
Fターム[3D301EA78]の内容
車体懸架装置 (72,824) | 入力信号 (10,935) | 他(サス以外)の機器の状態 (847) | 推進、駆動系(エンジン回転数、トルク、デフ、補機) (173)
Fターム[3D301EA78]に分類される特許
1 - 20 / 173
サスペンション制御装置
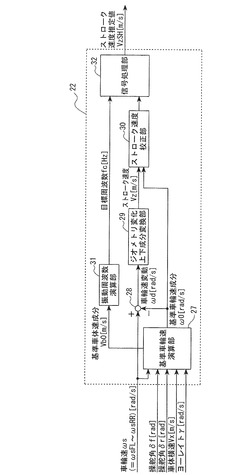
【課題】サスペンションのストローク速度の推定精度を向上可能とする。
【解決手段】制御装置(20)が、車両平面運動成分および路面外乱成分を除去した車体速の成分である基準車体速成分(Vb0)に基づいて目標周波数(fc)を設定する。続いて、制御装置20が、サスペンションのストローク速度(Vz)から目標周波数(fc)を含む周波数帯域の成分を除去する。また、制御装置20が、除去後のストローク速度(Vz)(ストローク速度推定値(VzSH))に基づいて、サスペンションのストローク状態を制御する。
(もっと読む)
サスペンション制御装置

【課題】車両振動の各振動成分の各バネ上挙動を抑制する。
【解決手段】サスペンション制御装置は、減衰させる制御力の出力可能な範囲を算出する制御力可変範囲演算部32と、制御力可変範囲演算部32が算出した出力可能な範囲と車両振動のバウンス振動成分、車両振動のピッチ振動成分、及び車両振動のロール振動成分のうちの少なくとも2つの振動成分から算出された各制御力とをそれぞれ比較し、車両振動のバウンス振動成分、車両振動のピッチ振動成分、及び車両振動のロール振動成分のうちの前記少なくとも2つの振動成分について前記出力可能な範囲内の制御力を抽出する可変範囲比較部33と、可変範囲比較部33が抽出した各制御力に基づいて、各輪の目標制御力を算出する目標制御力演算部34と、目標制御力演算部34が算出した目標制御力に基づいて、ACTR部を制御する制御信号変換部25とを備える。
(もっと読む)
インホイールモータ駆動装置
【課題】より簡易な構成で高度な制御を実現可能なインホイールモータ駆動装置を提供する。
【解決手段】インホイールモータ駆動装置11は、モータ側回転部材を回転駆動するモータ部と、モータ側回転部材の回転を減速して車輪側回転部材に伝達する減速部と、車輪側回転部材に固定連結された車輪ハブ26と、車輪ハブ26を回転可能に支持する車輪ハブ軸受と、モータ部、減速部、または車輪ハブ軸受を覆うケーシング12と、ケーシング12に取り付けられ、当該ケーシング12に生じる歪みを検出可能な複数のセンサ43と、センサ43により出力された歪み信号に基づいて、車輪に負荷される荷重を演算する信号処理装置46とを備える。
(もっと読む)
旋回走行制御装置、旋回走行制御方法
【課題】車高に比べてトレッド幅の狭い車両の旋回性能を改善する。
【解決手段】前後輪のロール剛性に対して制限値Kφminを設定する。そして、電動スタビライザ4F及び4Rを駆動制御し、前後輪のロール剛性を個別に調整することで、前後輪のロール剛性を制限値Kφminよりも大きくする。また、前輪における旋回内輪の輪荷重が0になる前後輪ロール剛性配分Pを上限値Pmax=a1Q+b1で定義し、前輪における旋回内輪の輪荷重が0になる前後輪ロール剛性配分Pを下限値Pmin=a2Q+b2で定義する。そして、前後輪ロール剛性配分Pが上限値Pmaxより小さく、且つ下限値Pminより大きくなるように、電動スタビライザ4F及び4Rを駆動制御して、前後輪のロール剛性を個別に調整する。
(もっと読む)
鞍乗り型の乗り物の制御装置および制御方法
【課題】一例として自動二輪車のような鞍乗り型の乗り物を対象として、その加速時や制動時における車輪のスリップを抑制し、ひいては乗り物の動力性能および制動能力の向上を図る。
