
Fターム[3D301DA29]の内容
車体懸架装置 (72,824) | 構成要素 (13,859) | アクチュエータ(車重を支えるもの) (507) | 電磁アクチュエータ (176)
Fターム[3D301DA29]に分類される特許
1 - 20 / 176
車両用懸架装置
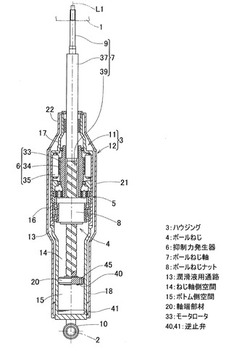
【課題】 ボールねじ軸など潤滑を必要とする部品に、潤滑液を安定して供給することができる車両用懸架装置を提供する。
【解決手段】 この車両用懸架装置は、ボールねじ機構と電磁モータ式の抑制力発生器6を利用して減衰力を発生させる装置である。この車両用懸架装置は、ボールねじ4の外周を囲んで配置されボールねじ4を支持するハウジング3と、ボールねじ軸7の一端に設けられ、ハウジング3内の空間をねじ軸側空間14とボトム側空間15とに分割する軸端部材20と、この軸端部材20に設けられ、ボールねじ軸7の上昇時に開放し、ねじ軸側空間14内に介在する潤滑液をボトム側空間15へ送る逆止弁40と、ハウジング3に設けられ、ねじ軸側空間14とボトム側空間15とに連通して潤滑液の通路となる潤滑液用通路13とを有する。
(もっと読む)
緩衝器

【課題】減衰力特性のヒステリシスを低減して、狙い通りの減衰力を発生することが可能な緩衝器を提供することである。
【解決手段】本発明の課題解決手段は、シリンダ1と、当該シリンダ1内に摺動自在に挿入されるピストン2と、当該ピストン2を両側に設けた一対の作動室R1,R2と、上記シリンダ1内に移動自在に挿入されて一端が上記ピストン2に連結されるピストンロッド3と、移動可能であって移動することで一方の作動室R1,R2の容積を変更する隔壁部材4と、当該隔壁部材4を附勢して上記一方の作動室R2を加圧する附勢要素5とを備えた緩衝器Dにおいて、上記隔壁部材4に一方の作動室R2を加減圧する方向へ推力を与えるアクチュエータ6を備えたので、作動室R2の圧力をコントロールでき、減衰力特性におけるヒステリシスを低減することができる。
(もっと読む)
電磁サスペンション
【課題】円筒形リニアモータの配線の信頼性を向上させた電磁サスペンションを提供する。
【解決手段】固定子2の外周側にコイル6を配置するとともに可動子3の内周側に永久磁石19を配置したリニアモータを採用して、第1ロッド4と第2ロッド23との間の隙間部27に配線12を配した。これにより、配線12と第2ロッド23の接触が回避されて、配線12は保護される。その結果、電磁サスペンション装置の電気系の信頼性を確保することができる。
(もっと読む)
車両運動制御システム
【課題】車輪特殊配置車両の実用性を向上させる車両運動制御システムを提供する。
【解決手段】左右輪14の各々に対応して設けられた距離変更装置を制御してそれらの各々の動作量に差を設けることで車体を傾斜させる場合に、(i)実現させるべき車体の傾斜の程度に基づいて目標動作量差ΔLを決定し、(ii)増加させる方の距離変更装置の動作量ΔLUPと減少させる方の距離変更装置の動作量ΔLDWとへの目標動作量差ΔLの配分を決定し、(iii)その配分に基づいて2つの距離変更装置の各々の目標動作量を決定する。そのことにより、車体を傾斜させる際の車体の重心位置,左右輪と前後輪との荷重配分等を変更することが可能である。
(もっと読む)
サスペンション装置
【課題】 サスペンション装置の大型化を抑制しつつ電磁アクチュエータのフェイルセーフ機能を設ける。
【解決手段】 電磁アクチュエータ30は、電動モータ31とボールネジ機構32とを備える。電動モータ31は、円筒状のロータ310を備え、このロータ310はボールネジナット322に連結される。ボールネジナット322と螺合するボールネジ軸321は、ロータ310の中空部に隙間をあけて挿通される。ロータ310とボールネジ軸321との隙間には粘性油40が封入される。バネ上部材とバネ下部材とが上下方向に相対運動すると、ロータ310とボールネジ軸321との間に封入された粘性油に粘性せん断力が発生し、この粘性せん断力が、バネ上部材とバネ下部材との相対運動を減衰させる。
