
Fターム[3D301EC42]の内容
Fターム[3D301EC42]の下位に属するFターム
左右で異なる制御の設定/タイミング (224)
前後で異なる制御の設定/タイミング (287)
Fターム[3D301EC42]に分類される特許
1 - 20 / 53
車輪位置可変車両
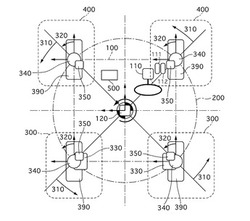
【課題】 簡単な構成で、車両の利便性と車両の挙動安定性の向上を図るとともに、より自由な車両挙動を実現できる車輪位置可変車両を提供する。
【解決手段】 各車輪390に設けられ、車体100に対する車輪の向きを変更する転舵アクチュエータ340と、各車輪390と車体100との間にそれぞれ設けられ、各車輪390を所定の軌道(車輪ユニット移動軌道200)上の任意の位置に移動させるトレッド&ホイールベース変更アクチュエータ350と、走行状態に応じた目標ジオメトリに基づいて、トレッド&ホイールベース変更アクチュエータ350に対し車輪位置変更指令を出力するコントローラ500と、を備え、コントローラ500は、加速度方向側の車輪から重心位置までの距離を、加速度方向と反対側の車輪から重心位置までの距離に対して長くなるように設定する。
(もっと読む)
軌道系交通車両及びその車体姿勢制御装置

【課題】軌道系交通車両の加減速時の乗り心地をよくする。
【解決手段】車両Vの前部と後部とに配置され、上下方向に変位して車体1を走行方向で傾ける傾斜アクチュエータ35と、この傾斜アクチュエータ35の駆動量を制御する傾斜アクチュエータコントローラ31とを備えている。傾斜アクチュエータコントローラ31は、車両Vの加減速によって、車体内の乗客Mに作用する車体の床面2に平行な前後方向の加速度αdを、同方向成分の重力加速度gdで打ち消し得る車体1の走行方向の傾斜角度θを求める。そして、傾斜アクチュエータコントローラ31は、この傾斜角度θを実現し得る傾斜アクチュエータ35の駆動量を求めて、この駆動量を目標駆動量とする駆動指令を傾斜アクチュエータ35に出力する。
(もっと読む)
サスペンション制御装置
【課題】片輪だけの段差乗り越え時にも減衰力特性を適正に制御し、車両の乗り心地を向上することができるようにする。
【解決手段】左ばね上速度と右ばね上速度とが同相と判定したときに、ばね上速度が速い方の車輪側では、片輪のみの段差乗り越えを行っていると判断し、ロール速度に予め決められたゲインを乗算してロールFB制御量をセットすることにより、減衰力特性をハード側に切換える。一方、ばね上速度が遅い方の車輪では、段差乗り越えを行っていないと判断してロールFB制御量をセットせず、減衰力特性をハード側に変更することなく、ソフトな特性に保持する。即ち、段差乗り越えを行っていない車輪側では、減衰力可変ダンパの減衰力特性を前回の減衰力指令信号に維持するように制御する。
(もっと読む)
車両制御装置および方法
【課題】車両の左右非対称性に起因する直進制動時の偏向を抑制する。
【解決手段】車両には、ストローク量を調整可能に構成されたサスペンションが車輪毎に設置されている。直進制動判定部121は、操舵角センサの検出値に基づき車両が直進中か否かを判定し、さらにブレーキトルクセンサの検出値に基づき車両が制動されたか否かを判定する。偏向予測部122は、直進制動判定部121により直進時に車両が制動されたと判定されたとき、車両の左右非対称性に起因して車体に発生する偏向量を予測する。ストローク調整部126は、予測された偏向を減少させるようにサスペンションのストローク量を変更する。
(もっと読む)
キャンバ制御装置
【課題】車輪にキャンバを付与する際に運転者に違和感を与えることがないようにする。
【解決手段】車両のボディと、複数の車輪と、所定の左側及び右側の各車輪に配設された第1、第2のキャンバ可変機構と、キャンバ付与条件が成立したかどうかを判断するキャンバ付与条件成立判断処理手段と、キャンバ付与条件が成立したと判断された場合に、所定の左側及び右側の各車輪のキャンバ角を変更することによって前記各車輪にキャンバを付与するキャンバ付与処理手段とを有する。キャンバ付与処理手段は、第1、第2のキャンバ可変機構の作動中に、第1、第2のキャンバ可変機構による各車輪へのキャンバの付与状態を等しくするキャンバ付与状態調整処理手段を備える。キャンバの付与状態が左側の車輪と右側の車輪とで異なるのを抑制することができる。
