
Fターム[3D301AB23]の内容
Fターム[3D301AB23]に分類される特許
1 - 20 / 105
発進補助装置およびこれを搭載した発進補助車両
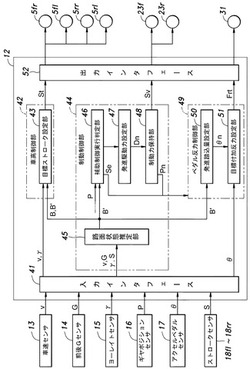
【課題】車高が変化した場合であっても車体の傾斜状態から路面の傾斜状態を適正に推定して確実に発進補助を行う。
【解決手段】ブレーキペダル9に対する操作に応じて制動力を発生するディスクブレーキ8と、車体1の前後加速度G(傾斜状態)を検出する前後Gセンサ14と、前後Gセンサ14の検出結果に基づいて路面の傾斜度合いB’を推定する路面状態推定部45と、路面の傾斜度合いB’に基づいて路面が坂道であると判定された場合、ブレーキペダル9に対する操作の解除後にもディスクブレーキ8に制動力を保持させる発進補助装置11において、エアスプリング5のストロークSを検出するストロークセンサ18を更に備え、路面状態推定部45が、前後加速度Gに基づく路面(車体)の傾斜度合いBをストロークSを用いて補正することで路面の傾斜度合いB’を正確に推定できるようにする。
(もっと読む)
車両用エアサスペンション制御装置

【課題】車両の前輪と後輪が接地する路面の高さが左右で異なるうねり路を確実に判定することができ、且つ圧縮エアの消費を抑制し得る車両用エアサスペンション制御装置を提供する。
【解決手段】車両1前部における左右の車高を検出するフロント車高センサ11と、車両1後部における左右の車高12aを検出するリヤ車高センサ12とを設け、フロントレベリングバルブ8とリヤエアスプリング5とをつなぐエア管路7途中にカットバルブ13を設け、通常モード中に、車両1がうねり路にいるか否かを判断し、該車両1がうねり路にいる場合には、前記カットバルブ13を閉じる制御信号13aを出力し、前記車両1前部における左右それぞれのレベリング制御を強制的に休止させるコントローラ14を設ける。
(もっと読む)
車両用エアサスペンション制御装置
【課題】車両用エアサスペンション制御装置を提供する。
【解決手段】車両1前部における左右のフロントエアスプリング4の圧力11aを検出するフロント圧力センサ11と、車両1後部における左右のリヤエアスプリング5の圧力12aを検出するリヤ圧力センサ12とを設け、フロントレベリングバルブ8とリヤエアスプリング5とをつなぐエア管路7途中にカットバルブ13を設け、通常モード中に、車両1がうねり路にいるか否かを判断し、該車両1がうねり路にいる場合には、前記カットバルブ13を閉じる制御信号13aを出力し、前記車両1前部における左右それぞれのレベリング制御を強制的に休止させるコントローラ14を設ける。
(もっと読む)
車両用エアサスペンション制御装置
【課題】車両の前輪と後輪が接地する路面の高さが左右で異なるうねり路においても、車両の左右一方の前輪が浮き上がったりすることを防止しつつ、クラウチング制御を確実に行うことができ、且つ圧縮エアの消費を抑制し得、更にコストダウンを図り得る車両用エアサスペンション制御装置を提供する。
【解決手段】クラウチング制御が行われていない通常モード中に、車両1前部における左右の車高11aの差の絶対値が予め設定された閾値以上で、且つ、車両1前部における左右の車高11aの差と圧力センサ18で検出される車両1後部における左右のリヤエアスプリング5の圧力18aの差との積が負となる場合に、車両1がうねり路にいると判断し、コントローラ13からカットバルブ16,17を閉じる制御信号16a,17aを出力し、車両1後部における左右それぞれのレベリング制御を強制的に休止させる。
(もっと読む)
車体傾斜装置
【課題】車体傾斜装置において、従来技術のレベル調整制御用の自動高さ調整弁を十分生かしながら、迅速な車体傾斜制御を行うことである。
【解決手段】 車体傾斜装置30は、空気バネ22,23に対応して設けられる個別傾斜部40,41と、制御部100とを含んで構成される。個別傾斜部40は、制御部100から与えられる高さ指令値と、リンク機構24から得られる車高値との間の偏差である高さ偏差を用いて、センサ付き給排気切替弁42と、大容量制御弁80を駆動して空気バネ22に対し十分な給排気を行うことができる装置である。センサ付き給排気切替弁42は、リンク機構24の傾斜角度に基いて機械的に駆動され、大容量制御弁80は、センサ付き給排気切替弁42の変位センサの電気信号に基いて制御弁駆動回路部70で生成される駆動信号で電気的に駆動される。