【解決手段】乗り物の走行中に例えば前後の車輪の緩衝装置4,18の特性を変更し、乗り物の姿勢を変化させることで、各車輪の路面に対する接地荷重の分布を変更可能な荷重分布変更手段と、乗り物の走行中に、前後の車輪のうちいずれか一方のスリップを抑制するための抑制条件が満たされたことを判定するスリップ抑制条件判定手段91,92と、その条件の満たされたことが判定された場合、条件の満たされていない場合に比べて前記一方の車輪の接地荷重が増大するように、荷重分布変更手段を制御する荷重分布制御手段93と、を備える。
(もっと読む)
サスペンション制御装置及びサスペンション制御方法
【課題】ストローク速度が微低速域であっても車両姿勢をより精度良く制御可能とする。
【解決手段】車両の上屋挙動の検出値に基づき第1目標制御量A1を算出すると共に、車両の制駆動力から推定した上屋挙動に基づき第2目標制御量A2を算出する。その算出した第1目標制御量A1及び第2目標制御量算出手段に基づき最終目標制御量Aを算出する際に、上屋挙動が小さい場合、該上屋挙動が大きい場合に比べて第2目標制御量A2を優先して最終目標制御量Aを算出する。そして、その最終目標制御量Aに基づいて、サスペンションのストロークを制御可能なアクチュエータ15を駆動制御する。
(もっと読む)
サスペンション制御装置
【課題】サスペンションのストロ−ク速度の推定精度を向上可能とする。
【解決手段】制御装置20が、車輪速ωsが含んでいる成分のうち、サスペンションのストロ−クに伴う車輪14の車両前後方向への変位に起因する成分である車輪前後変位成分ωzyに基づいて、サスペンションのストロ−ク速度Vzを推定する。そして、推定したストロ−ク速度Vzに基づいてサスペンションのストロ−ク状態を制御する。この構成によれば、例えば、サスペンションがストロ−クすると、車輪14に車両前後方向への変位が発生するところ、サスペンションのストロ−クに伴う車輪前後変位成分ωzyに基づくことで、サスペンションのストロ−ク速度Vzの推定精度を向上できる。
(もっと読む)
サスペンション制御装置
【課題】サスペンションのストロ−ク速度の推定精度を向上可能とする。
【解決手段】制御装置20が、車輪速ωsに基づいて、車両平面運動成分および路面外乱成分を除去した車体速の成分である基準車体速成分Vb0を算出する。続いて、算出した基準車体速成分Vb0に基づいて、サスペンションのストロ−ク速度Vzを算出する。そして、算出したストロ−ク速度Vzに基づいてサスペンションのストロ−ク状態を制御する。それゆえ、例えば、車両平面運動成分や路面外乱成分が混入し、車輪速ωsの検出精度が低下しても、基準車体速成分Vb0の推定精度の低下を抑制できる。そのため、サスペンションのストロ−ク速度Vzの推定精度を向上できる。
(もっと読む)
制振装置、振動抑制方法及び制振プログラム
【課題】加振源の状態が変化した場合でも発生する振動の状態を変化前と変わらない状態に保つことができる制振装置を提供する。
【解決手段】不要な振動を抑制するとともに、必要に応じて所定の振動を発生させる制振装置であって、リニアアクチュエータに支持された補助質量を振動させることにより制振対象物を加振する加振手段と、制振対象物を振動させる加振源の周波数を検出する周波数検出手段と、測定点における振動を検出する振動検出手段と、加振源の周波数と前記測定点において検出された振動に基づいて、抑制するべき振動と、発生させるべき振動の指令値を求める演算手段と、抑制するべき振動の指令値と、発生させるべき振動の指令値を重畳させた制御信号を加振手段に出力する制御信号出力手段とを備えるように構成した。
(もっと読む)
車両
【課題】前輪と後輪に付与する駆動力を調整することで車高を変更することができるようにした車両を提供する。
【解決手段】車体12と、車体12の進行方向前側に設けられる前輪14と、車体12の進行方向後側に設けられる後輪16と、前輪14に駆動力を付与する前輪電動モータ18と、後輪16に駆動力を付与する後輪電動モータ20と、前輪14と車体12とを接続する前輪サスペンション22と、後輪16と車体12とを接続する後輪サスペンション24と、前輪サスペンション22および後輪サスペンション24を通じて車体12に重力方向における所定の荷重が生じるように、前輪電動モータ18が前輪14に付与する駆動力の大きさおよび後輪電動モータ20が後輪16に付与する駆動力の大きさを調整する調整手段26とを有するように構成する。