(もっと読む)
キャンバ制御装置
【課題】タイヤの偏摩耗が進むのを抑制することができ、タイヤの寿命を長くすることができるようにする。
【解決手段】車両のボディと、複数の車輪と、各車輪のうちの所定の車輪に配設され、車輪にキャンバを付与するためのキャンバ可変機構と、タイヤが使用された区間におけるキャンバの累積変量を記録するための累積変量記録部と、累積変量記録部に記録されたキャンバの累積変量に対応させて、キャンバ可変機構によって前記所定の車輪に負のキャンバを付与するキャンバ付与処理手段とを有する。キャンバの累積変量に対応させてキャンバが付与されるので、タイヤの寿命を長くすることができる。
(もっと読む)
減衰力可変ダンパの制御装置および制御方法
【課題】様々な入力に対応することができ、且つ、車体の姿勢変化を効果的に抑制できる可変減衰力ダンパの制御装置および制御方法を提供する。
【解決手段】減衰力制御装置は、目標減衰力設定部61と、減衰力補正値設定部62と、目標減衰力補正部63とを備える。目標減衰力設定部61は、各車輪に近接する上下Gセンサの検出値である上下加速度Gzfl〜Gzrrに基づき、各ダンパの目標減衰力Dtfl〜Dtrrをそれぞれ設定する。また、減衰力補正値設定部62は、各目標減衰力Dtfl〜Dtrrを相互補間するために、他のダンパに対応する上下加速度Gzfl〜Gzrrに基づき、減衰力補正値Dcfl〜Dcrrをそれぞれ設定する。目標減衰力補正部63は、減衰力補正値Dcfl〜Dcrrに基づき、目標減衰力Dtfl〜Dtrrをそれぞれ補正する。
(もっと読む)
搬送台車および編成搬送用台車設備ならびに編成搬送方法
【課題】搬送台車における支持モードの選択の自由度が高く、編成搬送にも適した搬送台車を提供する。
【解決手段】左右前の支持ブロックFL,FRのサスペンションシリンダ24FL,24FRを接続する前部バイパス管41と、左右後の支持ブロックRL,RRのサスペンションシリンダ24RL,24RRを接続する後部バイパス管43と、前後左の支持ブロックFL,RLのサスペンションシリンダ24FL,24RLを接続する左部バイパス管45と、前後右の支持ブロックFR,RRのサスペンションシリンダ24FR,24RRを接続する右部バイパス管47と、これらすべてのバイパス管をそれぞれ連通、遮断可能な2方向制御弁42,44,46,48とを設け、2方向制御弁42,44,46,48を操作することにより、4点支持、前左右分割の3点支持、後左右分割の3点支持、前後の2点支持、左右の2点支持、1点支持の各モードで荷を支持可能に構成した。
(もっと読む)
キャンバ制御装置
【課題】駆動部を小型化することができ、車両を小型化し、車両のコストを低くすることができるようにする。
【解決手段】車両のボディと、複数の車輪と、車輪に対してキャンバ角の付与及び付与の解除を行うためのアクチュエータと、所定の車輪に対してキャンバ角を付与する第1のアクチュエータ駆動処理手段と、所定の車輪に付与されたキャンバ角を解除する第2のアクチュエータ駆動処理手段とを有する。第1のアクチュエータ駆動処理手段によるアクチュエータの動作速度が、第2のアクチュエータ駆動処理手段によるアクチュエータの動作速度より高くされる。キャンバ角付与条件が成立した場合に、アクチュエータの動作速度が高くされるので、前記所定の車輪に急速にキャンバ角を付与することができ、車両の安定性を高くすることができる。
(もっと読む)
車両統合制御装置
【課題】車両安定性制御装置とサスペンション制御装置とを統合して、車両の走行安定性を高める。
