
Fターム[3D301EA39]の内容
Fターム[3D301EA39]の下位に属するFターム
車輪接地荷重 (233)
Fターム[3D301EA39]に分類される特許
1 - 20 / 154
減衰力調整式シリンダ装置
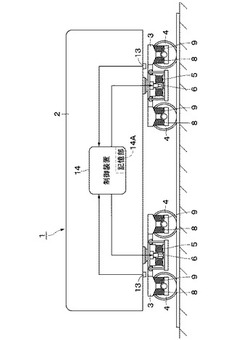
【課題】 異常を検出するときの誤検出を減らすことができる減衰力調整式シリンダ装置を提供する。
【解決手段】 減衰力可変ダンパ6は、台車3と車体2との間に連結される。減衰力可変ダンパ6には、減衰力特性を調整するアクチュエータ7が搭載されると共に、減衰力可変ダンパ6から車体2に作用する力を検出する力センサ12が内蔵されている。加速度センサ13は、車体2に設けられ、上,下方向の車体加速度を検出する。制御装置14は、正常状態と判定したときは、力センサ12と加速度センサ13の検出信号を用いて減衰力可変ダンパ6の減衰力特性を制御する。一方、制御装置14は、センサ故障状態と判定したときは、力センサ12からの検出信号を用いずに、加速度センサ13の検出信号を用いて減衰力可変ダンパ6の減衰力特性を制御する。
(もっと読む)
車両のロール角推定方法及び装置

【課題】任意の1つの時点でのサスペンションの変位及び内圧値を検出するだけで、自動車高調整非実行時のロール角を求めることが可能な方法及び装置の提供。
【解決手段】左右サスペンションの任意の時点において測定された変位及び内圧値から、ロール角と左右サスペンションによるロールモーメントとをそれぞれ算出し、左右サスペンションの測定内圧平均値に対応する荷重−変位特性を、自動車高調整が行われなかった場合の左右サスペンションに共通の荷重−変位特性として選択し、算出したロール角及びロールモーメントと、選択した荷重−変位特性と、サスペンションを装着した車両固有の値として変位及び内圧値の測定前に記憶されたロール剛性係数とに基づき、自動車高調整が行われなかった場合のロール角を求める。
(もっと読む)
車両のロール角推定方法及び装置
【課題】サスペンションの変動状態や積荷の状態変化に因らず、自動車高調整非実行時のロール角を精度良く求めることが可能な方法及び装置の提供。
【解決手段】異なる2つの時点での変位及び内圧値(第1及び第2の変位と第1及び第2の内圧値)を用いて車高調整非実行時のロール角φ2esを求める第1の方法と、1つの時点での変位及び内圧値(第2の変位と第2の内圧値)と、変位及び内圧値の測定前に記憶された所定のロール剛性係数Kφ13newとを用いて車高調整非実行時のロール角φ2esを求める第2の方法とを、サスペンションの変動状態や積荷の状態変化に応じて適宜選択して用いる。
(もっと読む)
車両のロール角推定方法及び装置
【課題】任意の1つの時点でのサスペンションの変位及び内圧値を検出するだけで、自動車高調整非実行時のロール角を所望の精度で求めることが可能な方法及び装置の提供。
【解決手段】測定された第1及び第2の変位並びに第1及び第2の内圧値から、車両固有のロール剛性係数Kφ13を算出し、その後の任意の時点で測定された変位及び内圧値と上記算出したロール剛性係数Kφ13(Kφ13new)とに基づき、自動車高調整が行われなかった場合のロール角φ2esを求める。
(もっと読む)
車輪位置可変車両
【課題】 簡単な構成で、車両の利便性と車両の挙動安定性の向上を図るとともに、より自由な車両挙動を実現できる車輪位置可変車両を提供する。
【解決手段】 各車輪390に設けられ、車体100に対する車輪の向きを変更する転舵アクチュエータ340と、各車輪390と車体100との間にそれぞれ設けられ、各車輪390を所定の軌道(車輪ユニット移動軌道200)上の任意の位置に移動させるトレッド&ホイールベース変更アクチュエータ350と、走行状態に応じた目標ジオメトリに基づいて、トレッド&ホイールベース変更アクチュエータ350に対し車輪位置変更指令を出力するコントローラ500と、を備え、コントローラ500は、加速度方向側の車輪から重心位置までの距離を、加速度方向と反対側の車輪から重心位置までの距離に対して長くなるように設定する。
