
Fターム[3D301AB06]の内容
Fターム[3D301AB06]に分類される特許
1 - 20 / 82
車両
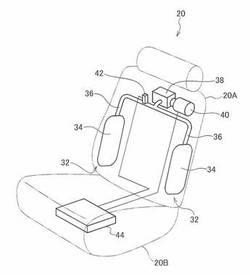
【課題】乗員の動揺に関する乗り心地を向上させることができるようにする。
【解決手段】一対のサイドサポート部22によって、シート20に着座している乗員の左右方向の動きを抑制するように乗員の胴体部を拘束する。車両のサスペンションのサスペンション特性により、車室部のロール方向の共振周波数が、乗員の頭部の左右方向の共振周波数帯域の下限以下に設定されている。これによって、乗員の胴体部の左右方向の動きを抑制すると共に、頭部の左右方向の揺れを抑制するため、乗員の動揺に関する乗り心地を向上させる。
(もっと読む)
キャンバ角調整装置

【課題】安価でありながら、信頼性のあるキャンバ角調整装置を提供する。
【解決手段】キャンバ角制御装置は、車体に設置されモータ駆動力を出力する駆動部材2と、駆動部材2と連結されるクランク軸に対して偏心したクランクピンを有するクランク部4と、クランクピンに連結される連結部材51と、車体に連結されると共にキャンバ軸を形成するキャンバ部材と、車輪40を回転可能に支持すると共に、鉛直方向の一方側でキャンバ部材に回動可能に支持され、他方側で連結部材51の他端に第2連結部で連結される回動部材と、クランク部4の回転角度を検出するインクリメント式のロータリーエンコーダ6と、クランク部4の回転位置を検出する回転位置検出部60と、回転位置検出部60の検出値に応じてロータリーエンコーダ6の原点を補正する制御部と、を備えることを特徴とする。
(もっと読む)
スタビライザ装置
【課題】 消費動力を低減することができ、アクチュエータの小型化が可能なスタビライザ装置を提供する。
【解決手段】 コントローラ20は、操舵角センサ21で検出した操舵角と車速センサ22で検出した車速とに基づいて、走行車両に働く横加速度を推定演算して予測する。予測された横加速度に基づきFF制御にてモータ目標位置Stを演算する。モータ位置センサ23により検出した電動モータ19の現在位置Siとモータ目標位置Stとの偏差ΔSが不感帯の閾値eの範囲内となるように、電動モータ19の回転位置を制御する。これにより、コントローラ20は、車体が次の挙動を開始する前に可変剛性部4を目標剛性にする制御を開始する目標剛性制御手段を実現するものである。
(もっと読む)
車両制御装置および車両制御方法
【課題】レーン移動動作を行う際に車両の姿勢を安定させることができなかった。
【解決手段】自車両の移動先の目標レーンを示す情報を含む推奨経路情報と、前記自車両が走行している自車走行レーンを示す情報を含む自車位置情報とを取得し、前記自車走行レーンが前記目標レーンと異なる場合に、前記自車両がレーン移動動作を行う予定であることを予測するレーン移動予測手段と、前記自車両がレーン移動動作を行う予定であると予測された場合に、前記自車両の姿勢を安定させるための安定制御を開始させるための開始条件を満たすか否かを判定する開始条件判定手段と、前記開始条件を満たすとき、前記安定制御を開始させる安定制御手段と、を備え、前記開始条件判定手段は、前記自車両がレーン区画線を跨いだ場合に前記開始条件を満たすと判定する。
(もっと読む)
スタビライザ制御装置
【課題】 アクチュエータの駆動に必要なトルクが過大となったときに、アクチュエータを停止させ、動力が無駄に消費されるのを防ぐようにする。
【解決手段】 車体の横加加速度(ロール量)、電動モータ25の回転位置(モータ実位置)から電流制御許可判断部40により電動モータ25の回転に必要なトルクを算定しつつ、この必要トルクがモータの最大トルクを越えているか否かを判断する。電流制御許可判断部40により電動モータ25が回転可能と判断した場合に、モータ位置制御部37から電流制御部38に指令電流を出力する。電動モータ25を回転できないと判断した場合には指令電流の出力を停止し、スタビライザ装置1の保持力により剛性を確保する。これにより、電力が無駄に消費されるような事態を回避し、エネルギ効率を高めるようにする。
