
Fターム[3D301AB03]の内容
Fターム[3D301AB03]に分類される特許
1 - 20 / 56
車体傾動制御装置、車体傾動制御方法
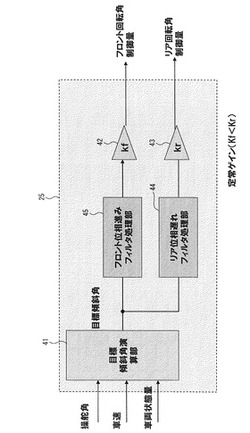
【課題】車体を旋回内側に傾動させる際に、アンダーステア特性を得やすくする。
【解決手段】前輪における左右の輪荷重移動量が、後輪における左右の輪荷重移動量よりも大きくなるように、前側駆動モータ3f及び後側駆動モータ3rを駆動制御する。具体的には、前側駆動モータ3fに対するフロント回転角制御量、及び後側駆動モータ3rに対するリア回転角制御量を算出する際、フロント回転角制御量よりもリア回転角制御量を大きくすると共に、リア回転角制御量の応答時間をフロント回転角制御量の応答時間よりも遅くする。又は、前側駆動モータ3fに対するフロント回転角制御量、及び後側駆動モータ3rに対するリア回転角制御量を算出する際、フロント回転角制御量よりもリア回転角制御量を大きくすると共に、フロント回転角制御量の応答時間をリア回転角制御量の応答時間よりも早くする。
(もっと読む)
車両制御システムおよび制御装置

【課題】乗り心地と操縦安定性とを両立して向上させることができる車両制御システムおよび制御装置を提供する。
【解決手段】車両の振動を吸収するばね剛性を変更するばね剛性変更装置と、車両の振動を減衰する減衰量を可変可能な減衰量変更装置と、車両に発生する振動のうち路面入力による振動を推定する路面入力振動推定部と、振動のうちドライバ操作による振動を推定するドライバ操作振動推定部と、ばね剛性変更装置を制御して路面入力による振動を吸収させ、減衰量変更装置を制御してドライバ操作による振動を減衰させる制御部と、を備えることで上記課題を解決する。
(もっと読む)
サスペンション装置
【課題】操舵初期における車体のロールを充分に抑制でき、さらには、車体の左右の揺り返しを防止し、車両における乗り心地を向上させることができるサスペンション装置を提供することである。
【解決手段】緩衝器2nと、当該緩衝器2nにおける減衰力を調節可能な減衰力調整機構3と、当該減衰力調整機構を制御する制御装置4とを備えたサスペンション装置1において、車体Bの横加速度Gを検知する横加速度検知部5と、車体Bのロール角速度ωを検知するロール角速度検知部6と、操舵輪Sの舵角速度θを検知する舵角速度検知部7とを備え、制御装置4は、舵角速度θが所定の不感帯域を超えると、舵角速度θから求めた減衰力Fθと、横加速度Gから求めた減衰力FGと、ロール角速度ωから求めた減衰力Fωのうち、最大の減衰力を操舵初期加算減衰力とし、当該操舵初期加算減衰力を用いて緩衝器が発生すべき最終減衰力Dnを求めて緩衝器2nを制御する操舵初期制御を行う。
(もっと読む)
サスペンション制御装置
【課題】 車両の横加速度に応じて車輪の輪荷重を制御し、車両の安定性を高めるようにする。
【解決手段】 車体1には横加速度Ayを検出する横加速度センサ12を設ける。横加速度センサ12は、検出信号をコントローラ14に入力する。コントローラ14は、横加速度Ayの増加中には、前輪2の輪荷重をアップする、またはダウンさせにくくするように、前輪側の減衰力可変ダンパ6の減衰力特性をハード側に設定し、後輪側の減衰力可変ダンパ6の減衰力特性をソフト側に設定する。また、コントローラ14は、横加速度Ayの減少中には、後輪3の輪荷重をアップする、またはダウンさせにくくするように、前輪側の減衰力可変ダンパ6の減衰力特性をソフト側に設定し、後輪側の減衰力可変ダンパ9の減衰力特性をハード側に設定する。
(もっと読む)
車両用制御装置
【課題】車両の旋回性能を向上させることができる車両用制御装置を提供すること。
