
Fターム[3D301EC30]の内容
Fターム[3D301EC30]に分類される特許
1 - 20 / 235
減衰力調整式シリンダ装置
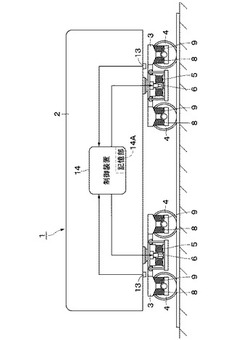
【課題】 異常を検出するときの誤検出を減らすことができる減衰力調整式シリンダ装置を提供する。
【解決手段】 減衰力可変ダンパ6は、台車3と車体2との間に連結される。減衰力可変ダンパ6には、減衰力特性を調整するアクチュエータ7が搭載されると共に、減衰力可変ダンパ6から車体2に作用する力を検出する力センサ12が内蔵されている。加速度センサ13は、車体2に設けられ、上,下方向の車体加速度を検出する。制御装置14は、正常状態と判定したときは、力センサ12と加速度センサ13の検出信号を用いて減衰力可変ダンパ6の減衰力特性を制御する。一方、制御装置14は、センサ故障状態と判定したときは、力センサ12からの検出信号を用いずに、加速度センサ13の検出信号を用いて減衰力可変ダンパ6の減衰力特性を制御する。
(もっと読む)
車体傾動制御装置、車体傾動制御方法

【課題】車体を旋回内側に傾動させるときの旋回性能を改善することである。
【解決手段】旋回走行時に車体をロール方向に沿って旋回内側に傾斜させる目標対地傾斜角φ*を設定し、設定した目標対地傾斜角φ*に応じて、駆動モータ3を駆動制御する。そして、車体の目標ヨーレートγ*を設定し、目標ヨーレートγ*及び車体のロール方向に沿った旋回内側への傾斜角に応じて、車体のヨーレートを制御する。具体的には、操舵角及び車速に応じて、車体の目標ヨーレートγ*を設定し、車体をロール方向に沿って旋回内側に傾斜させるときのキャンバスラストに起因したヨー運動分に相当するキャンバスラスト分補償量δcを算出する。そして、目標ヨーレートγ*及びキャンバスラスト分補償量δcに応じて、車体のヨーレートを制御する。
(もっと読む)
車体傾動制御装置、車体傾動制御方法
【課題】旋回走行時に車体を旋回内側に傾動させる制御の精度を向上させる。
【解決手段】旋回走行時に車体をロール方向に沿って旋回内側に傾斜させる目標対地傾斜角φ*を算出し、旋回走行時における旋回外側へのロール運動分に相当する補償量φrを算出する。そして、目標対地傾斜角φ*及び補償量φrに応じて、駆動モータ3を駆動制御する。また、一次の応答遅れ特性をもつ車両モデル(Gy0(s))に従い、横加速度に応じて補償量φrを算出すると共に、車両モデル(Gy0(s))の時定数を、ロール等価粘性Cφとロール剛性Kφとの比に応じて決定する。また、車両モデル(Gy(s))に従い、運転者のステアリング操作及び車速に応じて、車体の横加速度を推定し、推定した横加速度に応じて補償量φrを算出する。
(もっと読む)
軌道系交通車両及びその車体姿勢制御装置
【課題】軌道系交通車両の加減速時の乗り心地をよくする。
【解決手段】車両Vの前部と後部とに配置され、上下方向に変位して車体1を走行方向で傾ける傾斜アクチュエータ35と、この傾斜アクチュエータ35の駆動量を制御する傾斜アクチュエータコントローラ31とを備えている。傾斜アクチュエータコントローラ31は、車両Vの加減速によって、車体内の乗客Mに作用する車体の床面2に平行な前後方向の加速度αdを、同方向成分の重力加速度gdで打ち消し得る車体1の走行方向の傾斜角度θを求める。そして、傾斜アクチュエータコントローラ31は、この傾斜角度θを実現し得る傾斜アクチュエータ35の駆動量を求めて、この駆動量を目標駆動量とする駆動指令を傾斜アクチュエータ35に出力する。
(もっと読む)
車両制御装置
【課題】車両の走行環境や運転指向をより的確に反映した挙動特性とすることによりドライバビリティを向上させる。
【解決手段】車両の走行状態に基づく指標を求め、前記指標に応じて前記車両の走行特性を変化させる車両制御装置において、前記車両を機敏に走行させる方向への前記指標の前記走行状態の変化に対する変化を、前記車両の走行の機敏さを低下させる方向への前記指標の前記走行状態の変化に対する変化よりも速くする指標設定手段を備える。
(もっと読む)
車両用サスペンション装置
【課題】低温始動時における電磁アクチュエータの摩擦力の影響を低減して乗り心地を向上する。
