
Fターム[3D301AA54]の内容
Fターム[3D301AA54]に分類される特許
1 - 20 / 234
立体加速度値の重力細分化制御装置
【課題】 車両及び搭乗者に制止時以外の加速度が検出された場合に、その加速度に対し立体座標に於ける点対称となるように車両や座席の傾き及び高さを素早く調節することによって、搭乗者及び走行への危険性が増す状態を軽減もしくはなくすようにする立体加速度値の重力細分化制御装置を提供する。
【解決手段】 単体加速度センサーの高速な情報をXYZ軸の立体加速度値として算出し、その立体加速度値を基にダンパの加減圧を個別制御し車両や座席の高さや角度を常時変化させて、現在の走行状況もしくは予め登録している走行状況に於ける加速度を相殺する機能を搭載する基盤を設けた立体加速度値の重力細分化制御装置を特徴とする。
(もっと読む)
車体傾動制御装置、車体傾動制御方法
【課題】旋回走行時に車体を旋回内側に傾動させる制御の精度を向上させる。
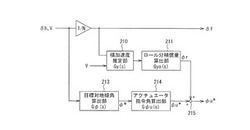
【解決手段】旋回走行時に車体をロール方向に沿って旋回内側に傾斜させる目標対地傾斜角φ*を算出し、旋回走行時における旋回外側へのロール運動分に相当する補償量φrを算出する。そして、目標対地傾斜角φ*及び補償量φrに応じて、駆動モータ3を駆動制御する。また、一次の応答遅れ特性をもつ車両モデル(Gy0(s))に従い、横加速度に応じて補償量φrを算出すると共に、車両モデル(Gy0(s))の時定数を、ロール等価粘性Cφとロール剛性Kφとの比に応じて決定する。また、車両モデル(Gy(s))に従い、運転者のステアリング操作及び車速に応じて、車体の横加速度を推定し、推定した横加速度に応じて補償量φrを算出する。
(もっと読む)
車体傾動制御装置、車体傾動制御方法

【課題】車体を旋回内側に傾動させるときの旋回性能を改善することである。
【解決手段】旋回走行時に車体をロール方向に沿って旋回内側に傾斜させる目標対地傾斜角φ*を設定し、設定した目標対地傾斜角φ*に応じて、駆動モータ3を駆動制御する。そして、車体の目標ヨーレートγ*を設定し、目標ヨーレートγ*及び車体のロール方向に沿った旋回内側への傾斜角に応じて、車体のヨーレートを制御する。具体的には、操舵角及び車速に応じて、車体の目標ヨーレートγ*を設定し、車体をロール方向に沿って旋回内側に傾斜させるときのキャンバスラストに起因したヨー運動分に相当するキャンバスラスト分補償量δcを算出する。そして、目標ヨーレートγ*及びキャンバスラスト分補償量δcに応じて、車体のヨーレートを制御する。
(もっと読む)
車両
【課題】乗員の動揺に関する乗り心地を向上させることができるようにする。
【解決手段】一対のサイドサポート部22によって、シート20に着座している乗員の左右方向の動きを抑制するように乗員の胴体部を拘束する。車両のサスペンションのサスペンション特性により、車室部のロール方向の共振周波数が、乗員の頭部の左右方向の共振周波数帯域の下限以下に設定されている。これによって、乗員の胴体部の左右方向の動きを抑制すると共に、頭部の左右方向の揺れを抑制するため、乗員の動揺に関する乗り心地を向上させる。
(もっと読む)
車両用サスペンション装置
【課題】適切に車両の傾斜を抑制することができる車両用サスペンション装置を提供すること。
【解決手段】左車輪および右車輪にそれぞれ設けられたエアばねと、左車輪と右車輪とを接続し、車両に対してロール方向の力を発生するアクティブスタビライザと、を備え、停止時の路面の状態に応じて(S2−Y)エアばねによって変更した(S3,S4)左右の車高差を、発進後の走行路面状態に応じて変更する(S5−Y)ときに、エアばねによる車高調整、およびアクティブスタビライザが発生するロール方向の力によって車両の左右の傾斜を抑制する(S6)。
(もっと読む)
車両用サスペンション制御装置
【課題】スタビライザの状態を変化させる場合の車両のロール方向のばね力とロール方向の減衰力との比の変動を抑制することができる車両用サスペンション制御装置を提供すること。