(もっと読む)
車両のアライメント調整装置
【課題】サスペンションアームを直接軸方向に変位させて所望の減速比を確保し適切にアライメント調整を行い得るアライメント調整装置を提供する。
【解決手段】サスペンションアームが、ロッド1とこれを軸方向移動可能に支持するハウジング2を具備し、ウォームホイールの回転駆動に応じてハウジングに対しロッドが軸方向に移動する送り螺子機構3と、ウォームホイールに噛合し中心軸がロッドの中心軸に対し直交するウォームギヤ12を有する第1の減速機構10と、ウォームギヤと同軸に接合する平歯車21を有する第2の減速機構20を備え、ウォームギヤの中心軸に対しオフセットした出力軸31を有する電気モータ30を連結する。第1の減速機構10と第2の減速機構10とを、ウォームギヤと平歯車との間で着脱自在に構成することができる。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映した走行特性とすることによりドライバビリティを向上させる。
【解決手段】走行している車両の状態に基づいてパラメータ(指標)を求め、前記車両に搭載されているアクチュエータの制御量をそのパラメータに基づいて決定する車両の制御装置において、前記パラメータに対する前記制御量を複数のアクチュエータ毎に予め設定しておき、前記パラメータが求められた場合にその単一のパラメータに基づいて前記複数のアクチュエータ毎の制御量を求める(ステップS31,S32,S33)とともにその制御量に基づいて各アクチュエータを制御するように構成されている。
(もっと読む)
ダンパ制御装置
【課題】フルリバウンドやフルバンプによる衝撃の発生を抑えるように減衰力可変ダンパを制御するダンパ制御装置を提供することを課題とする。
【解決手段】車体に車輪を支持するサスペンション装置に備わる減衰力可変ダンパ1を制御し、ダンパ変位が所定の閾値を超えたときに、フルリバウンドやフルバンプなどダンパ変位が伸縮の限界に達することを防止するようにダンパの減衰力を設定する第1目標減衰力設定部20aと、ダンパがフルリバウンドしやすい状態、またはダンパがフルバンプしやすい状態となって車両が走行する特定走行状態であることを判定する走行状態判定部21bと、を備えるダンパ制御装置20とする。そして、第1目標減衰力設定部20aは、車両が特定走行状態で走行していると走行状態判定部21bが判定したときに閾値を小さくすることを特徴とする。
(もっと読む)
車両用キャンバ角制御装置
【課題】車輪のキャンバ角の調整速度を適切に制御し、車両の走行安定性を向上させる車両用キャンバ角制御装置を提供する。
【解決手段】状態量取得部61により取得された車両1の状態量及び走行状態取得部により取得された車両1の走行状態に応じて、キャンバ角調整機構4によるキャンバ角を制御する制御部100と、を備え、制御部100は、状態量取得部61により取得された車両1の状態量が所定の安定状態であり、且つ、走行状態取得部により取得された車両1の走行状態が所定の直進状態であると判断される場合に、キャンバ角調整機構4により車輪を第1キャンバ角とし、所定の直進状態で操舵角取得部63の取得する車両1の操舵角が所定の閾値を上回った場合、キャンバ角調整機構4により車輪2を第2キャンバ角とする。
(もっと読む)
車両用キャンバ角制御装置
【課題】 車輪のキャンバ角の調整速度を適切に制御し、車両の走行安定性を向上させる車両用キャンバ角制御装置を提供する。
【解決手段】 車輪2と、車輪2のキャンバ角を調整するキャンバ角調整機構44〜50と、を備えた車両に用いられる車両用キャンバ角制御装置であって、車両1の横加速度を取得する横加速度取得部80bと、横加速度取得部により取得された横加速度が所定の閾値を上回った場合に、キャンバ角調整機構44〜50によるキャンバ角の調整速度を制御する制御部100と、を備えていることを特徴とする。
(もっと読む)
直動機構を備えた装置及びスタビライザ装置
【課題】 小型の直動機構を備えた装置及びスタビライザ装置を提供する。