(もっと読む)
ダンパ装置
【課題】伸縮振動を現在していなくても、長さを伸ばすことが可能なダンパ装置を提供する。
【解決手段】シリンダ2の内部をピストン3で第1流体室2aおよび第2流体室2bに区画し減衰力を発生させるダンパ装置1において、一端がピストン3に連結され他端がシリンダ2の上端側の外部に延在し内部に第3流体室4aが設けられたピストンロッド4と、一端がシリンダ2の下端側に固定され他端が第3流体室4aに配置され軸方向に貫通する流体通路5aが設けられ第3流体室4aに対して振動すると吸引と吐出を繰り返すポンピングをするポンプロッド5と、その吐出の際に作動液12が流入して内圧が高くなる第1チャンバ8と、その吸引の際に作動液が流出して内圧が低くなる第2チャンバ9と、第2流体室2bと第1チャンバ8とで連通させた状態と連通させていない状態とを切り換える第1切換手段10とを有する。
(もっと読む)
車体傾動制御装置、車体傾動制御方法
【課題】車体を傾斜させる際の輪荷重変動を補償し、旋回走行時の安定性を一層向上させる。
【解決手段】左右輪荷重変動算出部43により、車両の旋回走行状態及び目標傾斜角に応じて、左右輪荷重変動を推定し、限界値補正量算出部44により、車両の旋回走行状態に応じて、左右輪荷重変動時の物理的限界輪荷重に対する限界値補正量を算出する。そして、傾斜角制限部45により、物理的限界輪荷重から限界値補正量を減じて制御用限界輪荷重を算出し、左右輪荷重変動が制御用限界輪荷重を超えないように、目標傾斜角に対して制限処理を行う。左右輪荷重変動推定部43では、車両ダイナミクスモデル及びアクチュエータダイナミクスモデルに従い、左右輪荷重変動を予測する。
(もっと読む)
外力検出が可能な防振装置
【課題】入力荷重の高精度な検出を、充分な耐久性および実用性をもって実現することが可能とされた、新規な構造の外力検出が可能な防振装置を提供することにある。
【解決手段】誘電性の弾性材からなる誘電体層34の両面に対して導電性の弾性材からなる一対の電極膜36a,36bを設けた静電容量型センサ32を用い、静電容量型センサ32の一方の端部を第1の取付部材12に固定すると共に他方の端部を第2の取付部材14に固定して、外力作用による本体ゴム弾性体16の弾性変形に際して静電容量型センサ32に本体ゴム弾性体16から独立した引張変形が生ぜしめられるようにした。
(もっと読む)
トラック用リヤサスペンション
【課題】リーフスプリングの折損を簡単な構成で検出することを可能にしつつ、リーフスプリング折損の早期発見が図れるトラック用リヤサスペンションを提供する。
【解決手段】車体フレーム11にリーフスプリング45を介して車軸13が弾性自在に支持され、リーフスプリング45は、車体フレーム11に両端を支持されたメインスプリング23と、このメインスプリング23が荷重を受けて所定量撓んだときに荷重を受けるヘルパースプリング26とから構成され、このヘルパースプリング26が車体に設けられたヘルパーブラケット27,27に当接又は離間可能に支持されるトラック用リヤサスペンション20において、ヘルパーブラケット27は、ヘルパースプリング26に押圧されて荷重を検出する圧電素子68が設けられている。
(もっと読む)
ダンパ制御装置
【課題】フルリバウンドやフルバンプによる衝撃の発生を抑えるように減衰力可変ダンパを制御するダンパ制御装置を提供することを課題とする。
【解決手段】車体に車輪を支持するサスペンション装置に備わる減衰力可変ダンパ1を制御し、ダンパ変位が所定の閾値を超えたときに、フルリバウンドやフルバンプなどダンパ変位が伸縮の限界に達することを防止するようにダンパの減衰力を設定する第1目標減衰力設定部20aと、ダンパがフルリバウンドしやすい状態、またはダンパがフルバンプしやすい状態となって車両が走行する特定走行状態であることを判定する走行状態判定部21bと、を備えるダンパ制御装置20とする。そして、第1目標減衰力設定部20aは、車両が特定走行状態で走行していると走行状態判定部21bが判定したときに閾値を小さくすることを特徴とする。
