより、車両の操縦安定性及び乗心地を向上させる。減衰力調整式緩衝器1のピストンロッド5に歪センサ19を装着する。コントローラCにより、歪センサ19の検出信号に基づき、ピストンロッド5に作用する横力を演算し、この横力によって生じるピストロッドとロッドガイドとの間の摩擦力に基づき、ソレノイド7への制御電流を補正することにより、正確な減衰力制御を行なう。
(もっと読む)
車両
【課題】 横風に強い車両を提供することを課題とする。
【解決手段】 第1発明の車両は、横風の発生を予知し、その予知された横風に基づいて、例えば、電子制御ユニットは、支持装置30を、あらかじめ作動させて横風に対処するように制御する。そのため、第1発明の車両は、横風に強い車両となる。また、第2発明の車両は、車体の左側を流れる気流と車体の右側を流れる気流との少なくとも一方を変化させることで、車体の左右を流れる気流の間に圧力差を発生させたり、車体の横風の風下側を流れる気流を車体に当てることで、横風に対抗する力を車体に作用させる。そのため、第2発明の車両は、横風に強い車両となる。
(もっと読む)
車両用エアサスペンション制御装置
【課題】車両の前輪が接地する路面の高さが左右で異なっていても、車両の左右一方の前輪が浮き上がったりすることを防止しつつ、クラウチング制御を確実に行うことができ、且つ圧縮エアの消費を抑制し得、更に、乗客の乗降に伴う車両後部における姿勢変化をも確実に防止し得る車両用エアサスペンション制御装置を提供する。
【解決手段】通常モード中に、車両がうねり路にいるか否かを判断し、該車両がうねり路にいる場合には、車両後部における左右それぞれのレベリング制御を強制的に休止させ、該車両後部における左右それぞれの車高のレベリング制御休止状態でクラウチング制御が行われた際、車両前部における左右の車高の平均値がクラウチング制御用基準範囲に収まった時点での車両後部における左右それぞれの車高を記憶し、クラウチング制御が終了するまでの間、車両後部における左右それぞれの車高を前記記憶した値に保持する。
(もっと読む)
サスペンション制御装置
【課題】サスペンションのストロ−ク速度の推定精度を向上可能とする。
【解決手段】制御装置20が、車輪速ωsに基づいて、車両平面運動成分および路面外乱成分を除去した車体速の成分である基準車体速成分Vb0を算出する。続いて、算出した基準車体速成分Vb0に基づいて、サスペンションのストロ−ク速度Vzを算出する。そして、算出したストロ−ク速度Vzに基づいてサスペンションのストロ−ク状態を制御する。それゆえ、例えば、車両平面運動成分や路面外乱成分が混入し、車輪速ωsの検出精度が低下しても、基準車体速成分Vb0の推定精度の低下を抑制できる。そのため、サスペンションのストロ−ク速度Vzの推定精度を向上できる。
(もっと読む)
車両用サスペンション装置
【課題】適切に車両の傾斜を抑制することができる車両用サスペンション装置を提供すること。
【解決手段】左車輪および右車輪にそれぞれ設けられたエアばねと、左車輪と右車輪とを接続し、車両に対してロール方向の力を発生するアクティブスタビライザと、を備え、停止時の路面の状態に応じて(S2−Y)エアばねによって変更した(S3,S4)左右の車高差を、発進後の走行路面状態に応じて変更する(S5−Y)ときに、エアばねによる車高調整、およびアクティブスタビライザが発生するロール方向の力によって車両の左右の傾斜を抑制する(S6)。
(もっと読む)
走行支援システム
【課題】自車両の走破性能を調整して地図上にない走行経路や災害等で不整地となった走行経路の走行を支援する。
【解決手段】他車両1が地図上にない不整地2(走行経路)を走行した際の状況に基づいて自車両3が不整地2を走行できるか否かを判断し、自車両の走破性能で走行が可能であれば自車両3の走破性能を調整して走行を支援する。
(もっと読む)
車両運動制御システム
【課題】車輪特殊配置車両の実用性を向上させる車両運動制御システムを提供する。