(もっと読む)
車高調整装置
【課題】車高を所望の範囲内に効率良く収めることが可能な車高調整装置の提供。
【解決手段】車高調整制御部は、左右のサスペンションのそれぞれについて、検出変位と検出内圧とロール剛性係数とを用いて、左右のエアサスペンションが共に目標変位に設定された車高調整完了状態での内圧を目標内圧(PLb,PRb)として算出し、検出内圧と検出変位とを乗算した検出乗算値(PL_now×ZL_now,PR_now×ZR_now)が、目標内圧と目標変位とを乗算した目標乗算値(PLb×Zb,PRb×Zb)に近づくように、電磁バルブを制御する。
(もっと読む)
苗移植機
【課題】後輪のローリングアームによる左右支持レベル調整機能を確保しつつ、前端操作部材による機体操作を要する急傾斜の登行行程における機体姿勢の安定化を図ることができる苗移植機を提供する。
【解決手段】苗移植機は、前輪10と後輪11とを備えた走行車体2と、その後部で昇降可能な移植部4と、機体前端の前端操作部材6と、左右の後輪11を機体支持点18aより後方で上下動作可能に支持するローリングアーム18とを備えて構成され、上記ローリングアーム18の上下動作を許容する縦案内溝72とその支持レベルを上限位置に保持する横案内溝73とをそれぞれ形成したローリングガイド71を設け、前端操作部材6を傾動動作可能に軸支してその傾動位置で両ローリングガイド71を弾発付勢し、上限支持レベル位置に達したローリングアーム18を横案内溝73に保持する連結部材63を設けたものである。
(もっと読む)
揺動式車両の自立操作装置
【課題】簡易な構造で揺動式車両の揺動角を任意に可変とし、走行状況等に応じて車両を所望の揺動姿勢で保持させる操作を行うことを可能とする。
【解決手段】前側車体部と後側車体部とを連結し、後側車体部を前側車体部に対して左右方向に揺動可能に連結するジョイントケース30を備えた自動三輪車において、ジョイントケース30の揺動軸32にプーリー41を固定し、ステップフロア13に乗員の足によって操作される左右一対の足操作子42,43を設け、プーリー41と足操作子42,43とをケーブル44,45で連結し、足操作子42,43から付与される乗員の踏力をプーリー41を介して揺動軸32に伝達することにより、後側車体部に対する前側車体部の揺動角を任意に可変とする。
(もっと読む)
原動機付四輪車両
【課題】幅方向に一名しか収容できず、運転者の保護構造に統合されたシャーシと一体化した状態で作られた運転席、及びシャーシと二つの前車輪の同時傾斜により、水平との関係において傾斜した地面上及び/又はカーブ内で車両を平衡化させる手段を有し、四つの車輪を提供する。
【解決手段】四輪型原動機付車両1は、停止時及び低速時に自動的に介入する傾斜ブロック手段を有する。この車両は、停止時に車両が転倒しないような最大値に前記傾斜を制限するための手段を有している。車両は、幅が狭いので狭い場所を走行でき、また、狭い車体幅にもかかわらず、停止時、低速走行、高速度走行、カーブ内走行、段差内走行のいずれにおいても、安定を保つことができる。
(もっと読む)
装輪戦闘車両の車高制御機構
【課題】装輪戦闘車両の俯仰角度を、実質的に大きくする。
【解決手段】装輪戦闘車両は、車体本体2上に砲台4が旋回可能に取り付けられ、砲台4には俯仰可能に砲身3が備えられている。車体本体2の右側及び左側には、懸架脚20〜90が備えられている。懸架脚20〜90は、車輪21〜91や、油気圧式ばねタンパ23〜93を有しており、油気圧式ばねダンパ23〜93の伸縮により車高調整がされる。砲身3の仰角が大きくなっていくときには、砲身3の向きがより上向きになるように、懸架脚20〜90を伸縮調整して車体本体2を傾斜させ、実質的に砲身の仰角を大きくし、砲身3の俯角が大きくなっていくときには、砲身3の向きがより下向きになるように、懸架脚20〜90を伸縮調整して車体本体2を傾斜させ、実質的に砲身の俯角を大きくする。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映した走行特性とすることによりドライバビリティを向上させる。
