
Fターム[3D301EA65]の内容
Fターム[3D301EA65]に分類される特許
1 - 20 / 25
サスペンションシステム
【課題】車両の走行状態に拘らず、最適な乗り心地及び走行安定性を実現することが可能なサスペンションシステムを提供する。
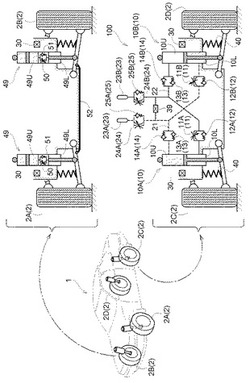
【解決手段】サスペンションシステム100は、上側シリンダ室10Uと、下側シリンダ室10Lと、当該下側シリンダ室10Lの開口部の開口面積を調整する可変バルブ11と、を有し、車両1が有する一対の車輪2に組み込まれた一方の減衰力制御シリンダ10Aの上側シリンダ室10Uと他方の減衰力制御シリンダ10Bの下側シリンダ室10Lとを連通する第1連通路21と、一方の減衰力制御シリンダ10Aの下側シリンダ室10Lと他方の減衰力制御シリンダ10Bの上側シリンダ室10Uとを連通する第2連通路22と、第1連通路21と第2連通路22との夫々に設けられ、減衰力制御シリンダ10A、10Bの動作に応じてオイルを貯留及び排出する一対のオイル受部23と、を備える。
(もっと読む)
電磁サスペンション

【課題】磁極位置の検出を非接触で行うことができ、しかも、コストを低減することができる電磁サスペンションを提供する。
【解決手段】可動子7の永久磁石9の磁極位置を検出する磁極位置検出装置11を、固定子2に設ける。この磁極位置検出装置11は、固定子2に取付けられる被検出板12と、該被検出板12の先端側に取付けられる磁極位置検出用磁石13と、被検出板12の基端側に取付けられる歪センサ14とにより構成する。歪センサ14は、磁極位置検出用磁石13と可動子7の永久磁石9との吸引反発力により生じる被検出板12の曲げ歪を検出する。これにより、磁極位置検出装置11は、この曲げ歪に対応する永久磁石9の磁極位置を検出することができる。
(もっと読む)
サスペンション制御装置
【課題】車体と車輪との間の上,下方向の相対速度が0付近で頻繁に変化する場合でも、車両の振動を緩衝することができ、振動や異音の発生を抑えることができる車両用サスペンション制御装置を提供する。
【解決手段】ばね上加速度センサ8、ばね下加速度センサ9、減算器13および積分器12によって、車体1と車輪2との間の上,下方向の相対速度V2を検出する。そして、検出された相対速度V2を、相対速度補正部15で補正し、補正相対速度V2ofsを出力する。ここで、相対速度補正部15は、相対速度V2が高周波のときには、補正相対速度V2ofsとして所定の値(例えば、直前の制御周期の補正相対速度V2ofs_Z)を出力する。相対速度V2が低周波のときには、補正相対速度V2ofsは、相対速度V2の符号(正負)の切換りに応じてその符号(正負)が切換わるようにする。
(もっと読む)
緩衝器およびサスペンション装置
【課題】 アクティブサスペンションと同等に減衰力の発生範囲を広げることができ、省エネルギで小型化を図ることができるようにする。
【解決手段】 油圧シリンダ1で発生する減衰力を可変に制御する減衰力発生機構11を、油圧シリンダ1のジョイント9とポート10との間を外筒2の外側で連通させる連絡管路12と、連絡管路12の途中に設けられたパイロットオリフィス13およびポンプ14と、パイロットオリフィス13およびポンプ14を迂回して連絡管路12に接続されたバイパス管路15と、バイパス管路15の途中に設けられたリリーフ弁16等とにより構成する。コントローラ22からの制御信号でモータ20を駆動しポンプ14を正,逆方向に回転させる。リリーフ弁16のリリーフ設定圧を可変に制御し、油圧シリンダ1をアクティブサスペンションとして作動させることができる。
(もっと読む)
車両用制御装置
【課題】車両が周期的な路面を走行中に、車輪が路面の凸部を一段飛ばしで走行しているかを判断し、ショックアブソーバの減衰力を適正値に変更し、車両が路面から受ける荷重を低減する車両用制御装置を提供すること。
