
Fターム[3D301EB08]の内容
車体懸架装置 (72,824) | 制御対象 (5,102) | ばね、アクチュエータ(車重を支えるもの) (2,164) | 減衰係数制御 (214)
Fターム[3D301EB08]に分類される特許
1 - 20 / 214
車両のサスペンション装置
【課題】車輪まわりの構造を簡単化でき、且つ、複雑な制御を実施しなくても衝撃減衰を図ることができる車両のサスペンション装置を提供する。
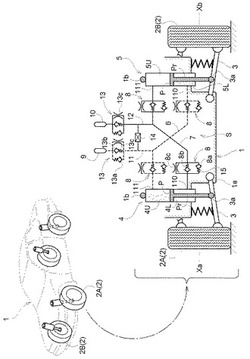
【解決手段】車両のサスペンション装置Sは、前輪及び後輪の少なくとも一方の左右一対の車輪2において、左の車輪2Aと車体1との間に介在された左油圧シリンダ4と、右の車輪2Bと車体1との間に介在された右油圧シリンダ5と、左油圧シリンダ4の上シリンダ室4Uと右油圧シリンダ5の下シリンダ室5Lとを連通接続する第1油路6と、右油圧シリンダ5の上シリンダ室5Uと左油圧シリンダ4の下シリンダ室4Lとを連通接続する第2油路7と、第1油路6と第2油路7とに連通状態に夫々設けられたアキュムレータ9,10と、アキュムレータ用第1バルブ13bと、アキュムレータ用第1バルブ13bの負荷より大きな負荷を与えるアキュムレータ用第2バルブ13aとを備える。
(もっと読む)
サスペンションシステム

【課題】車両の走行状態に拘らず、最適な乗り心地及び走行安定性を実現することが可能なサスペンションシステムを提供する。
【解決手段】サスペンションシステム100は、上側シリンダ室10Uと、下側シリンダ室10Lと、当該下側シリンダ室10Lの開口部の開口面積を調整する可変バルブ11と、を有し、車両1が有する一対の車輪2に組み込まれた一方の減衰力制御シリンダ10Aの上側シリンダ室10Uと他方の減衰力制御シリンダ10Bの下側シリンダ室10Lとを連通する第1連通路21と、一方の減衰力制御シリンダ10Aの下側シリンダ室10Lと他方の減衰力制御シリンダ10Bの上側シリンダ室10Uとを連通する第2連通路22と、第1連通路21と第2連通路22との夫々に設けられ、減衰力制御シリンダ10A、10Bの動作に応じてオイルを貯留及び排出する一対のオイル受部23と、を備える。
(もっと読む)
車両運動制御装置及びサスペンション制御装置
【課題】 制動力制御手段と協働して車両走行時の旋回操作性、操縦安定性、乗り心地を向上することができる車両運動制御装置を提供する。
【解決手段】 GVC制御部41によって車体1側に発生するピッチをピッチレイト推定部48で推定する。このピッチレイト推定値とピッチレイトセンサ11からの実ピッチレイトのうち、値の大きい方を最大値選択部49で選択し、この最大値をピッチ制御部24の差演算部26にピッチレイト信号として出力する。このため、ピッチ制御部24では、前記最大値と目標ピッチレイトとに基づいてロール感を向上するためのピッチ制御による目標減衰力を算出する。GVC制御部41によって発生するピッチレイトが大きい場合には、ピッチを抑えるように制御する。
(もっと読む)
サスペンション制御装置
【課題】サスペンションのストロ−ク速度の推定精度を向上可能とする。
【解決手段】制御装置20が、車輪速ωsに基づいて、車両平面運動成分および路面外乱成分を除去した車体速の成分である基準車体速成分Vb0を算出する。続いて、算出した基準車体速成分Vb0に基づいて、サスペンションのストロ−ク速度Vzを算出する。そして、算出したストロ−ク速度Vzに基づいてサスペンションのストロ−ク状態を制御する。それゆえ、例えば、車両平面運動成分や路面外乱成分が混入し、車輪速ωsの検出精度が低下しても、基準車体速成分Vb0の推定精度の低下を抑制できる。そのため、サスペンションのストロ−ク速度Vzの推定精度を向上できる。
(もっと読む)
サスペンション制御装置
【課題】車体と車輪との間の上,下方向の相対速度が0付近で頻繁に変化する場合でも、車両の振動を緩衝することができ、振動や異音の発生を抑えることができる車両用サスペンション制御装置を提供する。
