
Fターム[3D301EA38]の内容
車体懸架装置 (72,824) | 入力信号 (10,935) | 車両の姿勢、状態 (6,036) | コーナリングフォース(CF)、コーナリングパワー(CP)、セルフアライニングトルク(SAT) (46)
Fターム[3D301EA38]に分類される特許
1 - 20 / 46
車体すべり角推定装置および車両姿勢制御装置
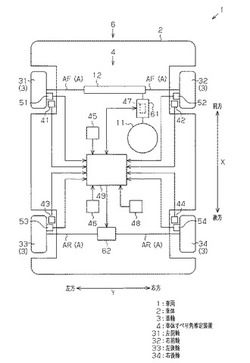
【課題】車体の横すべり角を精度良く推定することのできる車体すべり角推定装置および車両姿勢制御装置を提供する。
【解決手段】車体すべり角推定装置4は、前輪31,32および後輪33,34が設けられた車体2の横すべり角を推定する。この車体すべり角推定装置4は、前輪31,32の舵角と、前輪31,32に対して作用する横力である前輪横力と、後輪33,34に対して作用する横力である後輪横力と、車体2の重心と前輪31,32の距離と、車体2の重心と後輪33,34の距離と、車体2のヨーレートと、車速とに基づいて、車体2の横すべり角を推定する。
(もっと読む)
車両用制御装置

【課題】車両の旋回特性を制御できる車両用制御装置を提供すること。
【解決手段】車両用制御装置100によれば、状態量取得手段により車両の状態量が取得され、その車両の状態量に基づいてスタビリティファクタ演算手段により車両のスタビリティファクタが演算される。演算されたスタビリティファクタと別途定める基準スタビリティファクタとが比較手段により比較され、その比較結果に基づいて第1キャンバ角調整手段によりキャンバ角調整装置44が駆動され、前輪および後輪の少なくとも一つのキャンバ角が調整される。スタビリティファクタは車両の旋回特性を表すため、スタビリティファクタに基づいて車輪のキャンバ角を調整することにより車両の旋回特性を制御できる。
(もっと読む)
二重空気ばね構成用の閉ループ圧力制御
【課題】二重空気ばね構成用の閉ループ圧力制御を提供する。
【解決手段】アクティブエアサスペンションシステムは、ピストンエアバッグと、ピストンエアバッグを囲んで取り付けられた主エアバッグとを有して、力およびばね定数可変の二重空気ばね構成を形成する空気ばねアセンブリを含む。エアサスペンションシステムは、ピストンエアバッグ内の圧力を閉ループの態様で正確に制御するように構成される。ピストン圧力を連続的に制御することにより、制御装置入力に応じてばね定数またはばね力を正確に増減させる。
(もっと読む)
車両挙動制御装置
【課題】操舵制御装置によってロール挙動が大きくなることを防ぐ車両挙動制御装置を提供する。
【解決手段】後輪操舵制御のような操舵制御手段22の制御値から、当該制御手段に起因する車体の横加速度を推定し、この横加速度からロールモーメントを推定し、その推定結果に基づいてロール抑制手段4,30のフィードフォワード制御を行う。このため、操舵制御に伴うロールを遅滞なく抑制し、運転フィーリングを向上させることができる。
(もっと読む)
同時クランプによって車輪グリップ係数を求める方法
本発明は、所与の路面上を走行している車両の車輪のグリップ状態を表す特性値を求める方法であって、次のステップを有し、即ち、車両の同一アクスルの2本の車輪に所与の同時旋回角変化を与えるステップを有し、旋回角変化は、2本の車輪について等しい大きさを有するが互いに逆方向であり、2本の車輪のうちの少なくとも1本について上記特性量を測定するステップを有することを特徴とする方法に関する。 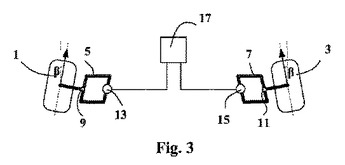 (もっと読む)
(もっと読む)
車両制御装置
【課題】車両の旋回性を高くすることができるようにする。