【解決手段】オーバーステア時には、旋回外側の前輪3に制動力F1を加えて、車両1に旋回内向きのモーメントを発生させ、また、アンダーステア時には、車両1の旋回内側の後輪4に制動力F2を加えて、車両1に旋回外向きのモーメントを発生させると共に、旋回外側の前後輪3,5に適度な制動力F3,F4を加えて、車両1を減速させることによって車両1の安定性を確保する。このとき、制動力が加えられた車輪に対して、縮み側減衰力を大きくし、伸び側減衰力を小さくし、かつ、懸架ばねのばね力を小さくする。同時に、その他の車輪に対応する縮み側減衰力を小さく、伸び側減衰力を大きくする。これにより、制動力が加えられた車輪の接地荷重を大きくすることができ、車両安定性を向上させる。
(もっと読む)
キャンバ制御装置
【課題】各車輪に必要なキャンバ角を付与することができ、車両の安定性を十分に高くすることができるようにする。
【解決手段】車両の車体と、複数の車輪と、所定の車輪と車体との間に配設され、駆動部を備えたアクチュエータと、所定の車輪にキャンバ角を付与したり、所定の車輪へのキャンバ角の付与を解除したりする駆動部駆動処理手段と、いずれかの車輪に異常が発生したときに、車体の挙動を表す変量に基づいて異常が発生した車輪を特定する異常車輪特定処理手段と、特定された車輪についてアクチュエータを駆動するキャンバ補正処理手段とを有する。異常が発生した車輪が特定され、アクチュエータが駆動されるので、各車輪に必要なキャンバ角を付与することができる。
(もっと読む)
車両の車輪位置変更装置
【課題】 段差乗り越え時の車両の前後方向振動を抑制できる車両の車輪位置変更装置を提供する。
【解決手段】 車輪390を車体に懸架する車輪ユニット300と、車輪ユニット300を車体100に対して水平方向へ移動させる車輪ユニット移動アクチュエータ350と、走行中に車輪390が通過する路面の段差を検出する路面段差検出手段(振動検出センサ320,段差検出センサ400)と、を備え、車輪ユニット移動アクチュエータ350は、路面段差検出手段により段差が検出された場合、当該段差に乗り上げる車輪390の輪荷重が低下する方向へ車輪ユニット300を移動させる。
(もっと読む)
車両用サスペンションシステム
【課題】車両の諸特性を低下させることなく、車体と車輪との間に配設されたアクチュエータによって、ストローク動作のストッパ当たりによる衝撃を緩和する。
【解決手段】各車輪に設けられた電磁式のアクチュエータと、各車輪と車体とのストローク動作を規制するストッパとを備えた車両用サスペンションシステムにおいて、車輪と車体とのストローク動作がストッパによって規制されると想定される場合に、その車輪に設けられた対象アクチュエータがストロークエンドから離れる方向の力である離間方向力を発生させるとともに(S25)、対象アクチュエータ以外の3つのアクチュエータの各々が、上記離間方向力の車体の姿勢に対する影響を打ち消す力を発生させるように構成する(S26)。このように構成すれば、車両の諸特性を低下させることなく、アクチュエータによってストッパ当たりによる衝撃を緩和することが可能となる。
(もっと読む)
制御装置
【課題】車両が盗難にあったとしてもその回収を容易化し得る制御装置を提供すること。
【解決手段】本発明の制御装置によれば、車両が盗難された又は盗難された疑いがあると盗難判定手段によって判定された場合には、盗難対策手段によりキャンバ角調整装置が作動され、通常走行時に比べて走行を阻害するキャンバ角(例えば、ポジティブ側又はネガティブ側に最大のキャンバ角)が車輪に付与される。よって、少なくとも盗難の危険がある状態において、通常走行時に比べて走行を阻害するキャンバ角が車輪に付与されるので、盗難車両の自走を通常状態より困難にすることができ、その結果として、盗難場所からの移動距離を制限できる。従って、盗難車両の回収を容易化できると共に、回収コストを抑制することができるという効果がある。
(もっと読む)
車輪位置可変車両および車輪位置制御方法
【課題】 操縦安定性の向上と利便性の向上とを共に実現することができる車輪位置可変車両および車輪位置制御方法を提供する。