【解決手段】ばね上加速度センサ8、ばね下加速度センサ9、減算器13および積分器12によって、車体1と車輪2との間の上,下方向の相対速度V2を検出する。そして、検出された相対速度V2を、相対速度補正部15で補正し、補正相対速度V2ofsを出力する。ここで、相対速度補正部15は、相対速度V2が高周波のときには、補正相対速度V2ofsとして所定の値(例えば、直前の制御周期の補正相対速度V2ofs_Z)を出力する。相対速度V2が低周波のときには、補正相対速度V2ofsは、相対速度V2の符号(正負)の切換りに応じてその符号(正負)が切換わるようにする。
(もっと読む)
緩衝器およびサスペンション装置
【課題】 アクティブサスペンションと同等に減衰力の発生範囲を広げることができ、省エネルギで小型化を図ることができるようにする。
【解決手段】 油圧シリンダ1で発生する減衰力を可変に制御する減衰力発生機構11を、油圧シリンダ1のジョイント9とポート10との間を外筒2の外側で連通させる連絡管路12と、連絡管路12の途中に設けられたパイロットオリフィス13およびポンプ14と、パイロットオリフィス13およびポンプ14を迂回して連絡管路12に接続されたバイパス管路15と、バイパス管路15の途中に設けられたリリーフ弁16等とにより構成する。コントローラ22からの制御信号でモータ20を駆動しポンプ14を正,逆方向に回転させる。リリーフ弁16のリリーフ設定圧を可変に制御し、油圧シリンダ1をアクティブサスペンションとして作動させることができる。
(もっと読む)
車両用サスペンション制御装置
【課題】スタビライザの状態を変化させる場合の車両のロール方向のばね力とロール方向の減衰力との比の変動を抑制することができる車両用サスペンション制御装置を提供すること。
【解決手段】左車輪に接続された左スタビライザバー11と右車輪に接続された右スタビライザバー12とを連結した連結状態と、左スタビライザバーと右スタビライザバーとを遮断した遮断状態とに切替え可能なスタビライザ10と、左車輪および右車輪にそれぞれ配置されたエアサスペンションと、左車輪に配置されたエアサスペンション41FLの空気室41dと右車輪に配置されたエアサスペンション41FRの空気室とを連通する通路53Fと、通路の流路断面積を変更する調節機構55と、を備え、スタビライザの連結状態と遮断状態とが切り替わるときの車両のロール方向のばね力とロール方向の減衰力との比の変動を抑制するように調節機構を制御する。
(もっと読む)
サスペンション装置
【課題】 高価なコントローラ、アクチュエータを用いることなく、車両走行時の低周波から高周波にわたる広い周波数域に対応した減衰力の制御を行う。
【解決手段】 左,右の前輪サスペンション4の緩衝器6と左,右の後輪サスペンション7の緩衝器9とを、周波数感応部24が付設された減衰力調整式油圧緩衝器(即ち、減衰力調整+周波数感応緩衝器)により構成する。緩衝器6,9に設ける減衰力可変機構17のアクチュエータ20をコントローラ37により駆動制御する。コントローラ37は、車体1側の上下振動が低周波のときに、その上下振動に応じて減衰力可変機構17(シャッタ18)による減衰力をソフトとハードとの間で可変に調整し、前記振動が前記低周波よりも高周波のときには、前記減衰力の調整制御を行わない構成としている。
(もっと読む)
サスペンション装置
【課題】 高周波振動入力時にダンパ装置が所望の減衰力を発生するように構成されたサスペンション装置を提供すること。
【解決手段】 本発明のサスペンション装置は、モータ31の回転角速度Vmを取得する状態量演算部51と、状態量演算部51により取得された回転角速度Vmに基づいて、回転角速度Vmの高周波成分に対する減衰力(モータ減衰力fmの高周波成分)fm_filtを演算する減衰力演算部(524,525)と、モータ31が減衰力演算部により演算された減衰力を発生するように、モータ31が出力すべき目標制御力fを演算する目標制御力演算部526と、を備える。そして、目標制御力演算部526により演算された目標制御力fに基づいてモータ31を制御する。