(もっと読む)
キャンバ制御装置
【課題】スプリット路上で車両を走行させたり、発進させたりする際に、車輪に付与されたキャンバによって車両の状態が不安定になることがないようにする。
【解決手段】車両のボディと、ボディに対して回転自在に配設された複数の車輪と、該各車輪のうちの所定の車輪に配設され、車輪にキャンバを付与するためのキャンバ可変機構と、車両がスプリット路上にあるかどうかを判断するスプリット路判断処理手段と、スプリット路判断処理手段によって車両がスプリット路上にあると判断された場合に、キャンバ可変動作を変更するキャンバ可変動作変更処理手段とを有する。車両がスプリット路上にあると判断された場合に、車輪がキャンバが付与されている状態に保持されるか、キャンバが付与されていない状態に保持されるか、又はキャンバの付与動作若しくは解除動作が遅延させられるので、車両の状態が不安定になることがない。
(もっと読む)
車両用制御装置
【課題】撮像手段による撮像内容を用いて、自車の走行車線を維持するように車両を制御する車両用制御装置に関し、車輪のキャンバ角を調整することで、走行車線を維持可能な車両用制御装置を提供する。
【解決手段】車両用制御装置100は、フロントカメラ85により前方の走行車線DLを撮像し、画像処理部86により画像解析することにより、走行車線DLにおける左車線境界LL、右車線境界LR、自車位置を特定する。特定結果に基づき、自車が当該走行車線を逸脱しそうであると判断すると、当該車両用制御装置100は、右後輪2RR、左後輪2RLに夫々配設されたキャンバ角調整装置90を制御して、何れか一方の車輪に係るキャンバ角を、他方の車輪と異なるキャンバ角に変更し、キャンバースラストにより走行車線DL中央へと導く。
(もっと読む)
車両制御装置および車両制御方法
【課題】レーン移動動作を行う際に車両の姿勢を安定させることができなかった。
【解決手段】自車両の移動先の目標レーンを示す情報を含む推奨経路情報と、前記自車両が走行している自車走行レーンを示す情報を含む自車位置情報とを取得し、前記自車走行レーンが前記目標レーンと異なる場合に、前記自車両がレーン移動動作を行う予定であることを予測するレーン移動予測手段と、前記自車両がレーン移動動作を行う予定であると予測された場合に、前記自車両の姿勢を安定させるための安定制御を開始させるための開始条件を満たすか否かを判定する開始条件判定手段と、前記開始条件を満たすとき、前記安定制御を開始させる安定制御手段と、を備え、前記開始条件判定手段は、前記自車両がレーン区画線を跨いだ場合に前記開始条件を満たすと判定する。
(もっと読む)
車両用制御装置
【課題】車輪のキャンバ角を調整するキャンバ角調整装置を備えた車両に用いられる車両用制御装置に関し、キャンバ角の調整に伴って生じる車両の挙動特性の変化に基づく違和感を、運転者等に与えることのない車両用制御装置を提供する。
【解決手段】車両用制御装置100は、安定キャンバ付与基準データ72B等に規定された条件を満たす場合、キャンバ角調整装置44を制御し、左後輪2RL及び右後輪2RRのキャンバ角を調整する。又、車両用制御装置100は、旋回判定基準データ72Cの基準値と、加速度センサ装置80等の検出値を比較することで、車両1が旋回中であるか否かを判定する。車両1が旋回中である場合、車両用制御装置100は、安定キャンバ付与基準データ72Bに係る条件を満たしていても、キャンバ角調整装置44によるキャンバ角の調整を禁止する。
(もっと読む)
サスペンション制御装置
【課題】車体姿勢を目標姿勢に追従させる。