【解決手段】ボディ11と、ボディ11に対して回転自在に配設された車輪WLF、WRF、WLB、WRBと、所定の車輪WLB、WRBとボディ11との間に配設され、所定の車輪WLB、WRBにキャンバ角を付与するための車輪駆動部31、32と、車両の操舵を表す操舵指標を検出する操舵指標検出部と、操舵指標に基づいて車両が旋回しているかどうかを判断する旋回判断処理手段と、車両が旋回しているときに、所定の車輪にキャンバ角を付与するキャンバ角付与処理手段とを有する。車両が旋回しているときに、所定の車輪にキャンバ角が付与されるので、横力を発生させ、コーナリングフォースを発生させることができ、旋回性を高くすることができる。
(もっと読む)
運転操作装置
【課題】運転操作と姿勢維持とをより両立させやすくなる運転操作装置を得る。
【解決手段】モビリティ2を、脚部(脛部Ds)で動作量を制御する操作部としてのペダル12から脚部(脛部Ds)へ作用する操作反力の力線ベクトルV1の延長線と、運転者Dの体幹軸Taに対応する軸とを略交差させるように構成した。これにより、運転者Dの身体の回転運動を誘発する操作反力による回転モーメントの発生を抑制でき、操作反力に伴う身体のねじれの発生を抑制して安定的に上体姿勢を維持しやすくなるため、運転操作と姿勢維持とをより両立させやすくなる。
(もっと読む)
旋回制御装置及び旋回制御方法
【課題】車両を旋回させる際に消費されるエネルギーを小さくすることができ、車両の旋回時の応答性を必要に応じて高くすることができるようにする。
【解決手段】ボディと、車輪WLF、WRF、WLB、WRBと、車輪にキャンバ角を付与する車輪駆動部と、運転者が車両を旋回させる際に必要とする旋回の要求度を表す要求ヨーレートを算出する要求ヨーレート算出処理手段と、要求ヨーレートが基準値以上であるかどうかを判断する要求ヨーレート判定処理手段と、要求ヨーレートが基準値以上である場合に、車輪にスリップ角を付与するスリップ角付与処理手段と、要求ヨーレートが基準値より小さい場合に、車輪にキャンバ角を付与するキャンバ角付与処理手段とを有する。要求ヨーレートが基準値以上である場合に、スリップ角を大きくすることができ、要求ヨーレートが基準値より小さい場合に、コーナリング抵抗を小さくすることができる。
(もっと読む)
旋回制御装置及び旋回制御方法
【課題】車両を旋回させる際に消費されるエネルギーを小さくすることができ、ヨーレートを十分に大きくすることができるようにする。
【解決手段】車両のボディと、車輪WLF、WRF、WLB、WRBと、車輪にキャンバ角を付与する車輪駆動部と、車両を操舵するために操作される操舵部材と、操舵部材の操作量を検出する操作量検出部と、検出された操作量に基づいて、車両が旋回させられていると判断されると、車輪のうちの後輪に、操舵方向と反対側にタイヤを傾ける方向のキャンバ角を付与するキャンバ角付与処理手段とを有する。車両が旋回させられていると判断されると、車輪のうちの後輪に、操舵方向と反対側にタイヤを傾ける方向のキャンバ角が付与されるので、ヨーレートを十分に大きくすることができる。
(もっと読む)
減衰力可変ダンパの制御装置および制御方法
【課題】 旋回走行時における乗り心地の向上やタイヤ横滑りの抑制等を実現する減衰力可変ダンパの制御装置および制御方法を提供する。
【解決手段】 ロール演算制御部56は、横加速度Gyに基づき、ステップS26で現在の旋回方向が左であるか否かを判定する。そして、ロール演算制御部56は、ステップS26の判定がYesであれば、ステップS27で、ロール減衰力ベース値Drbaseをそのまま旋回内側前輪(左前輪3fl)側に対するロール目標減衰力Drtflとし、ステップS28で、所定の低減係数Ki(例えば、0.1〜0.2)をロール減衰力ベース値Drbaseに乗じた値を他の車輪3fr〜3rr側に対するロール目標減衰力Drtfr〜Drtrrとした後、ステップS29で各ロール目標減衰力Drtfl〜Drtrrを出力する。