【解決手段】車両環境温度Txが閾値Trefよりも低い場合には(S12:Yes)、電磁アクチュエータをステップ駆動して(S16)、ステップ駆動する前後のモータ回転角度θm1,θm2から電気モータが回転した角度Δθを求める(S21)。この回転角度Δθから電磁アクチュエータの摩擦力を計算する(S22)。そして、電磁アクチュエータの目標アクチュエータ力fact*を、摩擦力Fに応じた荷重分だけ電磁アクチュエータの作動方向に増加補正する。これにより、目標アクチュエータ力fact*が適正値となる。
(もっと読む)
車両の後輪操舵制御装置
【課題】アクティブサスペンション装置の制御失陥により車両がロール方向に傾いた状態に保持されたときに車両が直進するように後輪を操舵する制御装置を提供する。
【解決手段】車輪を車体に懸架するサスペンション7をアクチュエータで駆動するアクティブサスペンション装置が設けられた車両の左右後輪を操舵制御する後輪操舵制御装置である。この装置は、車両の運動状態量を検出する状態量検出手段17,18,19を備えている。そして、アクティブサスペンション装置の制御失陥により車両がロール方向に傾いた状態に保持されたとき、検出された前記運動状態量に基づいてロール角を算出し、このロール角に応じて車両が直進するように後輪を操舵するように構成する。
(もっと読む)
後輪操舵制御装置
【課題】 悪路走行時の乗り心地を改善することができる車両の後輪操舵制御装置を提供する。
【解決手段】 車体1と後輪3rl,3rrとの間に介装され、伸縮することによって後輪3rl,3rrのトー角を変更する電動アクチュエータ8を備えた車両の操舵制御装置6であって、車両Vが走行している路面の状態を推定する路面状態推定手段(路面状態推定部63)を有し、路面状態推定手段63によって悪路判定がなされた場合、アクチュエータ8を中立状態に維持することを特徴とする。
(もっと読む)
車両挙動制御装置
【課題】走行状態に応じて変動する各輪の状態を考慮してサスダンパによる可変減衰力制御と前後駆動力配分制御との協調を図り、車両の操縦安定性を向上させる。
【解決手段】制御ユニット30は、操舵操作に応じてサスダンパ制御装置24の制御信号Drs_d_sに一次遅れ処理を加えて補正し(Drs_d_mを算出し)、ロール剛性の前後軸配分Drsを演算して、旋回内輪の許容駆動力Fxfi_c、Fxri_cを算出し、旋回内輪の許容駆動力Fxfi_c、Fxri_cにより前後駆動力配分の目標値Dx_tを設定して前後駆動力配分制御装置18に出力する。また、旋回内側後輪の許容駆動力Fxri_cが少なくとも各輪の総駆動力Fxに基づいて設定した閾値より小さい場合は、サスダンパ制御装置24に対してサスダンパ制御補正値Drs_d_mを出力して後軸のロール剛性配分を低下させる。
(もっと読む)
タイヤばね定数推定方法およびタイヤのばね定数を推定可能な車両用サスペンションシステム
【課題】車体の振動と車体と車輪との相対振動との一方である対象振動の強度に基づくタイヤばね定数推定方法およびその方法を実行可能な車両用サスペンションシステム。
【解決手段】車輪と車体との間に配設された装置に特定接近離間力f0を発生させる工程(S12)と、その接近離間力によって生じる対象振動の強度ΔVuを検出する工程(S19)と、その検出された振動の強度に基づいて、接近離間力と対象振動の強度との関係を表す伝達関数を利用して、タイヤのばね定数KTを推定する工程(S20)とを含む推定方法において、伝達関数が、タイヤのばね定数を係数として有しており、その係数の値の変化に伴って接近離間力と対象振動の強度との関係が変化するようにされており、伝達関数での接近離間力が特定接近離間力とされた場合の対象振動の強度が、検出される対象振動の強度となるような上記係数の値をタイヤのばね定数として推定するように構成する。
(もっと読む)
サスペンション制御装置、及びサスペンション制御方法
【課題】乗心地と接地性とのトレードオフの関係を改善する。
