
Fターム[3F044CE46]の内容
コンベア間の中継 (1,950) | 中継台車 (317) | 台車と他の部材との関連 (21) | 台車を固定、位置決めする手段付 (7)
Fターム[3F044CE46]に分類される特許
1 - 7 / 7
フィルム材の貼合装置
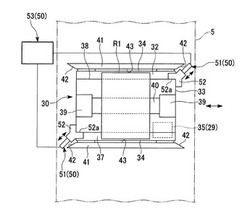
【課題】設置スペースを最小限に抑えつつ、周辺での作業に支障をきたすことがないフィルム材の貼合装置を提供する。
【解決手段】 液晶パネルを搬送するローラコンベア5と、液晶パネルの表裏面に貼合される偏光フィルムの偏光フィルムシートをロールR1から巻き出すと共にハーフカットして切り出す搬送装置と、ロールR1を支持する搬送台車30を備え、搬送台車30がロール収容エリアとローラコンベア5下方のロール配置位置との間を移動可能に設けられ、搬送台車30は、走行するべース部32とこのベース部32上でロールR1を支持するロール支持部33とを備え、ベース部32に対してロール支持部33が水平面内で姿勢変化可能に支持され、搬送台車30とローラコンベア5との間に、ローラコンベア5に対してロール支持部33を位置決めするエアー浮上装置29及び水平方向位置決め装置50が設けられている。
(もっと読む)
搬送システム、走行車

【課題】単数の測距装置で走行車の位置と姿勢を測定する。
【解決手段】ステーション110と、目標位置に目標姿勢で停止する走行車140と、荷物を移載する移載手段170とを備える搬送システム100であって、ステーション110と走行車140との距離を測定する測距手段141を単数と、測距手段141の測距対象となる第一測距部111、及び、第二測距部112と、第一測距部111との第一距離を取得し、走行車140を所定距離かつ所定方向に走行させ、第二測距部112との第二距離を取得する制御部151と、前記第一距離と前記第二距離とに基づき走行車140の目標姿勢からの傾きである傾き値を算出する算出部152と、傾き値に基づき移載手段170の移載条件を決定する移載条件決定部153とを備える。
(もっと読む)
育苗箱搬送装置
【課題】育苗箱受け渡し部又は育苗箱受け入れ部と搬送台車との間での育苗箱の移動を効率よく行うことができる育苗箱搬送装置を実現する。
【解決手段】育苗箱搬送装置において、移動可能な搬送台車6と、育苗箱受け渡し部5又は育苗箱受け入れ部165と搬送台車6との間を移動可能な補助搬送台車150とを備え、補助搬送台車150により育苗箱受け渡し部5又は育苗箱受け入れ部165と搬送台車6との間で育苗箱Cを移動可能に構成する。
(もっと読む)
搬送車システム
【課題】搬送車を、ステーションに対し正確に停止させる。
【解決手段】荷台8がステーション4の中央部に存在しない場合、一方のプッシャーがステーション4に先に当接するので、その反力により荷台8は左右方向にスライドする。そして一対のプッシャー20,20が共にステーション4に当接すると、スプロケット14,15は回転しなくなり、これをロータリエンコーダなどで検出する。次にモータを僅かに逆転させて、プッシャー20とステーション4との当接を解除し、モータを停止させロックする。この時、荷台8はステーション4の中央部に位置決めされており、パンタグラフを用いて荷台8を上昇させると、ロールを荷台8に対して、センタリングした状態で位置決めできる。
(もっと読む)
親子台車
【課題】 親台車と処理槽との間で子台車を走行して出し入れするために、親台車と処理槽との接続を容易に実現する。また、親台車または処理槽へ子台車を載せ込んだ際、手動操作を要することなく、自動で子台車を親台車または処理槽に係止する。
【解決手段】 親台車6の前端部には、処理槽3との間を架け渡すための渡し板28が、枢軸30まわりに揺動可能に設けられる。ストッパ21は、子台車7が走行する前後方向へ延出する部材とされ、子台車7の後端部において、左右方向へ沿う支軸49まわりに揺動可能に設けられ、自重により前端部を下方へ落として傾斜して設けられる。処理槽3から親台車6への載せ込み、または親台車6から処理槽3への載せ込みに伴い、ストッパ21の前端部は、係止部22,53に設けた傾斜面27,57で乗り上げて、係止部22,53に設けた凹部25,56にはまり込む。
(もっと読む)
無人搬送車の退避装置
【課題】無人搬送車を容易に且つ短時間で走行路の外に退避させることができる無人搬送車の退避装置を提供することを課題とする。
【解決手段】無人搬送車11が所定区間の複数の台車の下を通過しているときに故障などの異常を発生して停止した場合には、作業者が無人搬送車11の操作部18を操作して挿入ピン17を下降させ、挿入ピン17の下端部を溝12内に挿入すると、挿入ピン17の下端部が、溝12内に収容されたチェーン13を構成している多数のチェーン要素19のうち挿入ピン17の直下に位置する1つのチェーン要素19に挿入されて係止される。このとき、解放機構により無人搬送車11の駆動部が自動的に解放される。その後に、作業者は、チェーン13を保持して牽引することにより、挿入ピン17を介して無人搬送車11を溝12に沿ってその走行方向に移動させ、複数の台車の下から引き出す。
(もっと読む)
搬送装置
物品を生産または加工するラインの途中に設置され、上流側装置から下流側装置へプリント基板を搬送する搬送装置(10)は、該搬送装置のベース部(20)と、該ベース部上で前記上流側装置と前記下流側装置との間を往復移動する移送部(30)と、該移送部の上端部に設けられ、前記上流側装置から受け取った物品を前記下流側装置に引き渡す物品受渡機構(40)と、前記移送部(30)を往復移動させる駆動機構とからなっている。この搬送装置(10)は、移送部(30)の位置に応じて上流側装置と移送部(30)との間または下流側装置と移送部(30)との間に作業者等が前記ラインを横断できるスペースが形成されるように構成されている。 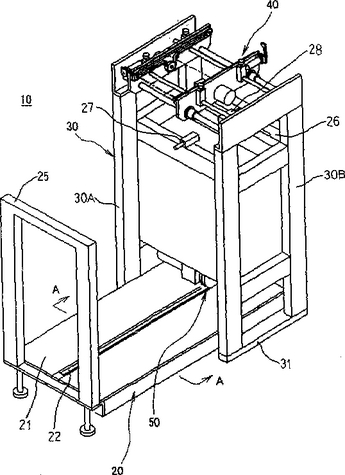 (もっと読む)
(もっと読む)
1 - 7 / 7
[ Back to top ]