(もっと読む)
車両のサスペンション装置
【課題】 電磁アクチュエータの電動モータ31の過熱を防止する。
【解決手段】 モータフリー制御部53は、モータ温度Tmが過熱防止開始温度Tmaを超えていると判断した場合には、相間開放用リレーユニット54の各リレーR1,R2,R3をオフ状態にする。これにより、電動モータ31の過熱が防止される。この場合、エアバネ制御部150は、給排装置80からエアバネ装置20に圧縮空気を供給して、エアチャンバ26の内圧を上昇させて、エアバネ装置20のバネ定数を増加させる。これにより、電動モータ31が減衰力を発生できなくても、ストッパ当たりが低減される。
(もっと読む)
サスペンション装置
【課題】 エアバネ装置のバネ定数の振幅依存性による乗り心地の低下を良好に抑制し、かつ、電磁アクチュエータの振動や作動音の発生を低減する。
【解決手段】 エアバネ装置の小振幅振動時に、バネ上部材が上方向に動作している場合には電磁アクチュエータの制御量を増加補正し、バネ上部材が下方向に動作している場合には電磁アクチュエータの制御量を低減補正する。この場合、バネ上部材が上方向に動作している場合であっても、電磁アクチュエータが推進力を発生している状況であれば、電磁アクチュエータの制御量の増加補正を行わないようにする。また、バネ上部材が下方向に動作している場合であっても、電磁アクチュエータが減衰力を発生している状況であれば、電磁アクチュエータの制御量の低減補正を行わないようにする。
(もっと読む)
サスペンション装置
【課題】 悪路走行時にバネ下関連制御量の位相遅れを低減する。
【解決手段】 周期設定部170は、バネ下加速度センサ62の出力する検出信号G1の変化率の大きさ|G1’|が基準値Th1より大きく、かつ、バネ下上下加速度の大きさ|G1|が基準値Th2よりも大きいときに、悪路走行時であると判定して、バネ上減衰制御力演算部110の演算周期Tbを長くし、バネ下減衰制御力演算部120、慣性力演算部130、制振制御力演算部140、目標モータ力演算部150の演算周期Twを短くする。また、通信部160の通信周期Tsも短くする。これにより、マイクロコンピュータの高スペック化を図らなくても、慣性補償制御を適切に行うことができる。
(もっと読む)
水陸両用車
【課題】 陸上走行に於いては車輪の上下ストロークが大きく、スクリューの格納も出来、水上では車輪を格納して安定した走行が出来、又水平を保ち、水際で岩に当ってもスクリューが破損しない水陸両用車を提供することにある。
【解決手段】 駆動機構を組み込んだトレーリングアーム式懸架装置と、車輪の出し入れや、車両がバウンドしたときに必要なバンプストップに代わる機能が発揮出来る両ロッド式差動シリンダー使用のエアサスペンションシステムとの組み合せ、及び、車体のタイヤハウスを利用した浮力補助システム、更に格納式スクリューにより目的が可能となる。
(もっと読む)
回転動作を直線動作に変換するための機構を含むアクチュエータ
基準フレームに対してボディのポジションを制御するよう構成されたアクティブ振動抑制デバイスが提案される。この抑制デバイスは、少なくとも一つの方向へのボディの移動に対応する入力信号を提供するセンサーと、ボディのポジションを制御するよう構成されたロータリーモーターと、ボディに対してロータリーモーターを連結する4本バーリンケージとを含む。リンケージは、モーターからの回転動作出力をボディの直線動作へと変換する。コントローラは、基準フレームセンサーからの入力信号に基づいて、基準フレームのポジションに対して少なくとも一つの方向においてボディを位置調整するためにリンケージを介して作用するロータリーモーターに制御信号を提供する。 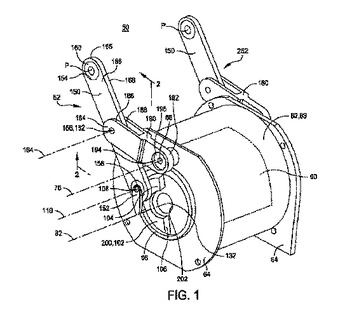 (もっと読む)
(もっと読む)
アクチュエータの作動制御装置
【課題】 プレビュー制御の制御性能の悪化が抑えられるアクチュエータの作動制御装置を提供すること。
