
Fターム[3F101CA03]の内容
ベルト、ローラ以外の手段による供給 (12,764) | 挟持具の動き (290) | 直進動 (86) | 水平動 (43) | 2方向以上へ (11)
Fターム[3F101CA03]に分類される特許
1 - 11 / 11
用紙後処理装置
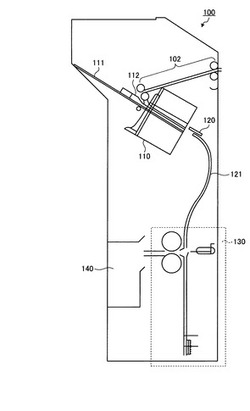
【課題】用紙束の端部を挟んで掴む把持部材を移動させることで用紙束の端部でズレが生じないように搬送し、自由曲線のような複雑な搬送経路であっても把持部材の向きを制御可能とすることで用紙への機械負荷を低減させて用紙後処理品質を確保し、かつ、曲線経路上で用紙束を曲げて綴じを行うことで機械幅を小さくする。
【解決手段】処理対象の用紙を受け入れ、この用紙に対して所定の後処理を行う用紙後処理装置100であって、用紙束の端部を把持し、湾曲経路を移動する用紙把持移動部120と、把持移動部120により把持されて前記湾曲経路の所定位置に停止された用紙束を綴じるステイプル110と、を備える。
(もっと読む)
折り畳み装置に対する矩形状生地部材の供給方法及び装置

【課題】折り畳み装置に対して矩形状の生地部材を供給する方法及び装置を提供する。
【解決手段】折り畳み装置に対する矩形状生地部材の供給方法であって、折り畳み装置に備えた搬入コンベアの上流側の搬送コンベア9上へ載置供給した生地部材1の角部に備えたマーカー5Aを搬送手段23に備えたハンド25により持上げて搬入コンベア11側へ搬送する。生地部材1を搬入コンベア11上へ移載するための移載装置29に備えた一方のグリッパー37によってマーカー5Aに近接した位置をクランプすると共に、移載装置29における他方のグリッパー39によって別個のマーカー5Bをクランプする。一方のグリッパー37を、搬入コンベア11の上方を横断する方向へ移動し、他方のグリッパー39を搬入コンベア11の上方へ移動すると共に両方のグリッパー37、39を搬入コンベア11の搬入方向へ移動しつつ生地部材1のクランプを開放する。
(もっと読む)
搬送機構
【課題】所望の中間搬送位置に被搬送物を搬送可能な、簡易で且つ安価な構成の搬送機構を提供する。
【解決手段】圧縮エアにより第一の搬送位置Aと第二の搬送位置B間を選択的に往復動するピストン部材54とを含むエアアクチュエータ50と、ピストン部材54に連結され被搬送物を保持する保持手段と、を具備する。第一の搬送位置Aと第二の搬送位置Bとの間の所望の位置に少なくとも1個の中間搬送位置Mを有し、中間搬送位置に対応して停止手段52が配設されている。当接部材66が作用位置に位置づけられると、エアアクチュエータ50によって移動される保持手段が当接部材66に当接することによって保持手段の移動が停止され、当接部材66が非作用位置に位置づけられると、保持手段が当接部材66に当接することなく移動することができる。
(もっと読む)
塗布装置及び塗布方法
【課題】塗布不良を防止することができ、基板搬送部上を清浄に保持することが可能な塗布装置及び塗布方法を提供すること。また、装置の構成部材の破損、故障などの不具合を回避することが可能な塗布装置を提供すること。
【解決手段】基板Sを保持する保持部23bを有し基板を保持した状態で搬送する搬送機構23が基板搬送部に設けられており、当該基板を保持部に押圧する補助機構24を備えることとしたので、搬送機構の保持部に加えて補助機構によっても基板を保持することができる。このため、基板がより強く保持されることになり、その分基板のズレが抑制されることになる。これにより、基板のズレに伴う塗布不良を防止することができ、基板搬送部上を清浄に保持することが可能となる。
(もっと読む)
変形性薄物展開装置
【課題】人手で布地等の把持作業が行われる場合、その把持作業を従来よりも簡素化することができ、自動制御で布地等の把持作業が行われる場合、布地等を把持するまでの工程を比較的少なくすることができる展開装置を提供する。
【解決手段】布地の展開装置は、展開機構状態変化機構であるロボット本体と、ロボットハンド2Aを含む。ロボットハンド2Aは、2組のハンド機構21と、それらを接近離反させる第11スライド機構22A、第12スライド機構22Bを含む。ハンド機構21は1対のフィンガ部21Aを有する。布地CLを把持するときは、2組のハンド機構21を接近させフィンガ部の先端が斜め上方又は真横を向く状態とした後にフィンガを閉じて布地を把持し、その後把持したまま第11スライド機構22Aと第12スライド機構22Bによってハンド機構21を離間させる。
(もっと読む)
変形性薄物展開装置
【課題】本発明の課題は、人手で布地等の把持作業が行われる場合、その把持作業を従来よりも簡素化することができ、自動制御で布地等の把持作業が行われる場合、布地等を把持するまでの工程を比較的少なくすることができる展開装置を提供することにある。