(もっと読む)
圧電アクチュエータ
【課題】変位量の変更や調整が簡単であって、量産性を向上でき、製造コストを低減することが可能な圧電アクチュエータを提供する。
【解決手段】環状であって周方向に上方へ凸となる湾曲部2と下方へ凸となる湾曲部3とが交互に波打つように現れるように形成された湾曲部2,3を有するウェーブリング1と、当該ウェーブリング1の湾曲部2,3に設けた圧電素子4とを備え、湾曲部2,3は、圧電素子4の伸長によって平坦となるように撓み、圧電素子4の収縮によって湾曲を深めるように撓むことにより、推力の出力方向をウェーブリング1の軸方向とする。
(もっと読む)
サスペンション装置
【課題】ストローク長と車両への搭載性をともに満足させることが可能なサスペンション装置を提供することである。
【解決手段】上記した目的を達成するため、本発明の課題解決手段は、直動部材1と回転部材2とを有して直動部材1の直線運動を回転部材2の回転運動に変換する運動変換機構Tと、上記回転部材2に連結されるロータ3を有するモータMと、上記直動部材1に連結される流体圧ダンパDとを備えたサスペンション装置Sにおいて、流体圧ダンパDをロータリダンパとして、ダンパロータ11のハウジング10に対する回転の際にハウジング10に対するダンパロータ11の回転を抑制する減衰力を発揮するよう設定され、ダンパロータ11を直動部材1に当該直動部材1の直線運動により回転するよう連結したことを特徴とする。
(もっと読む)
車両用電動ダンパ装置
【課題】車輪の上下運動を最適に減衰させて車両の乗り心地を向上させることができるとともに、早々に熱に変換されないで、しかも、常時回生させることができる車両用電動ダンパ装置とする。
【解決手段】車両用電動ダンパ装置は、車体に対する車輪の相対的な上下運動を回転運動に変換して電動モータ35L,35Rを回転させることにより上下運動を減衰させるようにし、また、車輪の上下運動を減衰させるための減衰力を電動モータが発生する。車両用電動ダンパ装置は、車輪が上下方向に変位する変位速度を算出する変位速度検出部と、変位速度に基づいて電動モータの目標駆動電流を設定する駆動電流設定部と、目標駆動電流に基づいて電動モータを駆動制御するモータ駆動部106L,106Rとを有している。
(もっと読む)
サスペンション装置
【課題】 液圧ダンパ装置40のストッパ当たりの発生頻度が低減されたサスペンション装置を提供すること。
【解決手段】 サスペンション本体10に追従上限周波数を越える周波数の振動が入力されたときに、液圧ダンパ装置40とバウンドストッパ47との間の間隔Hが拡がるように電動アクチュエータ30が伸縮作動する。このため追従上限周波数よりも大きな周波数の振動によって液圧ダンパ装置40が電動アクチュエータ30に対して移動した場合でも、液圧ダンパ装置40とバウンドストッパ47との間の間隔Hが拡げられているので液圧ダンパ装置40がバウンドストッパ47に当たり難くなる。よって、ストッパ当たりの発生頻度が減少し、ストッパ当たりの発生による乗り心地の悪化が抑えられるとともに、バウンドストッパ47の耐久性も向上する。
(もっと読む)
サスペンション制御装置
【課題】車体姿勢を目標姿勢に追従させる。
【解決手段】車体の目標姿勢と、この目標姿勢を実現するために必要な目標制御量とを設定し(ステップS2、S3)、目標姿勢と実際の車体姿勢との姿勢偏差をフィードバック項として算出し(ステップS4)、この姿勢偏差に基づいて、車体姿勢を目標姿勢に一致させるために必要な補正量を算出する(ステップS5)。そして、補正量に応じて目標制御量を補正し(ステップS6)、補正した目標制御量に応じてアクチュエータを駆動制御することで、サスペンションストロークの制御を行う(ステップS7)。