【解決手段】第一の算出部41は、検出したストローク速度に基づいて乗心地制御項となる第一の制御量を算出し、周波数特性調整部43は、検出した接地荷重の周波数特性を第一の制御量に基づいて調整し、第二の算出部44は、周波数特性を調整した接地荷重に基づいて接地性制御項となる第二の制御量を算出し、目標制御量演算部45は、第一の制御量及び第二の制御量に基づいて目標制御量を設定する。また、周波数特性調整部43は、先ず第一の制御量に基づいて電磁式ショックアブソーバ10を駆動制御すると仮定して、車輪の接地荷重が変化するときの応答特性L10を推定し、推定した応答特性L10と所定の基準応答特性L20との比較結果に基づいてフィルタ特性L30を決定し、このフィルタ特性L30を介して接地荷重の周波数特性を調整する。
(もっと読む)
車両用サスペンション装置、電動モータの制御方法、及びアクチュエータ制御装置
【課題】電動モータによる発生推力をより推力指令値に近い状態に制御可能とする。
【解決手段】電動モータが発生する推力で車輪2の上下位置を規制する。その際に、推力指令値T1と実推力T0との偏差に応じたフィードバック補償量HF1とフリクション補償量HF2との2つの補償量で、上記電動モータへの推力指令値T1を補償する。このとき、上記推力指令値T1に対する上記2つの補償量を、サスペンションの上下ストローク速度VSに応じて変更する。
(もっと読む)
サスペンション装置
【課題】経済性を損なわず緩衝器が発生している減衰力をモニタすることができるサスペンション装置を提供する。
【解決手段】サスペンション装置1は、シリンダ6内に摺動自在に挿入されるピストン7と、シリンダ6内に移動自在に挿入されてピストン7に連結されるロッド8と、シリンダ6内にピストン7で区画した流体が充填される二つの作動室R1,R2と、シリンダ6とロッド8の相対移動によって生じる流体の流れに抵抗を与える可変減衰弁3とを有し車両のバネ上部材Bとバネ下部材Wとの間に介装される緩衝器2と、可変減衰弁3を制御する制御装置4とを備え、減衰弁3が、流体が通過する流路の途中に設けた弁座15と、弁座15に遠近して流路抵抗を可変にする弁体16と、弁体16を弁座15に対して遠近させる磁歪素子18を有するアクチュエータ17とを備え、磁歪素子18を用いて検出する作動室R1内の圧力に基づいて可変減衰弁3を制御する。
(もっと読む)
タイヤの姿勢制御装置および方法
【課題】車両に装着された転動中のタイヤの姿勢を制御するタイヤの姿勢制御装置及び方法であって、タイヤの偏摩耗を抑制するように制御する。
【解決手段】タイヤセンタ位置から同じ距離はなれたタイヤショルダー側の2つのタイヤ測定位置における接地状態を検出し、検出した接地状態に基づいて、タイヤ1回転に少なくとも1回以上、前記2つのタイヤ測定位置における接地長を求める。この後、1より大きい第1の閾値と、1より小さい第2の閾値を定めたとき、算出した2つの接地長の比率が、第1の閾値より大きい場合、あるいは、第2の閾値より小さい場合、タイヤのキャンバ角を前記比率が1になるように制御する制御信号を生成する。
(もっと読む)
サスペンション装置
【課題】温度補償性能とロール抑制性能の両立が可能なサスペンション装置を提供する。
【解決手段】四輪に介装されたロール抑制アクチュエータ1FL〜1RRの第1室3FL〜3RR及び第2室4FL〜4RRを第1連通路7及び第2連通路8によりクロス配管で連結し、第1連通路7及び第2連通路8の夫々に車体挙動制御用の第1アキュームレータ9及び第2アキュームレータ10を連結と共に、第1連通路7及び第2連通路8を連通して圧力を補償する圧力補償用連通路11に圧力補償用アキュームレータ12を連結し、第1連通路7と圧力補償用アキュームレータ12の間に第1開閉制御弁13を、第2連通路8と圧力補償用アキュームレータ12の間に第2開閉制御弁14を介装し、車両走行中は第1開閉制御弁13及び第2回閉制御弁14を閉弁するといった開閉制御を行うことにより、温度補償性能とロール抑制性能の両立が可能となる。
(もっと読む)
車両用サスペンションシステム
【課題】電磁モータの力に依拠してばね上部とばね下部とを接近離間させる方向の力を発生させる装置を各車輪に対応して設けたサスペンションシステムの実用性を向上させる。