【解決手段】 ケーシング5とプレート12との間に転がり直動ガイド21を配設する。転がり直動ガイド21は、プレート12の外周側に形成された略コ字形状のプレート側ガイド溝22と、外周側がプレートケース6の廻止め溝6Dに圧入され内周側がプレート側ガイド溝22内に摺動可能に嵌合されたガイド片23と、ガイド片23とプレート側ガイド溝22との間に溝部22A,23Aを介して軸方向に転動可能に設けられた球体24と、球体24をプレート側ガイド溝22とガイド片23との間で転動可能に保持するホルダ25と、プレート側ガイド溝22とガイド片23との間に形成される球体収容空間26内に向けて球体24をホルダ25とリテーナ28の間で付勢するばね27とにより構成する。
(もっと読む)
キャンバ制御装置
【課題】走行安定性を十分に高くすることができるようにする。
【解決手段】車両のボディと、ボディに対して回転自在に配設された複数の車輪と、各車輪のうちの所定の車輪に配設され、車輪にキャンバを付与するためのキャンバ可変機構と、車両がローリングさせられているかどうかによって、ローリング用のキャンバ付与条件が成立したかどうかを判断するキャンバ要否判定処理手段と、車両がローリングさせられていて、ローリング用のキャンバ付与条件が成立したと判断された場合に、キャンバ可変機構を作動させて所定の車輪に負のキャンバを付与するキャンバ付与処理手段とを有する。ローリング用のキャンバ付与条件が成立すると、所定の車輪に負のキャンバが付与されるので、走行安定性を十分に高くすることができる。
(もっと読む)
スタビライザ装置
【課題】 電気系統のフェイル時にも最低限必要な捩り剛性を確保できるようにする。
【解決手段】 ボールアンドランプ機構12のランププレート14をランププレート13に向けて押付ける付勢機構17を、一端側がランププレート14に当接し他端側がプランジャ21のばね受部21Aに当接する主ばね18と、ばね受部21Aと蓋体8との間に設けられプランジャ21を主ばね18とは反対方向に付勢する対向ばね19とから構成する。主ばね18のばね特性が劣化したときにもスタビライザ装置1に最低限必要な捩り剛性を確保するため、制御装置によりプランジャ21の制御基準位置を予め求めておき、電気系統等のフェイル時にはプランジャ21を前記制御基準位置に保持することができるようにする。
(もっと読む)
操舵装置
【課題】操舵フィーリングに対する違和感を運転者に与えることを抑制することができる操舵装置を提供すること。
【解決手段】前輪11側のロール剛性あるいは後輪12側のロール剛性の少なくともいずれか一方を制御でき、制御により前輪側のロール剛性と後輪側のロール剛性とのロール剛性の比を可変に設定可能なロール剛性制御手段を備えた車両1に設けられ、運転者により操舵用の操作部材15に入力される操舵力を補助する補助力を出力し、操舵力と補助力とにより操作部材と機械的に接続された前輪を転舵する操舵装置2であって、補助力は、ロール剛性の比に基づいて変化する。
(もっと読む)
車両の運動制御装置
【課題】過渡操舵(レーンチェンジ挙動)が行われる場合において、運転者へ違和感を与えることなくステア特性制御を確実に実行して車両の安定性を確保すること。
【解決手段】直進状態から、一旋回方向側において急激なステアリングホイールの切り込み・切り戻し操作(第1操舵)が行われ、その後に連続して他旋回方向側においてステアリングホイールの切り込み・切り戻し操作(第2操舵)が行われる場合を想定する。第1操舵中は第1演算特性MP1に基づいてステア特性が調整され、第2操舵中は第2演算特性MP2に基づいてステア特性が調整される。第1操舵中において旋回変化量dJr(操舵角速度)が所定値を超えたとき、第2演算特性MP2がよりアンダステア側の特性に直ちに修正される。即ち、第1操舵に連続する第2操舵が開始される前にて、第2操舵に対応するステア特性制御の目標特性がよりアンダステア側の特性に予め修正される。
(もっと読む)
車両用制御装置
【課題】スラローム走行時におけるキャンバ角の頻繁な切り替わりを防止することができる車両用制御装置を提供すること。