(もっと読む)
車両のサスペンション装置
【課題】 電磁アクチュエータの電動モータ31の過熱を防止する。
【解決手段】 モータフリー制御部53は、モータ温度Tmが過熱防止開始温度Tmaを超えていると判断した場合には、相間開放用リレーユニット54の各リレーR1,R2,R3をオフ状態にする。これにより、電動モータ31の過熱が防止される。この場合、エアバネ制御部150は、給排装置80からエアバネ装置20に圧縮空気を供給して、エアチャンバ26の内圧を上昇させて、エアバネ装置20のバネ定数を増加させる。これにより、電動モータ31が減衰力を発生できなくても、ストッパ当たりが低減される。
(もっと読む)
車両のサスペンション装置
【課題】 エアバネ装置と、アクティブ制御を行う電磁アクチュエータとを備えたサスペンション装置において、実車高hと目標車高h*とのずれを小さくして、乗り心地の低下を抑制する。
【解決手段】 車高偏差演算部121は、目標車高h*から実車高hを減算することで車高偏差Δhoを演算する。ローパスフィルタ処理部122は、車高偏差Δhoに含まれる高周波ノイズ成分を除去した車高偏差Δhを演算する。モータ力補正量演算部123は、車高偏差Δhに車高補償ゲインKhを乗じることによりモータ力補正量Δfhを演算する。目標モータ力補正演算部124は、目標モータ力演算部116から出力された目標モータ力fmotor*に、モータ力補正量演算部123から出力されたモータ力補正量Δfhを加算して、最終的な目標モータ力fmotor*を求める。
(もっと読む)
電力回生装置
【課題】電力回生装置において、構成部品を適切に保護する。
【解決手段】電動アクティブサスペンション装置10は、電動モータ15と、電動モータ15に駆動電力を供給すると共に、電動モータ15で発生した回生電力を受けるモータ駆動装置14と、NiH蓄電池18からの電力を変圧してモータ駆動装置14に供給すると共に、モータ駆動装置14からの回生電力を変圧してNiH蓄電池18に蓄電するDC−DCコンバータ12とを備える。モータ駆動装置14は、回生電力がDC−DCコンバータ12に伝達されるのを防止する電力伝達防止機構を備える。DC−DCコンバータ12は、供給される駆動電圧が第1所定値未満の場合、動作を停止するよう構成されている。モータ駆動装置14は、供給される駆動電圧が第2所定値未満の場合、電力伝達防止機構が作動するよう構成されている。第1所定値は、第2所定値よりも小さい値に設定される。
(もっと読む)
サスペンション装置
【課題】 高周波振動入力時にダンパ装置が所望の減衰力を発生するように構成されたサスペンション装置を提供すること。
【解決手段】 本発明のサスペンション装置は、モータ31の回転角速度Vmを取得する状態量演算部51と、状態量演算部51により取得された回転角速度Vmに基づいて、回転角速度Vmの高周波成分に対する減衰力(モータ減衰力fmの高周波成分)fm_filtを演算する減衰力演算部(524,525)と、モータ31が減衰力演算部により演算された減衰力を発生するように、モータ31が出力すべき目標制御力fを演算する目標制御力演算部526と、を備える。そして、目標制御力演算部526により演算された目標制御力fに基づいてモータ31を制御する。
(もっと読む)
サスペンション装置
【課題】実用性の高いサスペンション装置を提供する。
【解決手段】サスペンション装置10は、基端部が車体に回転可能に連結されるとともに、先端部がステアリングナックル18に回転可能に連結された回動アーム50と、基端部が車体に回転可能に連結された第1ロッド66と、回動アームと並ぶようにしてかつその回動アームの延びる方向における変位が許容された状態で、回動アームに支持され、基端部が第1ロッドの先端部と回転可能に連結された第2ロッドと、基端部が中間ロッドの先端部に回動可能に連結され、先端部がステアリングナックル18に回転可能に連結された第3ロッドとを備え、回動アームと第2ロッドとの上下方向における間隔が、回動アームの基端部と第1ロッドの基端部との上下方向の間隔および回動アームの先端部と第3ロッドの先端部との上下方向の間隔よりも小さくする。
