
Fターム[3F022LL05]の内容
Fターム[3F022LL05]の下位に属するFターム
フォークリフトトラック (86)
無人運搬車 (125)
Fターム[3F022LL05]に分類される特許
61 - 72 / 72
所定領域内における車両位置の検出方法及び装置

【課題】格納施設内における車両位置の低コストで信頼性のある検出方法を提供する。
【解決手段】車両の動きのベクトルを検出し、車両が測定片の設置されたポイントを通過するときに絶対位置を検出して車両の参照位置を決定し、参照位置を基準にして動きベクトルのベクトル和を求めて、車両の現在位置を検出する。絶対位置の検出は車両に設けられた測定片のそれぞれの参照マーク(MS)と非接触な方法で相互に作用するところの、センサ装置によって実行され、個々の参照マーク(MS)は、車両が少なくとも2つの信号(ST1,ST2)によって同時にスキャンする反射及び非反射領域(R1, R2; D)を有する。参照位置の座標(x,y)と、測定片に対する車両の進行角度(α)は、これらの信号(ST1,ST2)の反射強度の時間プロファイルを評価することによって測定される。
(もっと読む)
かご台車監視システム及びその監視方法

【課題】かご台車監視システムにおいて、かご台車の巡回率を向上してかご台車の不足をなくすこと。
【解決手段】かご台車監視システム10は、かご台車1と、かご台車1に取り付けられ且つ無線で送受信する無線ICタグ3と、巡回する配送車両5と共に移動され且つ無線で送受信する配送者端末6とを備える。かご台車1は、配送元7から配送先8に輸送され、配送品2が取り出されて空になった状態で配送先8から配送元7に戻されるものである。無線ICタグ3は、配送者端末6からの確認情報を受信した場合に、受信状況を記憶すると共に、受信状況を配送者端末6へ送信する機能を備える。配送者端末6は、かご台車1の無線ICタグ3に確認情報を発信する機能と、当該無線ICタグ3から送信された受信状況に基づいて、当該かご台車1の使用状況を判定し、その判定結果を表示画面に表示する機能とを備えている。
(もっと読む)
ロール搬送装置、及び荷役車両
【課題】 パレットに複数の円筒体を隙間なく積載できるロール搬送装置、及び荷役車
両を低コストにて提供する。
【解決手段】 ロール搬送装置4は、荷役車両と、円筒体の直径が入力される寸法入力
手段5と、パレットをその上面の中心に一致する鉛直軸周りに回転させるターンテーブル
6と、荷役車両の車台の上面に取付けられる押込装置7と、荷役車両、ターンテーブル6
、及び押込装置7のそれぞれの動作を制御する制御手段8とから構成される。ロール搬送
装置4によれば、手作業で複数の円筒体をパレットに積載し、或いは大掛かりな荷役装置
を設置する必要がない。
(もっと読む)
稼動状況表示システム
【課題】作業区域内を自由に走行して運搬作業を行う運搬車の稼動状況を表示することができる稼動状況表示システムを提供することを課題とする。
【解決手段】作業区域内を自由に走行して運搬作業を行う各運搬車の位置が位置センサで検出され、運搬車の位置データ、この位置データの検出日時を示す時刻データ及び運搬車IDデータが運搬車情報として管理コンピュータへ送信されると、この運搬車情報は管理コンピュータの蓄積部に蓄積される。ユーザーが指定部により分析したい作業区域内の分析場所及び時間帯と表示したい稼動状況の項目とを指定すると、演算部は、指定部により指定された分析場所及び時間帯における指定された項目の稼動状況を蓄積部に蓄積された運搬車情報に基づいて演算し、その演算結果をモニタに表示されたマップ13上の対応する分析場所A〜Iに重ねて表示する。
(もっと読む)
可動式駆動装置及び在庫ホルダを備えた在庫システム
在庫を搬送するシステムは、在庫ホルダ及び可動式駆動装置を含む。在庫ホルダは、在庫アイテムを格納することができるフレームと、下からドッキング・ヘッドを受けることができるドッキング・プレートとを含む。可動式駆動装置は、ドッキング・プレートに結合することができるドッキング・ヘッドと、可動式駆動装置を推進することができる駆動モジュールとを含む。可動式駆動装置は更に、ドッキング・ヘッドが在庫ホルダに結合されると在庫ホルダを移動させることができる。 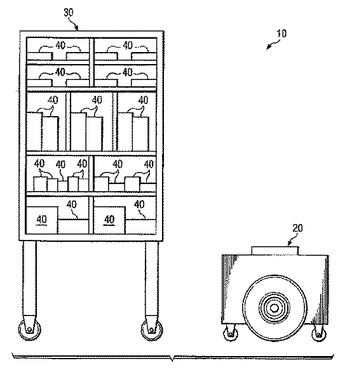 (もっと読む)
(もっと読む)
検知ユニット
【課題】 船舶等の貨物ゲートでにおける貨物の通過を検知することにより、コンテナを含んだ貨物の搬入/搬出状況を正確に把握することが可能な検知ユニットを得ることを目的とする。
【解決手段】 検知ユニット2は、貨物1の搬入/搬出区分や搬入/搬出場所等を入力設定するための入力手段25と、船舶等の輸送手段の貨物ゲートを貨物1が通過する際に、貨物に取付けられた無線タグ11と通信するための無線タグ通信手段21を備える。更に、無線タグ通信手段21が通信した場合に、貨物1の貨物ゲートの通過を判定する制御手段22と、貨物の搬入/搬出区分、搬入/搬出場所等を含む搬入/搬出情報をセンタ装置3へ送信するための無線通信手段23を備えている。センタ装置3では、記憶手段32から該当する貨物情報を抽出し、送信されてきた搬入/搬出情報と照合する。