【解決手段】左車輪に接続された左スタビライザバー11と右車輪に接続された右スタビライザバー12とを連結した連結状態と、左スタビライザバーと右スタビライザバーとを遮断した遮断状態とに切替え可能なスタビライザ10と、左車輪および右車輪にそれぞれ配置されたエアサスペンションと、左車輪に配置されたエアサスペンション41FLの空気室41dと右車輪に配置されたエアサスペンション41FRの空気室とを連通する通路53Fと、通路の流路断面積を変更する調節機構55と、を備え、スタビライザの連結状態と遮断状態とが切り替わるときの車両のロール方向のばね力とロール方向の減衰力との比の変動を抑制するように調節機構を制御する。
(もっと読む)
キャンバ制御装置
【課題】所定の車輪にキャンバが付与されることで運転者が違和感を覚えるのを防止することができるようにする。
【解決手段】車両のボディと、複数の車輪と、所定の車輪に配設され、車輪にキャンバを付与するためのキャンバ可変機構と、車両が極低μ路を走行しているかどうかを判断する走行路判断処理手段と、該走行路判断処理手段によって、車両が極低μ路を走行していると判断された場合に、極低μ路用のキャンバ解除条件が成立したかどうかを判断するキャンバ解除条件成立判断処理手段と、キャンバ解除条件成立判断処理手段によって、極低μ路用のキャンバ解除条件が成立したと判断された場合に、所定の車輪へのキャンバの付与を解除するキャンバ解除処理手段とを有する。操舵部材を操作したときにタイヤに大きなキャンバスラストが発生するのを防止することができる。
(もっと読む)
車両用制御装置
【課題】撮像手段による撮像内容を用いて、自車の走行車線を維持するように車両を制御する車両用制御装置に関し、車輪のキャンバ角を調整することで、走行車線を維持可能な車両用制御装置を提供する。
【解決手段】車両用制御装置100は、フロントカメラ85により前方の走行車線DLを撮像し、画像処理部86により画像解析することにより、走行車線DLにおける左車線境界LL、右車線境界LR、自車位置を特定する。特定結果に基づき、自車が当該走行車線を逸脱しそうであると判断すると、当該車両用制御装置100は、右後輪2RR、左後輪2RLに夫々配設されたキャンバ角調整装置90を制御して、何れか一方の車輪に係るキャンバ角を、他方の車輪と異なるキャンバ角に変更し、キャンバースラストにより走行車線DL中央へと導く。
(もっと読む)
車両状態量推定装置
【課題】車両の挙動制御時における挙動の急変を抑制することのできる車両状態量推定装置を提供すること。
【解決手段】車両1の挙動制御に用いる目標横加速度Gytを車両1の走行時における横加速度実測値Gysと横加速度推定値Gyeとに基づいて推定する車両状態量推定装置2において、横加速度実測値Gysと横加速度推定値Gyeとに基づいて目標横加速度Gytを推定する場合には、車両1の横滑りの状態に応じて横加速度実測値Gysと横加速度推定値Gyeとに重み付けを行うことにより推定すると共に、横滑りが所定値以上になった場合には横滑りの状態に関わらず横加速度実測値Gysの重み付けが大きい状態を維持し、横加速度実測値Gysと横加速度推定値Gyeとの差が所定値以下の状態が所定時間継続した場合に、横加速度実測値Gysの重み付けが大きい状態を解除する。
(もっと読む)
車両
【課題】車両を安定させて走行させることができ、乗員が違和感を感じることがないようにする。
【解決手段】本体部と、搭乗部と、操舵部と、車両傾斜装置と、横加速度を検出する横加速度検出部と、横加速度に応じて傾斜制御用の制御値を発生させる傾斜制御処理手段と、傾斜制御用の制御値に基づいてアクチュエータを駆動する傾斜駆動制御処理手段と、加速操作部材の操作量に基づいて走行制御用の制御値を発生させる走行制御処理手段と、走行制御用の制御値に基づいて走行用の駆動部を駆動する走行駆動制御処理手段とを有する。走行制御処理手段は、共振の状態を判定する共振発生状態判定処理手段及び共振の状態に応じて、走行用の駆動部における駆動力の発生を抑制する駆動力抑制処理手段を備える。
(もっと読む)
車両
【課題】傾斜制御を精度良く行うことができるようにする。