【解決手段】旋回度減少期の車速がUS限界値を超え、ステア特性がアンダステアになる恐れがある場合には、左右の後輪2RL,2RRの旋回内輪のキャンバ角を絶対値が大きくなるように調整して旋回外輪のキャンバ角よりも大きくなるようにネガティブキャンバ方向へ調整することで、左右の後輪2RL,2RRの旋回内輪に発生するキャンバスラストを旋回外輪に発生するキャンバスラストよりも大きくして、ステア特性をオーバステア傾向にするためのヨーモーメントを車両1に作用させることができる。よって、アンダステアを抑制することができる。
(もっと読む)
車両用制御装置
【課題】車両の旋回性能を向上させることができる車両用制御装置を提供すること。
【解決手段】旋回度増加期の車速がUS限界値を超え、ステア特性がアンダステアになる恐れがある場合には、左右の後輪2RL,2RRの旋回内輪のキャンバ角を旋回外輪のキャンバ角よりも大きくなるようにネガティブキャンバ方向へ調整することで、左右の後輪2RL,2RRの旋回内輪に発生するキャンバスラストを旋回外輪に発生するキャンバスラストよりも大きくして、ステア特性をオーバステア傾向にするためのヨーモーメントを車両1に作用させることができる。よって、アンダステアを抑制することができる。
(もっと読む)
車両用制御装置
【課題】車両の旋回性能を向上させることができる車両用制御装置を提供すること。
【解決手段】旋回度増加期の車速がUS限界値を超え、ステア特性がアンダステアになる恐れがある場合には、左右の後輪の旋回内輪のキャンバ角を旋回外輪のキャンバ角よりも大きくなるようにネガティブキャンバ方向へ調整することで、左右の後輪の旋回内輪に発生するキャンバスラストを旋回外輪に発生するキャンバスラストよりも大きくして、ステア特性をオーバステア傾向にするためのヨーモーメントを車両に作用させることができる。よって、アンダステアを抑制することができる。
(もっと読む)
車両
【課題】旋回時にも車体の安定を維持することができ、制御安定性を向上させることができるとともに、乗員が違和感を感じることがなく、乗り心地がよく、安定した走行状態を実現することができるようにする。
【解決手段】互いに連結された操舵(だ)部及び駆動部を備える車体と、車体を操舵する操舵輪と、車体を駆動する駆動輪と、操舵部又は駆動部を旋回方向に傾斜させる傾斜用アクチュエータ装置と、前後方向に関して異なる位置に配設され、車体に作用する横加速度を検出する複数の横加速度センサと、傾斜用アクチュエータ装置を制御して車体の傾斜を制御する制御装置とを有し、制御装置は、複数の横加速度センサが検出する横加速度から、仮想横加速度検出位置における推定横加速度を算出し、推定横加速度がゼロになるように、車体の傾斜を制御する。
(もっと読む)
車両の挙動を特徴付けて向上させる方法
車両用サスペンション装置
【課題】路面から車輪への入力が変動したときに、ステアリングホイールのぶれをより低減すること。
【解決手段】車両用サスペンション装置を、車輪が中立位置にあるときに、側面視でのホイールセンター高さにおけるキングピン軸とホイールセンターとの距離であるキャスタオフセットが、車輪の垂直軸周りのモーメントと車輪の横力との比から、設定した範囲内にあるものとした。
(もっと読む)
車両用サスペンション装置
【課題】路面から車輪への入力が変動したときに、ステアリングホイールのぶれをより低減すること。
【解決手段】車両用サスペンション装置を、そのキングピンオフセットδkと、キングピン頃角θkと、キャスタオフセットδcと、キャスタ角θcとが、δc・tan(θk)+δk・tan(θc)≦α(ただし、αはサスペンション構造に応じて設定した0近傍の値)なる関係を満たすように構成した。