【解決手段】走行している車両の状態に基づいてパラメータ(指標)を求め、前記車両に搭載されているアクチュエータの制御量をそのパラメータに基づいて決定する車両の制御装置において、前記パラメータに対する前記制御量を複数のアクチュエータ毎に予め設定しておき、前記パラメータが求められた場合にその単一のパラメータに基づいて前記複数のアクチュエータ毎の制御量を求める(ステップS31,S32,S33)とともにその制御量に基づいて各アクチュエータを制御するように構成されている。
(もっと読む)
作業機械
【課題】下部走行体に4つ以上の上下位置を自由に調整可能な走行ユニットを備えた作業機械において、走行安定性を向上させるとともに、作業時の操作性・居住性を維持できる。
【解決手段】作業機械はサスペンション機構91〜93とサスペンション機構作動切替手段94,97,102とを備える。走行時は、サスペンション機構作動ON/OFFスイッチ97をONにすることにより、サスペンション機構が自動的にクローラユニット224aを接地させ、走行安定性を向上させることができる。フロント作業時は、サスペンション機構作動ON/OFFスイッチ97をOFFにすることにより、パイロットチェックバルブ92a,93aへのパイロット圧は遮断され、パイロットチェックバルブ92a,93aはアキュームレータ91aからの圧油の流れを許容せず、サスペンション機構が不作動となり、フロント作業時の操作性・居住性を維持できる。
(もっと読む)
移動装置
【課題】階段を昇降することも、平面上の全方向に移動することも可能な移動装置を提供する。
【解決手段】基体1に取付けられた車輪支持ユニット2を鉛直軸回りに回転させて、複数の大車輪7の水平な大車輪回転軸11を平面視で直交2軸方向に設定し、大車輪回転軸11に付与された駆動力を小車輪14の小車輪回転軸15に伝達すれば、小車輪回転軸15が移動方向と直交する小車輪14は小車輪回転軸15回りに回転され、小車輪回転軸15が移動方向と直交しない小車輪14ではフリーローラ16が自在に回転して平面上の全方向への移動が可能となり、複数の大車輪回転軸11を平面視で全て平行になるように設定し、階段の段差に小車輪14が当接してその回転が規制されると、大車輪7(大車輪本体12)が駆動力で回転し、当該大車輪7に取付けられている他の小車輪14が階段の段差を乗り越えて階段の昇降が可能となる。
(もっと読む)
車両用制御装置
【課題】車両の旋回特性を制御できる車両用制御装置を提供すること。
【解決手段】車両用制御装置100によれば、状態量取得手段により車両の状態量が取得され、その車両の状態量に基づいてスタビリティファクタ演算手段により車両のスタビリティファクタが演算される。演算されたスタビリティファクタと別途定める基準スタビリティファクタとが比較手段により比較され、その比較結果に基づいて第1キャンバ角調整手段によりキャンバ角調整装置44が駆動され、前輪および後輪の少なくとも一つのキャンバ角が調整される。スタビリティファクタは車両の旋回特性を表すため、スタビリティファクタに基づいて車輪のキャンバ角を調整することにより車両の旋回特性を制御できる。
(もっと読む)
フォークリフト
【課題】車体の地上高さや駆動輪の輪重等を簡単に調整できるようにする。
【解決手段】駆動輪10を上下に揺動するためのドライブシリンダ11と、補助輪20を上下に揺動するためのキャスタシリンダ21と、ドライブシリンダ11の第1室とキャスタシリンダ21の第1室とを接続する第1管路31と、ドライブシリンダ11の第2室とキャスタシリンダ21の第2室とを接続する第2管路32と、作動油ポンプ81と制御弁73,74,75との間を第1管路31に接続する第3管路91と、第3管路91を開閉する切換バルブ90とを備え、制御弁73,74,75は、アンロード状態のときに絞り回路が構成されるようになっており、センサー94の検出結果に基づいて、制御弁73,74,75がアンロード状態のときに、作動油ポンプ81を駆動して切換バルブ90を開く調整動作を行う。
(もっと読む)
マップデータを使用する乗物ESCシステムのための方法及びシステム
【課題】乗物用の改良型電子安定性制御システムを提供する。