【解決手段】車両が所定の旋回状態であると、車輪のキャンバ角を第1キャンバ角に調整するので、車両の旋回性能の向上を図ることができる。一方、車両が所定の旋回状態ではないと、車輪のキャンバ角第2キャンバ角に調整するので、省燃費性能の向上を図ることができる。この場合、車両が所定の旋回状態ではないと判断される場合に、第1キャンバ角から第2キャンバ角へのキャンバ角の調整を待機するので、車両の旋回状態が絶えず変化するスラローム走行時において、車両が所定の旋回状態でなくなるたびに、キャンバ角調整装置が作動することを回避して、キャンバ角の頻繁な切り替わりを抑制することができる。
(もっと読む)
車両の制御装置
【課題】後輪操舵制御装置とアクティブサスペンション装置とを備えた車両がダブルレーンチェンジ等の速い切り返しが為される際に発生するロールの違和感を抑制する制御装置を提供する。
【解決手段】本発明は、後輪操舵制御装置10とアクティブサスペンション装置6,7とを備えた車両の制御装置12である。本制御装置は、前記車両の横加速度Gy、前輪舵角、後輪舵角、ロール角を含む運動状態量を検出する運動状態量検出手段と、前記横加速度と前記前輪舵角との相関を算出して、予め設定された標準値と比較し、横加速度修正量を算出する横加速度修正量算出手段125と、前記横加速度修正量と前記横加速度とからロール角制御量を算出するロール角制御量算出手段124と、前記ロール角制御量と前記ロール角とから前記アクティブサスペンションのロール角制御量を算出するロール姿勢制御手段126とを備えることを特徴とする。
(もっと読む)
車両用制御装置
【課題】旋回時の操縦安定性を確保しつつ、車両の挙動を安定させることができる車両用制御装置を提供すること。
【解決手段】左右の後輪2RL,2RRの両輪にネガティブキャンバを付与することで、後輪2RL,2RRの横剛性を利用して、旋回時の操縦安定性を確保できる。この場合、左右の後輪2RL,2RRの両輪にネガティブキャンバを付与するので、左の後輪2RLのキャンバスラストと右の後輪2RRのキャンバスラストとを互いに打ち消し合う向きに発生させて、車両1に生じるヨーモーメントを抑制できる。また、左右の後輪2RL,2RRの両輪にネガティブキャンバを付与するので、旋回方向が繰り返し変化するスラローム走行時においても、旋回方向が変化するたびにキャンバ角の調整が頻繁に行われるのを防止できる。よって、旋回時の操縦安定性を確保しつつ、車両1の挙動を安定させることができる。
(もっと読む)
車両用制御装置
【課題】操縦安定性の向上を図ることができる車両用制御装置を提供すること。
【解決手段】横方向状態量判断手段により横方向状態量が第一条件および第二条件を満たすと判断される場合には、第一キャンバ角調整手段によって前輪および後輪のキャンバ角が調整される。前輪および後輪のキャンバ角を調整することで、旋回性能を最大限発揮させて、操縦安定性の向上を図ることができる。一方、第一条件のみを満たすと判断される場合は、前輪または後輪のいずれか一方のキャンバ角を調整することで、不必要なキャンバ角の調整を抑制して車両が不安定な状態になるのを回避しつつ、必要な旋回性能を確保することができる。このように、必要なキャンバ角だけを調整して、車両の操縦安定性の向上を図ることができる。
(もっと読む)
車両用制御装置
【課題】スラローム走行時におけるキャンバ角の頻繁な切り替わりを防止することができる車両用制御装置を提供すること。
【解決手段】左右方向加速度の平均値が閾値を超えていると判断される場合には(S8:No)、所定期間において、左右方向加速度の変動が大きく、車両1の走行履歴が旋回を繰り返すスラローム走行であると推定される。よって、この場合には(S8:No)、車両1はその後もスラローム走行を続ける可能性が高いと判断して、第2キャンバ角へ調整する処理(S9)をスキップして、このキャンバ角制御処理を終了する。これにより、車輪2のキャンバ角を第1キャンバ角に維持することができ、キャンバ角の頻繁な切り替わりを抑制することができる。
(もっと読む)
1 - 20 / 82
[ Back to top ]