【解決手段】左右輪14の各々に対応して設けられた距離変更装置を制御してそれらの各々の動作量に差を設けることで車体を傾斜させる場合に、(i)実現させるべき車体の傾斜の程度に基づいて目標動作量差ΔLを決定し、(ii)増加させる方の距離変更装置の動作量ΔLUPと減少させる方の距離変更装置の動作量ΔLDWとへの目標動作量差ΔLの配分を決定し、(iii)その配分に基づいて2つの距離変更装置の各々の目標動作量を決定する。そのことにより、車体を傾斜させる際の車体の重心位置,左右輪と前後輪との荷重配分等を変更することが可能である。
(もっと読む)
車高調整装置
【課題】車高を所望の範囲内に効率良く収めることが可能な車高調整装置の提供。
【解決手段】車高調整制御部は、左右のサスペンションのそれぞれについて、検出変位と検出内圧とロール剛性係数とを用いて、左右のエアサスペンションが共に目標変位に設定された車高調整完了状態での内圧を目標内圧(PLb,PRb)として算出し、検出内圧と検出変位とを乗算した検出乗算値(PL_now×ZL_now,PR_now×ZR_now)が、目標内圧と目標変位とを乗算した目標乗算値(PLb×Zb,PRb×Zb)に近づくように、電磁バルブを制御する。
(もっと読む)
車両
【課題】 旋回性能を向上し、安定して旋回すると共に、簡単な機構で快適な乗り心地の車両を提供する。
【解決手段】 車体2と、車体に回転可能に取り付けられた車輪5と、車体2に連結される支持部材22,23,24,25と、支持部材23,24,25に対して回転可能に連結されると共に、車体2を旋回方向に傾斜させるリンク機構Lと、リンク機構Lを作動するアクチュエータ31と、左右の車輪5の接地点の高さ、車体2の傾斜方向に発生する第1の横加速度、、及び左右の車輪5の車輪速に応じてアクチュエータ31の回転速度を制御する制御部100と、を有する。
(もっと読む)
車両用エアサスペンション制御装置
【課題】車両の前輪が接地する路面の高さが左右で異なっていても、車両の左右一方の前輪が浮き上がったりすることを防止しつつ、クラウチング制御を確実に行うことができ、且つ圧縮エアの消費を抑制し得る車両用エアサスペンション制御装置を提供する。
【解決手段】クラウチング制御並びに車高調整制御が行われていないステップS1の通常モード中に、ステップS2において車両がうねり路にいるか否かを判断し、該車両がうねり路にいる場合には、ステップS3において車両後部における左右それぞれのレベリング制御を強制的に休止させるようにする。
(もっと読む)
移動機構
【課題】路面凹凸からの外乱を吸収し、傾斜路面であっても車体フレームを水平に保ち安定に走行する移動機構を構成する。
【解決手段】車体フレームに車輪を接続し移動する移動機構において、それぞれの車輪をスイングアームで車体に取り付け、それぞれのスイングアームを支えるコイルバネを懸架するピッチ・ロール方向に回動可能なテーブルの傾きを適切に制御することによって、車体フレームを水平に保ち安定に走行する移動機構を構成する。
(もっと読む)
車体振動推定装置およびこれを用いた車体制振制御装置
【課題】車輪速から車両振動を推定する装置が、車体制振制御の対象となる車体振動の全てを推定し得るものでない場合でも、当該推定し得ない車体振動を求め得る方法を提供する。
【解決手段】演算部51,52で求めた前輪速VwF、後輪速VwRに基づき、演算部53では車体の上下バウンス速度dZv(F)を求め、演算部54では車体のピッチ角速度dθp(F)を算出し、車体振動のみを表す振動成分(上下バウンス速度dZvおよびピッチ角速度dθp)を抽出。車体振動状態量補完部26は、dZvおよびdθpを微分器26a,26bにより微分して上下バウンス量Zvおよびピッチ角θpを求め、上下バウンス速度dZv(F)およびピッチ角速度dθp(F)と、上下バウンス量Zvおよびピッチ角θpとを演算部27に向かわせ、車体振動を抑制するのに必要な制駆動トルク補正量ΔTdを、車体振動とレギュレータゲインKrとの乗算値の線形和として求める。
(もっと読む)
鉄道車両の振動制御装置及び鉄道車両の振動制御方法
【課題】高速化する鉄道車両で近年問題となっている空力外乱力に対して、高い制振効果を与えることが可能な鉄道車両の振動制御装置及び鉄道車両の振動制御方法を提供する。