(もっと読む)
タイヤ位置可変車両
【課題】 走行中のタイヤ位置の変更によりホイールベースやトレッドベースが変更された場合であっても、要求された運動状態を実現できるタイヤ位置可変車両を提供する。
【解決手段】 駆動力制御部430は、車両の走行中にタイヤユニット300の位置が移動した場合、要求外力と移動タイヤユニット位置情報とに基づいて、駆動力変更後の各タイヤの駆動力の2乗の和が最小となるように、各タイヤの駆動力を変更する。
(もっと読む)
タイヤ位置可変車両およびタイヤ力変化抑制方法
【課題】 タイヤ移動に伴うタイヤ発生力の変動を抑制し、運転者の運転操作に応じた車両挙動を実現できるタイヤ位置可変車両およびタイヤ力変化抑制方法を提供する。
【解決手段】 タイヤユニット300を移動させる際、タイヤ390の移動に伴う車両挙動変化を抑制するように、転舵アクチュエータ340を制御するタイヤ力変化抑制装置510を備える。
(もっと読む)
車輪位置可変車両および車輪位置制御方法
【課題】 操縦安定性の向上と利便性の向上とを共に実現することができる車輪位置可変車両および車輪位置制御方法を提供する。
【解決手段】 各車輪ユニット300を車体100に対して車幅方向の任意の位置に移動させるトレッド&ホイールベース変更アクチュエータ350と、各車輪390の輪荷重が目標輪荷重となるようにトレッド&ホイールベース変更アクチュエータ350に対し車輪位置の変更を指令する輪荷重制御装置510と、左右輪の一方と車体の車幅方向中心位置との距離と、左右輪の他方と車幅方向中心位置との距離とを異ならせることにより、車体の車幅方向位置が目標車体位置となるようにトレッド&ホイールベース変更アクチュエータ350に対し車輪位置の変更を指令するキャビン位置制御装置520と、を備える。
(もっと読む)
車両の旋回挙動制御方法および装置
【課題】旋回挙動制御用左右輪間制駆動力差に起因した左右駆動輪の同方向転動変位によるヨーモーメントの影響を排除して目標ヨーモーメントを正確に達成可能にする。
【解決手段】旋回挙動制御用の左右輪間制駆動力差(制駆動力モーメント)により車両に直接付与されるヨーモーメント、および、左右輪間制駆動力差(制駆動力モーメント)に起因した左右輪の転動変位によるヨーモーメントとの合計ヨーモーメントと、左右輪間制駆動力差(制駆動力モーメント)との関係を求めておき、これを用いて横軸上の合計ヨーモーメントに目標ヨーモーメントMzを当てはめることにより、目標ヨーモーメントMzを実現するのに必要な目標制駆動力モーメント(左右輪間目標制駆動力差)を求め、これを基に左右輪の制駆動力指令値をそれぞれ求めて旋回挙動制御に資する。
(もっと読む)
車両用ロール抑制システム
【課題】実用性の高い車両用ロール抑制システムを提供する。
【解決手段】モータ力に依拠してロール抑制力を制御可能に発生させるロール抑制装置が前輪側と後輪側とに対応して1対設けられたシステムにおいて、1対のロール抑制装置に対応して設けられた前輪側バッテリ27Fおよび後輪側バッテリ27Rと、前輪側バッテリから前輪側ロール抑制装置の有する電磁モータ60Fへの電力供給のための前輪側電力供給線98F、および、後輪側バッテリから後輪側ロール抑制装置の有する電磁モータ60Rへの電力供給のための後輪側電力供給線98Rとを備え、供給線接続装置100,102によって2本の電力供給線を電気的に接続可能に構成される。このような構成のシステムによれば、電磁モータに供給すべき電力が不足しても、1対のロール抑制装置の一方が発生させるロール抑制力を大きくし、車両の旋回特性の適切化を図ることができる。
(もっと読む)
車両の減衰力制御装置
【課題】 修正ピッチモーメントの算出精度を向上するとともに演算負荷を低減する。