(もっと読む)
物品搬送車
【課題】 走行輪体のスリップを抑えることができる物品搬送車を提供する。
【解決手段】 駆動手段にて回転駆動されて走行レール2に沿って走行する走行輪体9と、走行レール2に対して上方への移動が規制されるように接触して走行輪体9の走行レール2からの浮上を規制する規制輪体21とを設け、その規制輪体21を、走行レール2に対して弾性体21aの弾性力にて接触圧力をもって接する状態で設ける。
(もっと読む)
情報読取システムおよび情報読取装置
【課題】無線タグが取り付けられている物品の移動速度が速くなると、無線タグの読み取りが困難になるという問題があった。
【解決手段】物品と情報読取装置とからなる情報読取システムであって、前記物品はその物品の識別情報を分割して記憶させた複数の無線式情報記録担体を備え、前記情報読取装置は、前記無線式情報記録担体の情報の読み取りを行う通信部と、前記通信部で読み取った複数の前記無線式情報記録担体の各々の情報を記憶する記憶部と、前記記憶部に記憶された情報を結合して1つの識別情報とする結合部とを備え、前記物品に設けられた複数の前記無線式情報記録担体の情報を前記情報読取装置で読み取って結合することで前記物品の識別を行う。
(もっと読む)
車両へのコンテナの自動積み降ろし用光学装置
本発明は、コンテナ収容区域におけるコンテナの処理能力を高め、コンテナ輸送車両に対する積み降ろし時間を短縮する自動処理方法に関する。当該方法によれば、コンテナ輸送車を識別した後に、コンテナ収容区域の駐車区域に駐車されたコンテナ輸送車両の荷台が測定される。荷台の位置座標は、データ処理システムによって決定される。この荷台の位置座標を利用して、荷積みされるコンテナがクレーンによって自動的に位置決めされる。コンテナを荷台に対して正確に位置決めするために、荷台が再度測定され、その結果、コンテナの位置に対してずれがあれば、そのずれを用いて正確な位置決めがなされる。コンテナは、荷台に対して自動的に載置される。コンテナ輸送車両からの荷降ろしも実質的に同じステップにて行われる。 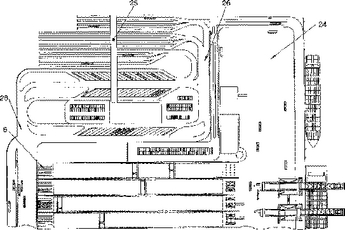 (もっと読む)
(もっと読む)
移動棚
【課題】 入出庫の際に、荷役車両を運転するオペレータの負担を軽減して、荷役作業の効率を向上することが出来る移動棚を提供する。
【解決手段】 移動棚3は、複数の物品棚1を互いに近接又は離反できるよう床5上に並列に配置し、隣合う2列の物品棚1を互いに離反させた状態で、両物品棚1の間の通路2を確保する。上記通路2両側の物品棚1にレーザ発光器11を設け、該発光器11により、上記通路2の入り口付近の床上に、該通路2の位置を示すライン状の光点6を形成する。オペレータは、この光点によって自分の車両の位置又は姿勢を確認しつつ、上記通路に進入する。
(もっと読む)
リサイクル処理管理システム
【課題】 指定引取場所で入力された廃家電品のような処理対象物に関する情報を再処理工程まで一貫して活用できるリサイクル処理管理システムを提供する。
【解決手段】 指定引取場所1で入力された処理対象物4に関する情報を指定引取場所1と再処理工場10を含んで構築された第1のネットワーク18を介して再処理工場10でも利用できるようにする。処理対象物4に関する情報を入力する作業を指定引取場所1でのみ行うことにより、入力作業の簡素化を実現するとともに入力間違いをなくすことによって作業効率の向上および情報精度を向上させることができるものである。
(もっと読む)
配車計画支援システム
【課題】 制約条件下で、輸送車両の洗浄時間を短縮化し、かつ輸送コストを最小化して、最適化された配車計画の立案を支援する配車計画支援システムを提供する。
【解決手段】 本配車計画支援システム10は、コンピュータによって数理計画法の最適化問題を解くことにより、輸送車両の洗浄時間を最短化し、配送コストを最小化した、最適化な配車計画を立案する。システムは、受注オーダ・ファイル12及びデータベース14として機能する記憶装置と、車両候補リスト作成部16、最適化計算部18及び配車計画決定部20として機能する演算装置とを備える。車両候補リスト作成部は、受注オーダ・ファイル及びデータベースから受注オーダ情報、制約条件データ、及びコストデータを読み出し、受注オーダの液・粉状製品の輸送に必要な複数の輸送車両候補を受注オーダ毎に作成する。最適化計算部は、配車計画の経済性を目的関数とした数理計画法により、輸送車両候補について最適化計算し、最終の輸送車両候補を定める。配車計画決定部は、最適化計算結果に基づいて、輸送車両の配車計画を決定し、出力する。
(もっと読む)
61 - 72 / 72
[ Back to top ]