【解決手段】車体に生じている振動を種類が異なる複数の車体振動が合成されたものと捉えてそれら複数の車体振動の各々を減衰の対象とする複数の振動減衰制御を同時に実行可能に構成され、4つの車輪の各々に対応するばね上部の振動におけるばね上共振周波数の振動成分の強度が設定された程度より低い状況下(S11,12)においては、複数の振動減衰制御のうち減衰させる必要のない車体振動に対応する振動減衰制御を実行しないように構成する(S16〜28)。比較的高い周波数の振動が主体となっている場合に、そのような振動に対する減衰性能に影響を与えることがある接近離間力を制限して、乗り心地の悪化を抑制することが可能となる。
(もっと読む)
車両用サスペンションシステム
【課題】 ショックアブソーバとして機能する電磁式アクチュエータAを備え、そのアクチュエータのばね下部側ユニットMIをスプリングK2によってばね下部MLに浮動支持させた構造の車両用サスペンションシステムの実用性を向上させる。
【解決手段】 ばね上部MUの動作速度に基づく減衰力(CS)をアクチュエータ力として発生させるスカイフック制御に加え、上記スプリングに起因するばね下部側ユニットとばね下部との相対振動を抑制する制御を実行する。具体的には、ばね上部とばね下部との一方とばね下部側ユニットとの相対動作速度に基づいて、その相対振動に対する減衰力(CR1若しくはCR2)をアクチュエータ力として発生させる。上記スプリングに起因するばね下部側ユニットの相対振動、特に、共振周波数域の振動を効果的に抑制することで、車両の乗り心地,車両の操縦安定性等が改善される。
(もっと読む)
車両用サスペンションシステム
【課題】自身の減衰係数を変更可能とされた液圧式のショックアブソーバを各車輪に対応して設けた車両用サスペンションシステムの実用性を向上させる。
【解決手段】4つの液圧式のショックアブソーバの各々の減衰係数を制御して、それら4つのショックアブソーバのうちの前輪に対応する2つのものの減衰係数である前輪側減衰係数CFrが後輪に対応する2つのものの減衰係数である後輪側減衰係数CRrより大きい第1の特定状態と、後輪側減衰係数CRrに対して前輪側減衰係数CFrが大きい第2の特定状態とを選択的に実現することで、ピッチ振動の抑制に好適なピッチ抑制状態と、ロール振動の抑制に好適なロール抑制状態とを選択的に実現可能に構成する。そのことにより、高周波振動を減衰して乗り心地の悪化を抑制しつつ、ピッチ振動あるいはロール振動の抑制を図ることが可能である。
(もっと読む)
車両用サスペンションシステム
【課題】実用性の高い車両用サスペンションシステムを提供する。
【解決手段】(a)車体の姿勢変動に伴って動作する電磁モータ60を有し、その電磁モータが発生させる力によって車体の姿勢変動を抑制可能な電磁式の車体変動抑制装置と、(b)その電磁モータへの電力供給および電磁モータからの発電電力の回収可能なバッテリ100と、(c)電磁モータの内部を流れる電流を検出する検出器106とを備えたシステムにおいて、検出電流の変動に基づいて、車両の走行路面のそれの荒さに関する状態を判定するように構成する。走行路面が荒れている場合には、車輪から入力される比較的高周波域の振動によって、電磁モータが反転させられて、起電力に依拠した発電電流は比較的高周波的に変動する。したがって、このような構成によれば、ストロークセンサ等を用いることなく、走行路面が荒れているか否かを判定することが可能となる。
(もっと読む)
車高調整システム
【課題】従来の車高調整システムとは異なる手段により、左右の車高調整アクチュエータの内部の圧力の不均等を軽減し得る車高調整システムを提供する。
【解決手段】車高調整を、左右前輪に対応する車高、左後輪に対応する車高、右後輪に対応する車高の順で行い、各車輪に対応するエアばねについて、この順序でエアの供給、エアの排出許容を行うとともに、複数回繰り返して車高を目標車高に調整する(S7〜S11、S16〜S20)。エアの供給、エアの排出許容が最後に行われる右後エアばねについて予め定められた量の追加のエア供給、排出許容を行い、左右後のエアばねの内部圧力の不均等を軽減させる(S13,S22)。最後から2番目にエアの供給、排出許容を行う左後エアばねに対応する車高を目標車高とは意図的に異ならせた設定車高に制御し、右後エアばねに対応する車高を目標車高に制御して、左右の内部圧力の不均等を軽減するようにしてもよい。
(もっと読む)
1 - 20 / 235
[ Back to top ]