【解決手段】本体部と、搭乗部と、操舵部と、車両傾斜装置と、横加速度を検出する横加速度検出部と、横加速度に応じて傾斜制御用の制御値を発生させる傾斜制御処理手段と、傾斜制御用の制御値に基づいてアクチュエータを駆動する傾斜駆動制御処理手段と、走行制御用の制御値を発生させる走行制御処理手段と、走行用の駆動部を駆動する走行駆動制御処理手段とを有する。前記走行制御処理手段は、車両に許容範囲を超えて発生する傾斜状態を判定する傾斜状態判定処理手段、及び傾斜状態に応じて駆動力の発生を抑制する駆動力抑制処理手段を備える。車両に許容範囲を超えて発生する傾斜状態が判定され、判定された傾斜状態に応じて、走行用の駆動部における駆動力の発生が抑制されるので、車両が許容範囲を超えて傾斜させられることがなくなる。
(もっと読む)
車両
【課題】車両を安定させて走行させることができ、運転者が違和感を感じることがないようにする。
【解決手段】本体部と、搭乗部と、操舵部と、車両傾斜装置と、横加速度を検出する横加速度検出部と、横加速度に応じて傾斜制御用の制御値を発生させる傾斜制御処理手段と、傾斜制御用の制御値に基づいてアクチュエータを駆動する傾斜駆動制御処理手段と、走行用の駆動部を駆動するための走行制御用の制御値を発生させる走行制御処理手段と、走行制御用の制御値に基づいて走行用の駆動部を駆動する走行駆動制御処理手段とを有する。前記走行制御処理手段は、車両の前後方向における重心の移動量を算出し、最大角加速度を算出し、最大角加速度に基づいて前記傾斜制御用の制御値の変動を制限する制御値制限処理手段を備える。
(もっと読む)
サスペンション装置
【課題】緩衝器の発生減衰力の急変を緩和して車両における乗り心地を向上することができるサスペンション装置を提供することである。
【解決手段】上記目的を達成するために、本発明の課題解決手段は、車両における車体と車輪との間に介装されて車体と車輪との上下方向の相対移動を抑制する減衰力を発揮する緩衝器2と、減衰力を調節する減衰力調整機構3と、目標減衰力に基づいて当該減衰力調整機構3を制御する制御装置4とを備えたサスペンション装置1において、制御装置4は、緩衝器2の伸縮速度が0および所定速度における緩衝器の発生減衰力の変化を緩和するように目標減衰力を補正する補正手段43を備え、当該補正手段43は、緩衝器2の伸縮速度xが速度閾値Vp2を超えると当該伸縮速度xが0となるまでは、速度閾値Vp2と所定速度Vp1の差分βだけ速度増側へオフセットして発生減衰力を補正し、当該差分βから0までは発生減衰力を最小とするよう補正する。
(もっと読む)
車両
【課題】車体の安定を維持することができ、旋回性能を向上させることができ、乗員が違和感を感じることがなく、乗り心地がよく、安定した走行状態を実現することができるようにする。
【解決手段】互いに連結された操舵部及び駆動部を備える車体と、車体を操舵する操舵輪と、車体を駆動する駆動輪と、車体に作用する横加速度及び前後加速度を検出するセンサと、操舵部又は駆動部を旋回方向に傾斜させるリンク機構と、リンク機構を作動させる傾斜用アクチュエータ装置と、車体の傾斜を制御する制御装置とを有し、制御装置は、センサが検出する横加速度に基づく傾斜制御を行うとともに、センサが検出する横加速度及び前後加速度に基づいて重心位置が制御可能な範囲を外れたか否かを判断し、重心位置が制御可能な範囲を外れた場合には車体を傾斜させる動作を停止させる。
(もっと読む)
車両
【課題】ブレーキをかけても、車体の安定を維持することができ、乗員が違和感を感じることがなく、乗り心地がよく、安定した走行状態を実現することができるようにする。
【解決手段】互いに連結された操舵部及び駆動部を備える車体と、操舵輪と、駆動輪と、車体に作用する横加速度を検出する横加速度センサと、車速を検出する車速検出手段と、操舵部又は駆動部を旋回方向に傾斜させるリンク機構と、リンク機構を作動させる傾斜用アクチュエータ装置と、傾斜用アクチュエータ装置を制御して車体の傾斜を制御する制御装置とを有し、制御装置は、横加速度に基づく傾斜制御を行うとともに、最大減速度で減速した場合であっても、停止するまでの時間内に車体の傾斜角を安定傾斜角にまで復帰させることが可能であるように、車速を制御する。