(もっと読む)
車両用サスペンション装置
【課題】路面から車輪への入力が変動したときに、ステアリングホイールのぶれをより低減すること。
【解決手段】車両用サスペンション装置を、そのキングピンオフセットδkと、キングピン頃角θkと、キャスタオフセットδcと、キャスタ角θcとが、δc・tan(θk)+δk・tan(θc)≦α(ただし、αはサスペンション構造に応じて設定した0近傍の値)なる関係を満たすと共に、車輪が中立位置にあるときに、キャスタオフセットδcが、車輪の垂直軸周りのモーメントと車輪の横力との比から、設定した範囲内にあるように構成した。
(もっと読む)
車両の運動制御装置
【課題】過渡操舵(レーンチェンジ挙動)が行われる場合において、運転者へ違和感を与えることなくステア特性制御を確実に実行して車両の安定性を確保すること。
【解決手段】直進状態から、一旋回方向側において急激なステアリングホイールの切り込み・切り戻し操作(第1操舵)が行われ、その後に連続して他旋回方向側においてステアリングホイールの切り込み・切り戻し操作(第2操舵)が行われる場合を想定する。第1操舵中は第1演算特性MP1に基づいてステア特性が調整され、第2操舵中は第2演算特性MP2に基づいてステア特性が調整される。第1操舵中において旋回変化量dJr(操舵角速度)が所定値を超えたとき、第2演算特性MP2がよりアンダステア側の特性に直ちに修正される。即ち、第1操舵に連続する第2操舵が開始される前にて、第2操舵に対応するステア特性制御の目標特性がよりアンダステア側の特性に予め修正される。
(もっと読む)
サスペンション装置及び荷重付与装置
【課題】操舵初期の車体ロールのフィーリングを改善したサスペンション装置等を提供する。
【解決手段】左右の前輪をそれぞれ支持する前輪支持部材と、車両前後方向に略沿って延び車幅方向に離間して配置されたサイドメンバ10と、左右のサイドメンバにわたして設けられたクロスメンバ40と、左右の前輪支持部材とクロスメンバとを連結するサスペンションアーム70とを備えるサスペンション装置を、クロスメンバの中間部分に車両後方側への荷重を付与する荷重付与装置100を備える構成とする。
(もっと読む)
車両用制御装置
【課題】製品コストの低減を図りつつ、交差点を旋回する場合の旋回性能の向上を図ることができる車両用制御装置を提供すること。
【解決手段】旋回初期では後輪のキャンバ角をポジティブキャンバに調整するので、ステアリング特性をオーバーステア傾向にすると共に、車両のヨーレートの増加を図ることができる。よって、比較的大きな操舵角が必要とされる交差点の旋回において、旋回回頭性を向上できる。旋回中期では後輪のキャンバ角を定常角(0°)に調整するので、ステアリング特性をニュートラルステア傾向とすることができる。よって、一定の旋回半径で旋回し遠心力が大きな旋回中期において、旋回安定性を向上できる。旋回終期では、後輪のキャンバ角をネガティブキャンバに調整するので、ステアリング特性をアンダーステア傾向にすることができる。よって、比較的大きな操舵角が必要とされる交差点の旋回において、旋回収束性を向上させることができる。
(もっと読む)
車両用サスペンション装置
【課題】車両姿勢の安定を確保しながらも、ドライバーの操作に対して応答性よく減衰力を制御してドライビングフィールを高められる車両用サスペンションを提供する。