【解決手段】 車体の目標ピッチ角θp*を、車体の実ロール角θrを用いて多項式近似した関数により付与する。修正ピッチモーメントΔMpは、目標ピッチ角を2回微分した値θp*ddと実ピッチ角を2回微分した値θpddとの差分値(θp*dd−θpdd)、および、目標ピッチ角θp*と実ピッチ角θpとの差分値(θp*−θp)に基づいて計算され、その計算にあたって、ばね上加速度センサの検出値を代数計算して得たロール角加速度θrdd、ピッチ角加速度θpddと、ロール角加速度の1階積分値,2階積分値と、ピッチ角加速度の2階積分値を用いることにより、微分演算処理を行わないようにした。
(もっと読む)
タイヤ挙動演算方法
【課題】車両旋回時において実測値と整合がとれるタイヤ挙動の高精度な演算方法を提供する。
【解決手段】ある態様のタイヤ挙動演算においては、タイヤ発生力とタイヤ挙動とが繰り返し演算され、その収束値がタイヤ挙動の演算結果として出力される。すなわち、タイヤ発生力およびタイヤ挙動の各演算処理において各演算結果が互いにフィードバックされる。この繰り返し演算の過程でタイヤに加わる力のつり合いにより、各演算値は収束していく。
(もっと読む)
サスペンション装置
【課題】旋回初期のヨー応答性及び定常旋回時の安定性を向上したサスペンション装置を提供する。
【解決手段】前後の弾性体マウント20を介して車体に装着されるリアサブフレーム10、車輪ハブ支持体30、及び、前後のサスペンションアーム40,50を備えるサスペンション装置を、リアサブフレームの後側サスペンションアームとの接続部14は、前側サスペンションアームとの接続部13よりもリアサブフレームのロールに伴う横変位が大きく、前側サスペンションアームは、後側サスペンションアームより車輪ハブ支持体の支持剛性が低く、初期領域ではリアサブフレームのロール運動によるトー変化量が前後サスペンションアームの車輪ハブ支持体の支持剛性差によるトー変化量よりも大きく、定常旋回領域では前後サスペンションアームの支持剛性差によるトー変化量がリアサブフレームのロール運動によるトー変化量よりも大きい構成とする。
(もっと読む)
リアサブフレームの支持構造、及び、フロントサブフレームの支持構造
【課題】旋回初期のヨー応答性を向上するとともに定常旋回時の安定性を向上したリアサブフレームの支持構造等を提供する
【解決手段】車両の前後方向に離間して配置された前側弾性体マウント20、及び、後側弾性体マウント30を介して車体に装着されるとともに、後輪用サスペンション装置のサスペンションアームが接続されるリアサブフレーム10の支持構造を、後側弾性体マウント30は、サスペンションアームからリアサブフレーム10に入力される横力SFに対するバネ定数が、横力の増加に応じて増加する非線形特性を有し、横力が小さい初期領域では横力に起因する変位量が前側弾性体マウントよりも大きく、初期領域よりも横力が大きい定常旋回領域では変位量が前側弾性体マウントよりも小さくなる構成とする。
(もっと読む)
車両用制御装置
【課題】高グリップ性と低燃費との両立を図ることができる車両用制御装置を提供すること。
【解決手段】車輪2のキャンバー角がネガティブキャンバーに調整されると、第1トレッド21の接地圧が増加されると共に、第2トレッド22の接地圧が減少される。これにより、高グリップ性が発揮される。一方、車輪2のキャンバー角がポジティブキャンバーに調整されると、第1トレッド21の接地圧が減少されると共に、第2トレッド22の接地圧が増加される。これにより、低転がり抵抗となり、省燃費が達成される。このように、車輪2のキャンバー角を調整することで、高グリップ性と省燃費との背反する性能の両立を図ることができる。
(もっと読む)
1 - 20 / 46
[ Back to top ]