【解決手段】乗物用の電子安定性制御(ESC)システムが開示される。電子制御ユニット(ECU)は、乗物のブレーキ及びスロットルの動作に変更を加えることで、意図された乗物方向及び/又はヨーレートと、実際の乗物方向及び/又はヨーレートとの間の差を減少することにより、乗物の横滑りを減少するようにプログラムされる。ESCシステムは、車輪速度センサ、ハンドル位置センサ、ヨーレートセンサ、及び横方向加速度センサから入力を受け取る。又、ESCシステムは、乗物が位置している道路の特性を少なくとも指示する入力も受け取り、乗物が位置する道路は、マップデータベースを使用するポジショニングシステムから決定され、又、特性は、マップデータベースから決定される。
(もっと読む)
車両用制御装置
【課題】バッテリの残存容量の低下やバッテリの劣化を抑制すると共に、車両の走行安定性を確保できる車両用制御装置を提供すること。
【解決手段】バッテリ状態判断手段によりバッテリが充電不足であるか又は劣化しているか判断される。一方、車輪のキャンバ角が絶対値が大きくなるように調整されているかキャンバ判断手段により判断される。判断の結果、車輪のキャンバ角が絶対値が大きくなるように調整され、且つ、バッテリが充電不足である又は劣化している場合に、キャンバ維持手段により車輪のキャンバ角が維持される。これにより、キャンバ角の調整が繰り返されることを防止して電力消費量を抑制し、バッテリの残存容量の低下やバッテリの劣化を抑制できる。さらに、車輪のキャンバ角が維持されるので、キャンバ角を調整するタイミングが遅れるということがなく、車両の走行安定性を確保できる。
(もっと読む)
車両用制御装置
【課題】車両の走行安定性を確保すると共に、バッテリの残存容量の低下やバッテリの劣化を抑制する車両用制御装置を提供すること。
【解決手段】バッテリ状態判断手段によりバッテリが充電不足であるか又は劣化しているか判断される。一方、走行状態判断手段により車両が所定の直進状態であるか判断される。判断の結果、車両の走行状態が所定の直進状態である場合に、バッテリが充電不足である又は劣化している場合は、通常モード調整手段により車輪のキャンバ角が調整される場合よりも遅いタイミングで、バッテリ低下モード調整手段によってキャンバ角調整装置が駆動され、車輪のキャンバ角が絶対値が大きくなるように調整される。これにより、車両の走行安定性を確保できると共に、キャンバ角調整装置の駆動タイミングを遅らせることで、キャンバ角調整装置の駆動頻度を減らして電力消費量を抑制できる。
(もっと読む)
車両用制御装置
【課題】タイヤの偏磨耗を抑制して、タイヤの寿命を向上させる車両用制御装置を提供すること。
【解決手段】車両用制御装置によれば、車両の状態量が所定の条件を満たすと判断される場合に、キャンバ角調整装置が駆動され、前輪および後輪の少なくとも一つにネガティブキャンバが付与される。一方、水平面に対する車両の前後方向の傾きが所定の傾き以上であると判断される場合に、キャンバ角調整装置が駆動され、重力方向の下側に位置する前輪または後輪のキャンバ角が、付与されるネガティブキャンバのキャンバ角より絶対値が小さくなるように調整される。その結果、坂道において、平坦路に比べて接地荷重が増加する側のタイヤの接地面積を増加させることができ、タイヤの偏磨耗を抑制してタイヤの寿命を向上させる。
(もっと読む)
サスペンション装置
【課題】 凹凸路面走行時におけるバネ上変位伝達比の低減および、勾配変化路面走行時におけるストッパ当たりの防止、ショック感の低減を両立したサスペンション装置を提供すること。
【解決手段】 凹凸路面を走行する場合に、修正アクティブ制御力fbfr*,fbfl*によってバネ上部材の振動が抑えられ、バネ上変位伝達比が低減される。また、勾配変化路面を走行する場合、修正ストローク減衰制御力fsfr*,fsfl*により、早期に路面からの入力がバネ上部材に伝達され、路面入力のピーク値が小さくなる。その結果、ショック感が低減される。また、車両が勾配変化路面を走行している場合に、ストローク変位量が大きくなると、ストローク減衰制御が支配的となり、電磁式ショックアブソーバ装置の伸縮動作に対する抵抗力が増加する。抵抗力の増加によってストッパ当たりの発生が効果的に防止される。
(もっと読む)
1 - 20 / 105
[ Back to top ]