【解決手段】本発明に係る車両用サスペンション装置は、車両10の車体と車輪2〜5の間に介装されたサスペンションに減衰力可変機構6〜9を備え、減衰力可変機構の減衰力特性を制御するもので、ステアリング40の操舵角情報θと操舵角速度情報dθを出力する操舵情報出力手段31と、操舵情報出力手段より出力された操舵角情報と操舵角速度情報の変位方向が同一方向の場合にはステアリングの切込み操作と判定して減衰力可変機構の減衰力特性を大きくなるように制御し、操舵角情報と操舵角速度情報の変位方向が異なる方向の場合にはステアリングの切戻し操作と判定し、減衰力可変機構の減衰力特性を切り込み操作と判定された場合よりも小さくなるように制御する制御手段20を有する。
(もっと読む)
減衰力可変ショックアブソーバの制御装置
【課題】より適正に減衰力を制御する減衰力可変ショックアブソーバの制御装置を提供する。
【解決手段】前軸に設けられた前軸横Gセンサで検出された前軸横G(Gyf)及び後軸に設けられた後軸横Gセンサで検出された後軸横G(Gyr)の絶対値を各々算出し(S1〜S2)、前軸横Gの絶対値(|Gyf|)又は後軸横Gの絶対値(|Gyr|)のいずれか大きい方を制御値Gtとして選択し(S3)、制御値Gtが予め設定した閾値a以上である場合には、前軸横G(Gyf)および後軸横G(Gyr)を利用しロール挙動の状態判定を行い(S4〜S8)、制御値Gtに応じて、減衰力可変ショックアブソーバの減衰力を変更する(S9〜S13)。
(もっと読む)
車両用制御装置
【課題】旋回回頭性と旋回安定性との両立を図ることができる車両用制御装置を提供すること。
【解決手段】車両の走行速度が所定の低速範囲内にあるか否か且つ旋回初期の回頭要求があるか否かを判断し、走行速度が低速範囲内にあると判断され且つ回頭要求があると判断される場合に、前輪のキャンバ角をネガティブキャンバに調整するので、旋回初期のステアリング特性を軽いオーバーステア傾向にすることができる。よって、車両の旋回回頭性を向上できる。さらに、キャンバスラストによるヨーモーメントが車両に作用することを抑制できるため、車両の旋回安定性を向上できる。以上のことから、車両の旋回回頭性と旋回安定性との両立を図ることができる。
(もっと読む)
車両用制御装置
【課題】操縦安定性の向上を図ることができる車両用制御装置を提供すること。
【解決手段】横方向状態量判断手段により横方向状態量が第一条件および第二条件を満たすと判断される場合には、第一キャンバ角調整手段によって前輪および後輪のキャンバ角が調整される。前輪および後輪のキャンバ角を調整することで、旋回性能を最大限発揮させて、操縦安定性の向上を図ることができる。一方、第一条件のみを満たすと判断される場合は、前輪または後輪のいずれか一方のキャンバ角を調整することで、不必要なキャンバ角の調整を抑制して車両が不安定な状態になるのを回避しつつ、必要な旋回性能を確保することができる。このように、必要なキャンバ角だけを調整して、車両の操縦安定性の向上を図ることができる。
(もっと読む)
車両のローリング挙動制御装置
【課題】構成物の横変位により操舵時のローリング挙動を抑制する際、横変位の反作用によって、操舵に伴うローリング挙動が許容限界を超えることのないようにする。
【解決手段】ローリング制御用可動構成物の横変位量制御が開始されたとき、先ず車両状態検出部21で操舵角θ、車輪速ω、ヨーレートΦ、前後加速度αxT、横加速度αyT、およびモータ回転角φを検出する。次に、可動構成物変位量目標値算出部22で、上記の操舵角θおよび車輪速ωを用い、操舵周波数が高いほど小さくなるような可動構成物のローリング挙動変化抑制用目標横変位量を演算する。その後可動構成物駆動部23で、上記可動構成物の目標横変位量と、上記ヨーレートΦ、前後加速度αxT、横加速度αyT、およびモータ回転角φとから、可動構成物の目標横変位量を実現するのに必要なモータ駆動トルク指令値を算出し、これをモータ用サーボドライバへ出力する。
(もっと読む)
1 - 20 / 56
[ Back to top ]