【解決手段】 プレビューセンサ63によりセンサ距離z_ssrが検出されたときに検出の対象とされた路面位置を表すプレビュー位置Dpに基づいて、そのプレビュー位置Dpにおける路面変位量x_roadを記憶するためのデータ記憶位置iが演算される。そして、RAM54の記憶領域541のうち演算されたデータ記憶位置iにより表される記憶場所に路面変位量x_roadが記録される。
(もっと読む)
車両用空気ばね装置
【課題】車両の台車と車体との間に二次ばねとして設置される空気ばねの減衰性能が、路線の全区間における区間条件、或いは全速度条件において車両の走行地点や走行速度に応じて的確に調整されるようにして車両の乗り心地を向上させることを課題としている。
【解決手段】台車と車体との間に配置する空気ばね10の内室11と外部の補助空気室12との間の空気通路に駆動源6を含む可変オリフィス4を設け、車両の走行地点又は走行速度に応じて設定した最適なオリフィス径を制御装置8に予め入力し、この制御装置からの指令で設定地点又は設定走行速度のときに設定されたオリフィス径となるように前記可変オリフィスを制御するようにした。
(もっと読む)
鞍乗型車両
【課題】旋回時の安定性を向上できる鞍乗型車両を提供する。
【解決手段】ハンドルが左に切られたとき、調整装置10内の調整ピストン103は調整ガス室104L側に、操舵角に対応した距離だけ移動する。このとき、調整ガス室104Lの容量は収縮する。エアショックアブソーバ8L内のガス室808Lは調整ガス室104Lとつながっているため、ガス室808L内の圧力は上昇する。その結果、エアショックアブソーバ8Lの反力は低下する。一方、調整ガス室104Rの容量は膨張するため、調整ガス室104Rとつながっているエアショックアブソーバ8Rのガス室808Rの圧力は低下する。その結果、エアショックアブソーバ8Rの反力は上昇する。以上の結果、旋回時のロール量が操舵角に応じて低減される。
(もっと読む)
車両運動制御システム
【課題】単一の前輪とその前輪より後方側に配設された左輪および右輪とを有する車両に搭載されて車両の運動を制御するシステムであって、車両の斜め前方への転倒を防止することが可能な車両運動制御システムを提供する。
【解決手段】制動かつ旋回状態にある場合において車両が転倒する可能性が高くなった場合に、車両がさらに旋回内側を向くように車両の運動を制御する。車両を旋回内側に向けることで、制動旋回によって車体に作用する力の向きを、車両が転倒しにくい向き、例えば、車幅方向に平行な向き等に変更することが可能となる。したがって、本車両運動制御システムによれば、車両の転倒を防止することが可能となる。
(もっと読む)
オートバイに対して働く左右方向の力の削減のための方法及び装置
【課題】オートバイのカーブ走行の際に、後輪の横滑り、オートバイは棒立ち(ハイサイダー)を防ぐ制御装置及び方法を提供する。
【解決手段】カーブ走行の間にオートバイの後輪が左右方向にスリップする不安定な状態を後輪のスリップ角、操舵角、車体の傾斜状態、加速度、後輪のホイールスリップ等の変化度により検知して、ハイサイダーの危険が検知されると、ドライバーがその様な状況でエンジントルクを絞っても、エンジントルクの低下が自動的に制限される。
(もっと読む)
ショックアブソーバ装置
【課題】 ブラシ付モータ40の回転が急停止したときにブラシ部に発生する大きな火花によりブラシの寿命が低下しないようにする。
【解決手段】 電磁式ショックアブソーバ30が伸長動作をしており、そのストローク速度Vsが第1基準速度Vs1より大きく、かつ、ばね上部の移動方向が下向きである場合に、ECU50は、電磁式ショックアブソーバ30の伸長動作が急激に停止すると予測して、第2スイッチング素子SW2をオフにする。これにより、電磁式ショックアブソーバ30が急激に停止してもモータ40に電流が流れないため、ブラシ部での火花の発生を防止できる。
(もっと読む)
1 - 20 / 214
[ Back to top ]