(もっと読む)
車両のエアサスペンションのバネ特性の補正方法及び補正装置
【課題】車両のエアサスペンション(エアバネ)のバネ特性を適正に補正する。
【解決手段】エアバネに所定の基準荷重が作用した際の所定の基準車高におけるエアバネの実際の内圧値を検出し、エアバネの設計上のバネ特性を、基準荷重が作用した際の基準車高におけるエアバネの設計上の内圧値と実際の内圧値とを用いて補正する。
(もっと読む)
サスペンション装置
【課題】車両の車高、姿勢を制御するときの動作を抑え、消費動力を小さくして効率のよい制御を行う。
【解決手段】サスペンション装置1を、車体102に取付けられたハウジング2と、ハウジング2から回転可能に突出し、突出端側が径方向に延びてサスペンションアーム103に接続されたアーム部10と、アーム部10の回転運動を直線運動に変換するボールアンドランプ機構と、ボールアンドランプ機構による直線運動に付勢力を与える付勢機構と、付勢機構による付勢力を調整する付勢力調整機構とにより構成する。この場合、付勢力調整機構は、プランジャとねじ部材とによるねじ機構として形成する。これにより、電動モータでねじ部材を回転駆動しない限り、プランジャを軸方向に固定できるから、電動モータを効率よく制御することができる。
(もっと読む)
車高調整装置
【課題】車体におけるバネ下重量の増加を抑制する小型軽量化した車高調整装置を提供する。
【解決手段】車体とバネ下部材との間に介挿されるスプリングを当該スプリングの一端側から伸縮させて車体の車高を調整する車高調整装置であって、車高調整装置は、車体又はバネ下部材に固定され、ステータを保持するステータ保持部材と、ステータ保持部材の外周に沿って回転可能に設けられ、スプリングの外径よりも大径のロータを保持する円筒形状のロータ保持部材と、ロータ保持部材の内周面とボールネジ機構を構成する外周面とスプリングと当接するスプリングシートとを有するロアーリングとを備えるようにした。
(もっと読む)
セミアクティブショックアブソーバ制御方法
【課題】セミアクティブショックアブソーバ制御システムを提供すること。
【解決手段】例えば実時間調整可能なショックアブソーバシステムなどのバネ質量系のためのセミアクティブ制御手法が提供される。この手法は、システムパラメータ及びユーザ定義可能な又は前もってセットされた入力に基づき複数の動作ゾーンを定義するステップを備える。また、この手法は、非慣性バネ質量系応答と、系に作用する多次元の力と、運動の極値での系の動作を正確に定義するための加速度境界計算とを明らかにするためのステップを備える。この手法は、概して、複数のバルブ制御信号を生成すること、そのバルブ制御信号の中から選択すること、および選択された制御信号を閉ループのフィードバック系におけるバルブに加えてバネ質量系におけるエネルギーを調節することに方向づけられる。
(もっと読む)
移動体の運動制御用センサシステム及び移動体の運動制御用センサシステムの設置方法
【課題】車両等の移動体のばね下に加速度センサ等のセンサを設置することで、路面からの反力に対する検出情報の遅れを防ぐと共に、車両運動に伴うセンサ検出軸の、静止状態の車両基準とした座標軸に対するずれを抑制し、センサの検出軸方向の検出精度を高く保つことが可能な移動体の運動制御用センサシステム及び移動体の運動制御用センサシステムの設置方法を提供する。
【解決手段】本発明における移動体の運動制御用システムは、車両等の移動体で用いられる移動体の運動制御用センサシステムであって、1軸の検出軸を有する単軸の物理量センサを備え、前記単軸の物理量センサが、前記移動体が備える懸架装置のばね下に取付けられ、前記単軸の物理量センサの検出軸と、前記懸架装置が備える振動緩衝部材の動作軸とが略平行であることを特徴とする。
(もっと読む)
車両用制御装置
【課題】高グリップ性と低燃費との両立を図ることができる制御装置及び車両を提供すること。