【解決手段】路面が左右の車輪で同位相の周期的な凹部と凸部とを含む形状であるかを判断する左右輪路面形状判定装置と、左右の車輪が路面の凸部を一段飛ばしで走行しているかを判断する走行状態判定装置と、ショックアブソーバの減衰力の適正値を演算する演算装置とを有し、左右輪路面形状判定装置が路面の形状が左右の車輪で同位相の周期的な凹部と凸部とを含む形状であると判断し、走行状態判定装置が路面の凸部を一段飛ばしで走行していると判断するときに、演算装置が演算する適正値にショックアブソーバの減衰力を変更する。
(もっと読む)
マップデータを使用する乗物ESCシステムのための方法及びシステム
【課題】乗物用の改良型電子安定性制御システムを提供する。
【解決手段】乗物用の電子安定性制御(ESC)システムが開示される。電子制御ユニット(ECU)は、乗物のブレーキ及びスロットルの動作に変更を加えることで、意図された乗物方向及び/又はヨーレートと、実際の乗物方向及び/又はヨーレートとの間の差を減少することにより、乗物の横滑りを減少するようにプログラムされる。ESCシステムは、車輪速度センサ、ハンドル位置センサ、ヨーレートセンサ、及び横方向加速度センサから入力を受け取る。又、ESCシステムは、乗物が位置している道路の特性を少なくとも指示する入力も受け取り、乗物が位置する道路は、マップデータベースを使用するポジショニングシステムから決定され、又、特性は、マップデータベースから決定される。
(もっと読む)
車両制御装置
【課題】よりドライバーの心理状態を反映したエコ運転及び快適を実現しることができる車両制御装置を提供すること。
【解決手段】本発明による車両制御装置1は、ドライバーの笑顔状態を含む心理状態を推定する推定手段201aと、推定手段201aにより推定された心理状態が笑顔状態である場合に、車両の制御内容を省燃費及び快適に対応させて変更する変更手段202bとを含むことを特徴とする。
(もっと読む)
車両制御装置
【課題】運転者の旋回意思を判定し、旋回に必要な制御を早期に開始可能とする車両制御装置を提供する。
【解決手段】車輪の偏向時に車輪が路面から受ける反力トルクに基づいて運転者の旋回意思を検出する旋回意思検出器2と、車両の旋回運動を司るアクチュエータ4を制御するブレーキ制御器3とを備え、ブレーキ制御器3は、旋回意思検出器2の出力に基づき、アクチュエータ4の駆動を制御することにより、車輪の偏向時に路面から受ける反力トルクから運転者の旋回意思を検出し、運転者のハンドル操作もしくは車両状態量が発生する以前から制御を開始し、制御を早期のタイミングで実施する。
(もっと読む)
自動車の車台制御方法、ならびに該方法を実施する装置
本発明は、車体を担持する少なくとも一つの車輪縣架機構を有し、該車輪縣架機構少なくとも一つの減衰器を備え、該減衰器は硬さが調整可能な引張りステージと、硬さが調整可能な圧縮ステージを有する自動車の車台制御方法および車台制御装置に関するものであって、所定の車体運動によって形成された減衰器の圧縮負荷のために圧縮ステージの硬さが変化され、とりわけ高められ、所定の車体運動によって形成された後続の引張り負荷のために引張りステージの硬さが付加的に変化され、とりわけ高められ、または所定の車体運動によって形成された減衰器の引張り負荷のために、引張りステージの硬さが変化され、とりわけ高められ、引き続き所定の車体運動によって形成された圧縮負荷のために引張りステージの硬さが付加的に変化され、とりわけ高められる。 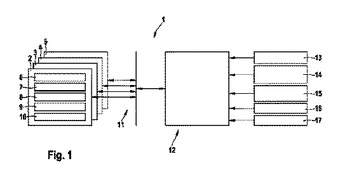 (もっと読む)
(もっと読む)
走行状況報知装置
【課題】 運転操作や路面状態を運転者に適切にフィードバックする。
