
Fターム[3F070EC01]の内容
コンベア間の分岐・合流、特殊移送 (1,839) | 移送、分岐・合流−回動部材 (77) | 水平軸まわり (6)
Fターム[3F070EC01]に分類される特許
1 - 6 / 6
PTPシートの抱き合わせ装置における位置ずれ調整装置
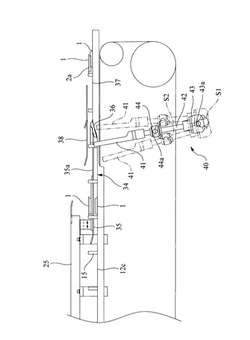
【課題】 様々な種類のPTPシートに容易に対応することができ、作業効率の向上を図ることができるPTPシートの抱き合わせ装置における位置ずれ調整装置
【解決手段】 PTPシート1がポケット部2aを下向きにして搬送される上搬送路34と、PTPシート1がポケット部を上向きにして搬送される下搬送路35と、それら上搬送路と下搬送路の下流側でそれぞれの搬送路を搬送してくるPTPシートを抱き合わせる合流部と、を備える。上搬送路と下搬送路のPTPシートは、合流部までは同一の押送フィンガー15によって同時に搬送される。合流部は、下搬送路に対して出没可能に設けられるとともに、PTPシートの搬送方向と同一方向であって、押送フィンガーの速度よりも速く移動し、その移動途中で押送フィンガーを追い越してPTPシートを送り出す送り爪41を有するPTPシート送り装置40を設けた。
(もっと読む)
物品の搬送位置補正装置と補正方法、及び同装置を用いた物品の仕分け設備

【課題】物品Bがメイン搬送路1上で位置ずれを起こしても、その位置ずれを送出ローラ43で積極的に補正することができる、物品の搬送位置補正装置4と補正方法、及び同装置を用いた物品の仕分け設備10を提供すること。
【解決課題】物品Bをローラコンベヤの搬送下流側へ送り出す送出ローラ43と、送出ローラ43を駆動回転させる駆動手段と、送出ローラ43よりも搬送上流側において物品Bを検出する検出手段45と、検出手段45により検出した物品Bの実際の搬送位置と予め設定された正規の搬送位置とを比較し、両者が位置ずれしているとき、送出ローラ43の回転速度を増減速させて該物品Bの送出ローラ43による送出速度をローラコンベヤによる搬送速度よりも大きくし或いは小さくする制御手段46とを設けた。
(もっと読む)
搬送物姿勢制御装置及び制御方法
【課題】搬送物の間隔が狭くかつ高速搬送においてもその搬送物の姿勢を自在に変更でき、また搬送物ごとの仕分け方向に迅速に対応できる搬送物姿勢制御装置を提供する。
【解決手段】個別に制御可能な複数のセルを平面状に配置した搬送物の姿勢制御装置であって、前記各セル5には1対の搬送ローラ6間に架けられたベルト8を回転させるベルト駆動手段と、前記各セルを、水平方向に首振り回転させる首振り駆動手段と、前記各セルのベルトの前方又は後方の少なくとも1方に搬送物を検知するセンサ9とを備え、前記センサの検知出力に応じて、前記ベルト駆動手段と首振り駆動手段とを独立して制御可能に構成したことを特徴とする。
(もっと読む)
切板通板パス切替え装置
【課題】電磁マグネットロールおよび電磁マグネットコンベアを選択的に励磁することにより切板の通板パスを切替える切板通板パス切替え装置において、通板パス切替えの際の残留磁場による切板先端の突っかかり等のトラブル発生を防止でき、通板パス切替え部の通板速度を上げることができるようにすること。
【解決手段】切板11の通板パスA,Bの上下に電磁マグネットロール3a、3bを設け、その出側の上下に電磁マグネットコンベア4a、4bを設けた切板通板パス切替え装置において、電磁マグネットロール3a、3bおよび電磁マグネットコンベア4a、4bの励磁力を、通板する切板11の厚みと通板パス切替え部の最大通板速度に応じて変化させる制御装置10を設けた。
(もっと読む)
循環搬送路におけるバイパス搬送装置
【課題】 搬送時において落下した塵芥の清掃を容易に行うことができるとともに、塵芥が落下しても搬送部材の駆動に支障をきたす虞が無い循環搬送路におけるバイパス搬送装置を提供すること。
【解決手段】 飲食物を循環搬送する循環型飲食物搬送装置にて構成される無端状の循環搬送路間を接続して飲食物の循環搬送経路を短縮させるバイパス路を構成するバイパス搬送装置10は、飲食物を搬送する搬送部材13を有する搬送ユニット11と、搬送ユニット11の下方に配置され、搬送部材13を駆動する駆動手段14を有する駆動ユニット12と、搬送ユニット12と駆動ユニット11との間に配置され、搬送部材13から落下する塵芥等を受ける塵芥受板15と、から構成され、搬送ユニット11は駆動ユニット12に対し分離自在に構成されている。
(もっと読む)
コンベヤと接近している物品類を脇へそらす方法
コンベヤにそって接近して搬送される複数の物品(40)の搬送向きを変えるコンベヤ(10)と関連した方法。このコンベヤは、ベルト走行方向(14)に対し斜めになっている軸(26)まわりを回転するような向きになっている複数のローラ(24)をもつコンベヤベルトを含む。一連の列をなすベアリング面要素(32)が前記コンベヤにそって端部から端部にわたっている。これらベアリング面は、動かなかったり、または、回転するようになっている。各列は、ローラ制御域を構成し、この域内で各列は、ベルトローラ(24)と接触するそのベアリング面要素で作動したり、または、前記ベルトローラとの接触状態をもたないそのベアリング面要素で不作動になる。前記ベルトが作動状態のローラ制御域を通過すると、前記ベルトローラは、回転して搬送物品を前記ベルトの一方の横側へ押し進める。連続したローラ制御域がシーケンシャルに作動状態になるか、または、不作動状態になり物品類を前記ベルトの一方の横側へ押しやり、該ベルトから押し出すか、または、物品類をそのまま真っすぐに進行させる。 (もっと読む)
1 - 6 / 6
[ Back to top ]