【解決手段】車体の目標姿勢と、この目標姿勢を実現するために必要な目標制御量とを設定し(ステップS2、S3)、目標姿勢と実際の車体姿勢との姿勢偏差をフィードバック項として算出し(ステップS4)、この姿勢偏差に基づいて、車体姿勢を目標姿勢に一致させるために必要な補正量を算出する(ステップS5)。そして、補正量に応じて目標制御量を補正し(ステップS6)、補正した目標制御量に応じてアクチュエータを駆動制御することで、サスペンションストロークの制御を行う(ステップS7)。
(もっと読む)
車両
【課題】1つの駆動源を用いて駆動タイヤとサスペンションのそれぞれを作動させることができる車両。
【解決手段】駆動源8と、駆動源8から出力される駆動力によって回転可能な駆動輪3と、駆動源8から出力される駆動力によって作動するサスペンション7と、駆動源8と、駆動輪3またはサスペンション7との接続を切り替える切替え手段23とを有する走行装置4を備える車両を提供する。
(もっと読む)
車両制御装置
【課題】車両の姿勢制御の性能の確保と製造コストの低減とを両立することができる車両制御装置を提供すること。
【解決手段】車両制御装置2に、左右それぞれのスタビライザバー12と一体になって回転可能なスタビライザバーギア24と、双方のスタビライザバーギア24と噛み合うピニオンギア26と、をそれぞれ有する前輪6用及び後輪8用のスタビライザ10と、双方のスタビライザ10を連結する連結シャフト34と、を備え、左右のスタビライザバーギア24の回転トルクが同相の場合には、ピニオンギア26が回転することによりスタビライザバーギア24間で回転を伝達し、回転トルクが逆相の場合には、ピニオンギア26が停止することによりスタビライザバーギア24の回転を停止させ、連結シャフト34は、スタビライザバーギア24の回転軸を中心としてピニオンギア26を回転させることによりスタビライザバーギア24の回転を調節する。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映した走行特性とすることによりドライバビリティを向上させる。
【解決手段】走行している車両の状態に基づいてパラメータ(指標)を求め、前記車両に搭載されているアクチュエータの制御量をそのパラメータに基づいて決定する車両の制御装置において、前記パラメータに対する前記制御量を複数のアクチュエータ毎に予め設定しておき、前記パラメータが求められた場合にその単一のパラメータに基づいて前記複数のアクチュエータ毎の制御量を求める(ステップS31,S32,S33)とともにその制御量に基づいて各アクチュエータを制御するように構成されている。
(もっと読む)
車両用制御装置
【課題】車両の旋回性能を向上させることができる車両用制御装置を提供すること。
【解決手段】旋回度減少期の車速がUS限界値を超え、ステア特性がアンダステアになる恐れがある場合には、左右の後輪2RL,2RRの旋回内輪のキャンバ角を絶対値が大きくなるように調整して旋回外輪のキャンバ角よりも大きくなるようにネガティブキャンバ方向へ調整することで、左右の後輪2RL,2RRの旋回内輪に発生するキャンバスラストを旋回外輪に発生するキャンバスラストよりも大きくして、ステア特性をオーバステア傾向にするためのヨーモーメントを車両1に作用させることができる。よって、アンダステアを抑制することができる。
(もっと読む)
車両用制御装置
【課題】車両の旋回性能を向上させることができる車両用制御装置を提供すること。
【解決手段】旋回度増加期の車速がUS限界値を超え、ステア特性がアンダステアになる恐れがある場合には、左右の後輪の旋回内輪のキャンバ角を旋回外輪のキャンバ角よりも大きくなるようにネガティブキャンバ方向へ調整することで、左右の後輪の旋回内輪に発生するキャンバスラストを旋回外輪に発生するキャンバスラストよりも大きくして、ステア特性をオーバステア傾向にするためのヨーモーメントを車両に作用させることができる。よって、アンダステアを抑制することができる。
(もっと読む)
1 - 20 / 173
[ Back to top ]