【解決手段】 報知信号生成部24は、ステップS21で各ダンパ4の駆動電流Idrの平均値(平均駆動電流)Idaを算出した後、ステップS22で平均駆動電流Idaの値が所定の第1報知判定閾値Ith1を上回ったか否かを判定する。自動車Vが急旋回や急加減速してステップS22の判定Yesになると、報知信号生成部24は、ステップS24で平均駆動電流Idaに所定の第1ゲインを乗じて振動報知信号Sbを生成した後、ステップS25で振動報知信号Sbに基づいて両バイブレータ15,17を駆動する。これにより、運転者は、アクセルペダルPaやブレーキペダルPbを介して足裏に振動を感じ、急激なステアリング操作やアクセル/ブレーキ操作を行ったことを認識できる。
(もっと読む)
減衰力発生装置およびサスペンション装置
【課題】ビスカスカップリングの減衰力特性を推定して、所期の減衰力を発生する減衰力発生装置を実現する。
【解決手段】電源220は、DCモータ210に電力を供給して、ケース体12とシャフト20を第1の回転方向に相対回転させ、車輪と車体の相対距離を変化させる。第1推定手段は、電源220よりDCモータ210に電力を供給して、車輪と車体の相対距離を変化させるときにDCモータ210にかかる第1抗力を推定する。第2推定手段は、電力供給を停止したあとに、ケース体12とシャフト20が第2の回転方向に相対回転するときにDCモータ210に発生する第2抗力を推定する。第3推定手段は、第1抗力と第2抗力から、ビスカスカップリング100が発生する減衰力を導出し、減衰力特性を推定する。
(もっと読む)
輪荷重推定装置
【課題】減衰力発生手段による抗力の影響を低減または除外して、車両重量を推定する技術を提供する。
【解決手段】輪荷重推定装置は、車輪側部材に連結する第1伝達部材と車体側部材に連結する第2伝達部材とが相対回転することにより車輪と車体の間に減衰力を発生させる減衰力発生手段を備える。DCモータ210は、第1伝達部材と第2伝達部材を相対回転させて、車輪と車体の相対距離を変化させる。電源220は、DCモータ210に電力を供給して、第1伝達部材と第2伝達部材を第1の回転方向に相対回転させる。制御回路300は、電力供給手段によりモータに電力を供給して、車輪と車体の相対距離を変化させるときの第1抗力を推定し、また電力供給手段による電力供給を停止したあとに、第1伝達部材と第2伝達部材が第2の回転方向に相対回転するときの第2抗力を推定する。制御回路300は、第1抗力と第2抗力から、輪荷重を推定する。
(もっと読む)
ショックアブソーバにおける適用のためのインテリジェント連続監視システム
本発明は、自動車又は必要としている任意の種類の機械において使用されるシ
ョックアブソーバのための連続監視システムに関しており、これは、ショックアブソーバ
が通常の動作の間に評価されることを可能にする。これは本質的に、全ての必要な構成要
素が、単一の回路1又はいくつかの集積化された相互接続回路にてショックアブソーバ自
身に組み込まれていることによって特徴付けられ、これらには、ショックアブソーバの識
別、特徴、及び自己診断の能力に関する必要な情報を車両の又は機械の様々な電子管理シ
ステムに提供する識別手段が設けられている。前述の回路構成要素は、加速度、圧力及び
温度センサ2、信号調整及び処理回路3、ワイヤレス通信システム4、電力創出5及び貯
蔵システム7及び管理エレクトロニクス6を含む。  (もっと読む)
(もっと読む)
ばね上速度推定装置
【課題】 簡便な手順を採りながら、ばね上速度の比較的高精度な推定を可能としたばね上速度推定装置を提供する。
【解決手段】 ばね上速度の推定を開始すると、ばね上速度推定部58は、ステップS11で、各上下Gセンサ13fl〜13rrの検出信号に基づき、各車輪3fl〜3frrのばね上速度ベース値VBfl〜VBrrをそれぞれ算出する。ばね上速度ベース値VBfl〜VBrrの算出を終えると、ばね上速度推定部58は、ステップS12〜S15で、各ばね上速度ベース値VBfl〜VBrrを高さとする4点BPfl〜BPrrを車両の周方向に沿って結んで4本の直線L1〜L4を得た後、これら4本の直線L1〜L4の各中点CP1〜CP4を含む平面Sを基準とする相互補間を行うことにより、各車輪3fl〜3frrにおけるばね上速度Vfl〜Vrrを算出する。
(もっと読む)