(もっと読む)
サスペンション装置
【課題】 エアバネ装置のバネ定数の振幅依存性による乗り心地の低下を良好に抑制し、かつ、電磁アクチュエータの振動や作動音の発生を低減する。
【解決手段】 エアバネ装置の小振幅振動時に、バネ上部材が上方向に動作している場合には電磁アクチュエータの制御量を増加補正し、バネ上部材が下方向に動作している場合には電磁アクチュエータの制御量を低減補正する。この場合、バネ上部材が上方向に動作している場合であっても、電磁アクチュエータが推進力を発生している状況であれば、電磁アクチュエータの制御量の増加補正を行わないようにする。また、バネ上部材が下方向に動作している場合であっても、電磁アクチュエータが減衰力を発生している状況であれば、電磁アクチュエータの制御量の低減補正を行わないようにする。
(もっと読む)
サスペンション装置
【課題】 悪路走行時にバネ下関連制御量の位相遅れを低減する。
【解決手段】 周期設定部170は、バネ下加速度センサ62の出力する検出信号G1の変化率の大きさ|G1’|が基準値Th1より大きく、かつ、バネ下上下加速度の大きさ|G1|が基準値Th2よりも大きいときに、悪路走行時であると判定して、バネ上減衰制御力演算部110の演算周期Tbを長くし、バネ下減衰制御力演算部120、慣性力演算部130、制振制御力演算部140、目標モータ力演算部150の演算周期Twを短くする。また、通信部160の通信周期Tsも短くする。これにより、マイクロコンピュータの高スペック化を図らなくても、慣性補償制御を適切に行うことができる。
(もっと読む)
車体傾斜装置
【課題】車体の姿勢の安定性を向上させる。
【解決手段】車両の停止状態において、人の降車動作の開始が検出された場合(S3)には、降車中リーン角制御が行われ、車体が安定な姿勢に制御される。降車中リーン角制御は、人の降車動作中、継続して行われる。そして、人の降車動作の終了が検出された場合(S5)に、降車中リーン角制御が終了させられる。このように、乗り物から人が降車する間、車体が安定な姿勢に制御されるため、車体の安定性を向上させることができる。
(もっと読む)
サスペンション装置
【課題】 悪路走行時にバネ下上下加速度信号のローパスフィルタ処理による位相遅れを低減する。
【解決手段】 フィルタ特性変更部160は、バネ下加速度センサ62の出力する検出信号G1の変化率の大きさ|G1’|が基準値Th1より大きく、かつ、バネ下上下加速度の大きさ|G1|が基準値Th2よりも大きいときに、悪路走行時であると判定して、バネ下ローパスフィルタ処理部121のカットオフ周波数fcを通常よりも高いfchighに設定する。これにより、バネ下上下加速度x1”の位相遅れが抑制される。従って、慣性補償制御を適切に行うことができる。
(もっと読む)
車両
【課題】車体の姿勢が変化するときであっても横方向の加速度成分がゼロとなり、車体及び乗員には車体の縦方向軸線と平行な方向の力が作用するので、車体の安定を維持することができ、また、旋回性能を向上させることができるとともに、乗員が違和感を感じることがなく、乗り心地がよく、安定した走行状態を実現することができるようにする。
【解決手段】互いに連結された操舵部及び駆動部を備える車体と、操舵部又は駆動部を旋回方向に傾斜させる傾斜用アクチュエータ装置と、車体に作用する横加速度を直接的又は間接的に検出する複数のセンサと、車体の要求旋回量を検出する要求旋回量検出手段と、車速を検出する車速検出手段とを有し、横加速度に基づくフィードバック制御を行うとともに、要求旋回量及び車速に基づくフィードフォワード制御を行って車体の傾斜を制御する。
(もっと読む)
1 - 20 / 176
[ Back to top ]