【解決手段】本発明に係る展開装置1,2は、展開機構2Aおよび制御装置4を備える。展開機構は、複数のハンド部21および第2接近離間機構22を含む。ハンド部は、一対のフィンガ部21Aおよび第1接近離間機構21Bを有する。第1接近離間機構は、一対のフィンガ部の対抗方向を含む面(以下「第1面」という)に沿って一対のフィンガ部を接近/離間させる。第2接近離間機構は、第1面と直交する方向に沿って同一直線上でハンド部を接近/離間させる。制御装置は、ハンド部を第1距離まで接近させた後、フィンガ部が第11距離まで接近された状態でハンド部を第1距離よりも長い距離離間させる。
(もっと読む)
棚装置及び製品パレットへのワーク載置方法
【課題】予めX,Y軸方向の原点位置決めを行ったワークを、加工パレットに対して載置することのできる棚装置を提供する。
【解決手段】棚装置において、一枚取り位置に上下動自在に備えたワーク吸着装置23をX軸方向へ移動自在に備えると共に、前記ワーク吸着装置23に保持されたワークWを当接して当該ワークWのX軸方向の位置決めを行うためのX軸方向ストッパ41を備え、前記ワーク吸着装置23から受け取ったワークをY軸方向へ移動位置決め自在なワーク移動手段57を備えたフォーク装置45を、前記ワーク吸着装置23の下側において上下動自在に備え、このフォーク装置45の下方位置に備えた加工パレット53に対して前記フォーク装置45を相対的に下降して、XY方向の位置決めを予め行ったワークを前記フォーク装置45から前記加工パレット53上に直接載置自在に構成してある。
(もっと読む)
薄板材搬送装置
【課題】本発明は、可撓性を有する矩形の薄板材を高精度に搬送位置決めする薄板材搬送装置を提供することを目的とするものである。
【解決手段】矩形の薄板材1を保持部6で取出位置3から取出して吸着保持し、この保持部6および薄板材1をY方向移動部20でY方向に移動搬送し、この搬送途中で、第一前方端辺検出非接触センサ21、第二前方端辺検出非接触センサ22と側方端辺検出非接触センサ23で、薄板材1の前方端辺1aおよび側方端辺1bを検出し、この検出結果に基づいて薄板材1を位置決めし、その後、この薄板材1をさらにY方向に移動搬送させ、所定の位置決め位置5に搬送位置決めする構成とした。
(もっと読む)
布片を送給する装置
本発明は、布片を布処理装置に送給する装置(1)に関する。前記装置(1)は、前記布片の前縁を真っ直ぐに伸ばすために互いに離れる方に移動可能となるように、かつ前記布片をコンベヤ(40)に引き渡すように構成された一組または複数組のスプレッダークランプ(20)を備えている。少なくとも一組のスプレッダークランプは、受取り位置(M)と引渡し位置(A)との間で移動するように構成されている。スプレッダークランプは、受取り位置(M)において、コンベヤ(40)に対する第1の所定方位を有している。スプレッダークランプ(20)は、引渡し位置(A)において、真っ直ぐに伸ばされた布がコンベヤ(40)と実質的に平行になる第2の所定方位を有している。従って、布片を装填ステーション(70)の無作為な送給位置からスプレッダークランプ(20)に受け取らせることができる。 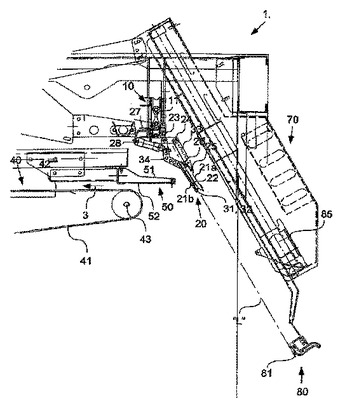 (もっと読む)
(もっと読む)
シート束搬送装置及びこれを用いた製本装置
【課題】シートを束状に積み上げて整合するトレイ位置から次工程の処理位置までシート束をグリップして束が崩れることなく、またシート束に耳折れなどの棄損を起こすことがなく、しかも搬送機構が比較的簡素であるシート束搬送装置を提供する。
【解決手段】排紙経路からのシートを略々水平姿勢で積載するトレイ手段と、このトレイ手段上のシート束を所定方向に搬出する第1のグリップ搬送手段と、この第1のグリップ搬送手段からの略々水平姿勢のシート束を垂直姿勢に旋回する第2のグリップ搬送手段とを備えてグリップ搬送装置を構成する。そして、上記第1のグリップ搬送手段はシート束を把持するクランプ部材で上記トレイ手段に沿ってシート束を搬出するように構成する。また上記第2のグリップ搬送手段はシート束を把持するクランプ部材でシート束を所定角度旋回して略々垂直姿勢で上記後処理手段に移送するように構成する。
(もっと読む)
袋詰め包装機への包袋供給装置
【課題】ロータリ包装機におけるクランパーに対して、待機機構に積層する包袋を能率よく供給する装置。
【解決手段】傾斜する滑り板70の滑り面に対して、第2真空カップ13の回転15で包袋10を移乗させると、ほぼ同時に、前記滑り板70が直立するのを待機する挟持爪41は、滑り板70が支持する包袋10の袋口を掴み、かつ該包袋10を矢印42のごとくロータリ包装機のクランパー43に移送する。前記滑り板は、該滑り板が起立して包袋を挟持爪に託し、該挟持爪が前記包袋をクランプに移送している間に元の状態に傾斜して新しい包袋の供給を受けので能率が向上する。
(もっと読む)
1 - 11 / 11
[ Back to top ]