車両挙動制御装置
【課題】車両のロール振動を精度良く検出しロール振動の発生を抑制できる車両挙動制御装置を提供すること。
【解決手段】車両のロール角、ヨー角、上下変位、横力をパラメータとするロール振動発生判定式を用いて車両におけるロール振動の発生の有無を判断し(S12〜S20)、ロール振動が発生すると判断された場合に車輪のトレッド幅を大きく調整しロール振動を抑制する(S24)。車両のロール方向、ヨー方向、横方向及び上下方向の4自由度運動の連成により生ずる旋回中のロール振動発散現象の発生を精度良く予測することができると共に、車輪のトレッド幅を調整することでロール振動の発生を的確に抑制できる。
(もっと読む)
緩衝器の制御装置
【課題】非線形な減衰特性を持つ緩衝器の制御に最適となる緩衝器の制御装置を提供することである。
【解決手段】車両Aにおけるバネ上部材Bnとバネ下部材Wnとの間に介装される緩衝器Dnが発生可能な最低減衰力に可変減衰力を付加する減衰力可変機構3を制御する緩衝器の制御装置1において、減衰力目標値Fsnと緩衝器Dnが発生している減衰力Fnとの偏差εnを求め、この偏差εnに基づいて可変減衰力を制御することを特徴とする。
(もっと読む)
サスペンション制御装置、同装置を具備する車両、実現方法およびプログラム
本発明は、自動車の車体のサスペンションの制御装置に関する。本発明によれば、この制御装置は、フロントおよび/またはリアの同じ車軸上に位置する右車輪および左車輪の車体に対する変位(DEB(A))および変位速度(VDEB(A))を測定する手段と、変位(DEB(A))および速度がしきい値を超えた場合に、車輪の大振幅運動を検出する手段(61、62)と、車輪の大振幅運動が検出された場合に、ショックアブソーバのアクチュエータの設定量(ERGD)を計算する手段(64)とを備える。  (もっと読む)
(もっと読む)
車高変化を時系列的に把握する車輌
【課題】サスペンションが車高の変更を行う空気ばねを備え、サスペンションの作動に係るパラメータが車高の変化を検出しつつマイクロコンピュータにてばねの弾性係数やショックアブソーバの減衰係数を織り込んだ演算による推定値として求められる場合に、その時々刻々に変化するパラメータの値をより正確に推定するよう改良された車輌を提供する。
【解決手段】空気ばねによる車高変更中には微小時間毎に微小量ずつ車高が時系列的に変化するものとしてエアサスペンションの作動に係るパラメータを把握する。
(もっと読む)
運転支援方法及び運転支援装置
【課題】 予め登録された場所で周辺状況に応じた運転操作の支援を行う運転支援方法及び運転支援装置を提供する。
【解決手段】 ナビゲーション装置1は、車両の位置及び方位を取得する自車位置検出部5と、後方カメラ25から取得した画像データを画像処理して、登録された地点と自車位置との相対距離と相対方位を算出する画像処理部15を備えている。制御部3は、初期位置から目標位置までの車両の運転操作を示す駆動履歴情報18を取得し、走行履歴情報記憶部16に格納する。そして、制御部3は、予め登録された初期位置に車両が接近した際に、登録された前記駆動履歴情報18に基づいて、車両を目標位置まで追従走行させる。
(もっと読む)
シミュレーション装置
【課題】 種々の周波数帯域にわたって、フリクションを有する動的な運動を解析できるシミュレーション装置を提供する。
【解決手段】 フリクションを有する動的な運動を解析するシミュレーション装置は、前記フリクションがスリップ状態を示すフリクションモードと前記フリクションがスティック状態を示すバネモードとを備え、前記フリクションモードと前記バネモードとの切り替えが、直前の時刻における変位、速度、力及びモードと現在の時刻における速度及び変位とに応じて場合分けされたモデルに基づいて行われ、演算される。また、前記シミュレーション装置内部において、速度ゼロにおける許容計算誤差が自動的に補正される。
(もっと読む)
1 - 20 / 25
[ Back to top ]