(もっと読む)
車両
【課題】車体の安定を維持することができ、旋回性能を向上させることができ、乗員が違和感を感じることがなく、乗り心地がよく、安定した走行状態を実現することができるようにする。
【解決手段】互いに連結された操舵部及び駆動部を備える車体と、車体を操舵する操舵輪と、車体を駆動する駆動輪と、操舵部又は駆動部を旋回方向に傾斜させる傾斜用アクチュエータ装置と、横加速度を検出するセンサと、ヨー角速度検出手段と、車速検出手段と、傾斜用アクチュエータ装置を制御して車体の傾斜を制御する制御装置とを有し、制御装置は、横加速度に基づくフィードバック制御を行うとともに、ヨー角速度の微分値及び車速からリンク角速度予測値を算出し、算出したリンク角速度予測値を使用したフィードフォワード制御を行って車体の傾斜を制御する。
(もっと読む)
サスペンション制御装置
【課題】車体姿勢を目標姿勢に追従させる。
【解決手段】車体の目標姿勢と、この目標姿勢を実現するために必要な目標制御量とを設定し(ステップS2、S3)、目標姿勢と実際の車体姿勢との姿勢偏差をフィードバック項として算出し(ステップS4)、この姿勢偏差に基づいて、車体姿勢を目標姿勢に一致させるために必要な補正量を算出する(ステップS5)。そして、補正量に応じて目標制御量を補正し(ステップS6)、補正した目標制御量に応じてアクチュエータを駆動制御することで、サスペンションストロークの制御を行う(ステップS7)。
(もっと読む)
車両用制御装置
【課題】車輪のキャンバ角を調整するキャンバ角調整装置を備えた車両に用いられる車両用制御装置に関し、キャンバ角の調整に伴って生じる車両の挙動特性の変化に基づく違和感を、運転者等に与えることのない車両用制御装置を提供する。
【解決手段】車両用制御装置100は、安定キャンバ付与基準データ72B等に規定された条件を満たす場合、キャンバ角調整装置44を制御し、左後輪2RL及び右後輪2RRのキャンバ角を調整する。又、車両用制御装置100は、旋回判定基準データ72Cの基準値と、加速度センサ装置80等の検出値を比較することで、車両1が旋回中であるか否かを判定する。車両1が旋回中である場合、車両用制御装置100は、安定キャンバ付与基準データ72Bに係る条件を満たしていても、キャンバ角調整装置44によるキャンバ角の調整を禁止する。
(もっと読む)
サスペンション装置
【課題】緩衝器の発生減衰力の急変を緩和して車両における乗り心地を向上することができるサスペンション装置を提供することである。
【解決手段】上記目的を達成するために、本発明の課題解決手段は、車両における車体と車輪との間に介装されて車体と車輪との上下方向の相対移動を抑制する減衰力を発揮する緩衝器2と、減衰力を調節する減衰力調整機構3と、目標減衰力に基づいて当該減衰力調整機構3を制御する制御装置4とを備えたサスペンション装置1において、制御装置4は、緩衝器2の伸縮速度が0および所定のダンパ速度閾値における緩衝器の発生減衰力の変化を緩和するように目標減衰力を補正する補正手段43と、補正手段43における演算で使用する緩衝器2の伸縮速度を当該伸縮速度の変化に応じて補正する速度補正手段44を備えた。
(もっと読む)
サスペンション装置
【課題】緩衝器の発生減衰力の急変を緩和して車両における乗り心地を向上することができるサスペンション装置を提供することである。
【解決手段】上記目的を達成するために、本発明の課題解決手段は、車両における車体と車輪との間に介装されて車体と車輪との上下方向の相対移動を抑制する減衰力を発揮する緩衝器2と、減衰力を調節する減衰力調整機構3と、目標減衰力に基づいて当該減衰力調整機構3を制御する制御装置4とを備えたサスペンション装置1において、制御装置4は、緩衝器2の伸縮速度が0および所定のダンパ速度閾値における緩衝器の発生減衰力の変化を緩和するように目標減衰力を補正する補正手段43を備える。
(もっと読む)
1 - 20 / 234
[ Back to top ]