【解決手段】鉄道車両の車体1と台車2との間に設置されたアクチュエータ6と、車体の振動を検知するセンサ11と、センサ11の検知結果に基づいて、車体1の振動を抑えるようにフィードバック制御を行うためのフィードバック信号を生成するフィードバック制御器13と、センサ11の検知結果に基づいて、車体1に加えられた外乱力を推定する外乱力推定オブザーバ14aと、外乱力推定オブザーバ14aにより推定された外乱力に基づいて、当該外乱力を打ち消すようにフィードフォワード制御を行うためのフィードフォワード信号を生成するフィードフォワード制御器15と、フィードバック信号とフィードフォワード信号とに基づいて、アクチュエータ6を駆動するアクチュエータ駆動用ハードウェア30とを備える。
(もっと読む)
電気自動車等の走行抵抗低減方法
【課題】電気自動車等の空気抵抗、転がり抵抗の低減方法の提案。
【解決手段】平坦化した車両床下に積極的に走行風を流して走行抵抗係数の低減を図るとともに、特に高速走行時における走行の安定性を損なうことのない範囲内で、前記床下走行風によって揚力を発生させる揚力発生機構を設け、揚力の発生による車両接地荷重の低減即ち転がり抵抗の低減を図る。
また揚力発生機構による揚力発生量は車両重量等の変化に対応して可変とする。
(もっと読む)
車両用サスペンション装置
【課題】路面から車輪への入力が変動したときに、ステアリングホイールのぶれをより低減すること。
【解決手段】車両用サスペンション装置を、車輪が中立位置にあるときに、側面視でのホイールセンター高さにおけるキングピン軸とホイールセンターとの距離であるキャスタオフセットが、車輪の垂直軸周りのモーメントと車輪の横力との比から、設定した範囲内にあるものとした。
(もっと読む)
車両用サスペンション装置
【課題】路面から車輪への入力が変動したときに、ステアリングホイールのぶれをより低減すること。
【解決手段】車両用サスペンション装置を、そのキングピンオフセットδkと、キングピン頃角θkと、キャスタオフセットδcと、キャスタ角θcとが、δc・tan(θk)+δk・tan(θc)≦α(ただし、αはサスペンション構造に応じて設定した0近傍の値)なる関係を満たすように構成した。
(もっと読む)
車両用サスペンション装置
【課題】路面から車輪への入力が変動したときに、ステアリングホイールのぶれをより低減すること。
【解決手段】車両用サスペンション装置を、そのキングピンオフセットδkと、キングピン頃角θkと、キャスタオフセットδcと、キャスタ角θcとが、δc・tan(θk)+δk・tan(θc)≦α(ただし、αはサスペンション構造に応じて設定した0近傍の値)なる関係を満たすと共に、車輪が中立位置にあるときに、キャスタオフセットδcが、車輪の垂直軸周りのモーメントと車輪の横力との比から、設定した範囲内にあるように構成した。
(もっと読む)
車両用緩衝器
【課題】インパクトショックのみを効果的に低減でき車両における乗り心地を向上することができる車両用緩衝器を提供することである。
【解決手段】シリンダ1と、シリンダ1内に移動自在に挿入されるロッド2と、シリンダ1内に摺動自在に挿入されてロッド2に連結されるピストン3とを備えた車両用緩衝器Dにおいて、圧縮行程時に減衰力を発生させる減衰弁4を迂回する迂回流路5と、迂回流路5を開閉する開閉弁6とを備え、当該開閉弁6は車両の前から後へ向かう方向の加速度の作用によって迂回流路5を開放することを特徴とする。
(もっと読む)
車両用空気ばね装置
【課題】車両の台車と車体との間に二次ばねとして設置される空気ばねの減衰性能が、路線の全区間における区間条件、或いは全速度条件において車両の走行地点や走行速度に応じて的確に調整されるようにして車両の乗り心地を向上させることを課題としている。
【解決手段】台車と車体との間に配置する空気ばね10の内室11と外部の補助空気室12との間の空気通路に駆動源6を含む可変オリフィス4を設け、車両の走行地点又は走行速度に応じて設定した最適なオリフィス径を制御装置8に予め入力し、この制御装置からの指令で設定地点又は設定走行速度のときに設定されたオリフィス径となるように前記可変オリフィスを制御するようにした。
(もっと読む)
1 - 20 / 90
[ Back to top ]