【解決手段】 各車輪ユニット300を車体100に対して車幅方向の任意の位置に移動させるトレッド&ホイールベース変更アクチュエータ350と、各車輪390の輪荷重が目標輪荷重となるようにトレッド&ホイールベース変更アクチュエータ350に対し車輪位置の変更を指令する輪荷重制御装置510と、左右輪の一方と車体の車幅方向中心位置との距離と、左右輪の他方と車幅方向中心位置との距離とを異ならせることにより、車体の車幅方向位置が目標車体位置となるようにトレッド&ホイールベース変更アクチュエータ350に対し車輪位置の変更を指令するキャビン位置制御装置520と、を備える。
(もっと読む)
車両のセミアクティブサスペンション、および車両の挙動抑制制御方法
【課題】車体の振動状態における振動モードも考慮することで、より目標とした車体の振動状態に近づくように車体振動を抑制制御可能にする。
【解決手段】各車輪と車体との間に介装された各輪のダンパの減衰力を、車体の振動状態を目標の振動状態とするために必要な目標減衰力に制御することで車両の挙動を抑制する。上記ダンパで発生可能な減衰力の向きと、対応する上記目標減衰力の向きとが反対方向の輪があると、上記車体の振動状態を構成する複数の振動モードの優先順位と、各輪のダンパで発生可能な減衰力の向きとに基づいて、各輪のダンパの目標減衰力を補正する。
(もっと読む)
能動型サスペンション、及び車両の姿勢変化抑制方法
【課題】車両の姿勢変化を抑制するための制御をより簡便なモデルで実施する。
【解決手段】独立した2つの2輪モデルを想定して、前輪2輪のうちの一方の前輪に対応するアクチュエータの制御力と後輪2輪のうちの一方の後輪に対応するアクチュエータの制御力とで第1の仮想制御点Zaの上下振動を抑制すると共に、前輪2輪のうちの他方の前輪に対応するアクチュエータの制御力と後輪2輪のうちの他方の後輪に対応するアクチュエータの制御力とで第1の仮想制御点とは異なる第2の仮想制御点Zbの上下振動を抑制することで、車両の姿勢変化を抑制する。
(もっと読む)
車両用サスペンションシステム
【課題】前後左右の4つの車輪に対応して設けられ、ばね上部とばね下部との相対動作に対する力を発生させる4つの電磁式ショックアブソーバを含んで構成されるサスペンションシステムの自己診断機能を実用的なものとする。
【解決手段】4つのショックアブソーバが有する電磁式モータの各々を車体にワープ力が作用するようなアブソーバ力を発生させるように作動させる制御(S10)を実行し、その制御の実行中における車体の挙動に基づいて、システムの失陥の有無を判定する(S11)ように構成する。4つのショックアブソーバによって車体にワープ力を作用させても、車体の剛性が高く、車体が動作することはないため、本サスペンションシステムによれば、自己診断のために4つのショックアブソーバの電磁式モータを作動させても、正常であれば車体を動作させないようにすることが可能である。
(もっと読む)
車両駆動輪荷重制御装置
【課題】車輪の駆動輪にかかる荷重を制御することで、車両の発進時の駆動力を向上させるための新規な技術を提供する。
【解決手段】2つの駆動輪のうち一方の駆動輪の直下の路面の路面摩擦係数、および、他方の駆動輪の直下の路面の路面摩擦係数のうち、路面摩擦係数がより高い方を検出し、さらに、路面摩擦係数の低い方の路面の駆動輪1RRに制動トルクを付与するトラクション制御が作動していることを検出したとき、路面摩擦係数の高い方の路面上の駆動輪1RLの接地荷重を増加させる。
(もっと読む)
車両用制御装置及び車両
【課題】その場旋回時における車輪の磨耗やエネルギーロスを低減させ得る車両用制御装置、及びその車両用制御装置により制御される車両を提供すること。
【解決手段】本発明の車両用制御装置及び車両によれば、その場旋回を実行する際に、各車輪に対し、トウ角が付与されると共に、キャンバ角が付与されるので、その場旋回時における各車輪の接地幅を付与前にくらべて狭くすることができるので、その場旋回時における車輪のすべりを抑制することができ、エネルギーロスの発生を低減させることができる。また、各車輪の接地幅が狭くなることにより、車輪の磨耗を低減させることができる。
(もっと読む)
1 - 20 / 53
[ Back to top ]