【解決手段】車輪2のキャンバー角がネガティブキャンバーに調整されると、第1トレッド21の接地圧が増加されると共に、第2トレッド22の接地圧が減少される。これにより、高グリップ性が発揮される。一方、車輪2のキャンバー角がポジティブキャンバーに調整されると、第1トレッド21の接地圧が減少されると共に、第2トレッド22の接地圧が増加される。これにより、低転がり抵抗となり、省燃費が達成される。このように、車輪2のキャンバー角を調整することで、高グリップ性と省燃費との背反する性能の両立を図ることができる。
(もっと読む)
車両用制御装置
【課題】高グリップ性と低燃費との両立を図ることができる制御装置及び車両を提供すること。
【解決手段】車輪2のキャンバー角がネガティブキャンバーに調整されると、第1トレッド21の接地圧が増加されると共に、第2トレッド22の接地圧が減少される。これにより、高グリップ性が発揮される。一方、車輪2のキャンバー角がポジティブキャンバーに調整されると、第1トレッド21の接地圧が減少されると共に、第2トレッド22の接地圧が増加される。これにより、低転がり抵抗となり、省燃費が達成される。このように、車輪2のキャンバー角を調整することで、高グリップ性と省燃費との背反する性能の両立を図ることができる。
(もっと読む)
搬送台車および編成搬送用台車設備ならびに編成搬送方法
【課題】搬送台車における支持モードの選択の自由度が高く、編成搬送にも適した搬送台車を提供する。
【解決手段】左右前の支持ブロックFL,FRのサスペンションシリンダ24FL,24FRを接続する前部バイパス管41と、左右後の支持ブロックRL,RRのサスペンションシリンダ24RL,24RRを接続する後部バイパス管43と、前後左の支持ブロックFL,RLのサスペンションシリンダ24FL,24RLを接続する左部バイパス管45と、前後右の支持ブロックFR,RRのサスペンションシリンダ24FR,24RRを接続する右部バイパス管47と、これらすべてのバイパス管をそれぞれ連通、遮断可能な2方向制御弁42,44,46,48とを設け、2方向制御弁42,44,46,48を操作することにより、4点支持、前左右分割の3点支持、後左右分割の3点支持、前後の2点支持、左右の2点支持、1点支持の各モードで荷を支持可能に構成した。
(もっと読む)
セミ・アクティブ・トー力コンプライアンス制御機能を有するリヤサスペンション
【課題】フェールセーフ及び制御ロジックに関する開発を重点的に行うことなく、且つ、制御力をそれほど必要とすることなく、車両の応答性を変化させることができるシステムを提供する。
【解決手段】多数の制御アームを有するサスペンションにおいて、特定のサスペンション制御アームは、横荷重を受けた車輪で起こるトー変化の範囲に対応する一定の範囲の軸方向剛性レベルを提供するように設計されている。詳しくは、セミ・アクティブ装置は、所定のサスペンション制御アームに配置されており、該装置は、横荷重を受けた際に所望の量のトー変化を起こすように剛性が変化する。このような構成のサスペンションを自動車の後方の車軸に適用した場合、最小の制御入力エネルギー及び堅牢なフェールセーフ動作で広範囲な動作状態においても、操作性及び安定性を向上させることができる。
(もっと読む)
減衰力制御装置
【課題】 実車両のバネ上質量特性に見合った減衰係数の制御則に基づいてサスペンション装置の減衰力を制御することができる減衰力制御装置を提供すること。
【解決手段】 仮想バネ上部材の前輪側バネ上質量MF_Nと仮想質量関連制御定数KM_Nとに基づいて求められる前輪側バネ上質量MFと前輪側制御定数KM_Fとの相関関係式(eq.5)に基づいて、前輪側バネ上質量MFの変化に応じて変化する前輪側制御定数KM_F(第1制御定数)が計算される。また、仮想バネ上部材の後輪側バネ上質量MRと後輪側制御定数KM_Rとの相関関係式(eq.9)に基づいて、後輪側バネ上質量MRの変化に応じて変化する後輪側制御定数KM_R(第2制御定数)が計算される。そして、前輪側制御定数KM_Fと後輪側制御定数KM_Rに基づいて質量関連制御定数KMが計算される。
(もっと読む)
1 - 20 / 154
[ Back to top ]