
Fターム[3F115CB06]の内容
パッケージ・線条体の安全装置 (910) | 検出対象(入力) (202) | 糸走行状態検知 (95) | 走行速度 (12)
Fターム[3F115CB06]に分類される特許
1 - 12 / 12
糸センサ、及び、この糸センサを備えた繊維機械
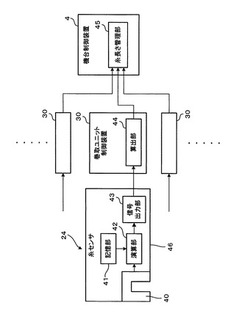
【課題】固有の検出特性のバラツキの影響を補正によって除去するとともに、交換の度にその補正情報を設定することが不要な、糸センサを提供すること。
【解決手段】糸センサ24は、走行する糸Yの走行速度に対応した検出信号を発信する検出部40と、検出部40に固有の補正情報を記憶する記憶部41と、検出部40から発信された検出信号を、記憶部41に記憶された補正情報を用いて補正する演算部42と、演算部42で補正された後の補正済み信号を出力する信号出力部43とを備えている。
(もっと読む)
糸条の走行監視装置

【課題】本発明の目的は、目飛びなどの糸条の走行異常の検出用閾値を作業者の負担なく設定できる糸条の走行監視装置を提供することにある。
【解決手段】糸条の走行異常を判断する判断手段が、閾値検索をおこなう期間を設定する閾値検索時間設定部と、設定された閾値検索時間内に検出した糸条の一定送り量ごとのパルス数を閾値設定用パルス数として記憶する閾値設定パルス数記憶手段と、前記閾値設定用パルス数に基づいて走行異常を判断する閾値を設定する閾値設定手段と、を含む糸条の走行監視装置。
(もっと読む)
糸巻取装置及びそれを備える自動ワインダ
【課題】糸欠陥検出器を通過する糸送り量を正確に算出して糸欠陥の検出精度を向上させることができる糸巻取装置を提供する。
【解決手段】巻取ユニット10は、パッケージ30に巻き取られる前の糸20を貯留するための糸プール部71と、糸プール部71に糸20を供給するために駆動されるサーボモータ55と、を備える。また、巻取ユニット10は、糸欠陥を検出するために糸プール部71の上流側に配置されるクリアラ15を備える。そして、巻取ユニット10は、糸プール部71より上流側の糸送り量に基づいて、クリアラ15を通過した太さムラの長さを計算する。
(もっと読む)
糸巻取機
【課題】糸の異常な走行状態を検出することが可能な糸巻取機を提供する。
【解決手段】自動ワインダは、パッケージ駆動モータ41と、周速検出部51と、糸速度センサ60と、ユニット制御部50と、を備える。パッケージ駆動モータ41は、糸20が巻き取られる巻取ボビン22を回転駆動する。周速検出部51は、パッケージ回転センサ43が検出した巻取ボビン22の回転数と、角度センサ44からの信号に基づき求められたパッケージ30の径と、に基づき、パッケージ30の周速を検出する。糸速度センサ60は、糸20の走行速度を検出する。ユニット制御部50は、周速検出部51が検出したパッケージ30の周速と糸速度センサ60が検出した糸速度とが予め設定された相関性を有するか否かを判定する。
(もっと読む)
糸品質測定器及び糸巻取機
【課題】正確な糸欠点長さ評価及び周期ムラの検出が可能な糸品質測定器及び糸巻取機を提供する。
【解決手段】自動ワインダを構成するワインダユニット10は、クリアラ(糸品質測定器)15を備えている。このクリアラ15は、速度を変化させながら走行する紡績糸20の太さムラを検出し、糸の太さムラの検出を行っている。このとき、糸速度に応じてサンプリング周波数を変化させて検出信号のサンプリングを行っている。クリアラ15は、走行する糸の太さを検出する第1の糸ムラセンサ43と、CPU47と、を備える。CPU47は、外部の回転センサ42から得られる糸速度信号を受信し、当該糸速度信号に応じたサンプリング周波数で第1の糸ムラセンサ43の信号のサンプリングを行う。
(もっと読む)
糸条の走行監視装置
【課題】本発明の目的は、毛羽が存在しないかあるいはほとんど存在しないフィラメント糸の走行を監視することができる装置を提供することにある。
【解決手段】走行監視装置10は、走行する糸条12に光Lを照射する光源14と、糸条12に対して光源14とは反対方向に配置された差動型空間フィルタ素子16と、差動型空間フィルタ素子16の出力から糸条12の走行の有無を判断する信号処理回路18とを含む。本発明は糸条12の走行を監視するために、受光素子20a、20bのピッチを糸条12の凹凸の大きさと略同じとしている。
(もっと読む)
紐状物製造装置
【課題】本発明の目的は、伸縮性(外径変化)が抑制された紐状物を、生産性良く製造できる装置を提供する。
【解決手段】糸11を丸編みして編紐12を編成する丸編機2と、丸編機2から排出された編紐12が通過する貫通孔を有し、該貫通孔内の編紐12を加熱処理する熱処理金型4と、前記貫通孔を通過した編紐12を引取る引取機5と、丸編機2の製紐速度と、前記貫通孔に導入される編紐12の導入速度との差を検出する検出手段(センサー6a、6b)と、該検出手段における検出結果に基づいて丸編機2における製紐速度を制御するフィードバック制御手段を備えたことを特徴とする紐状物製造装置。
(もっと読む)
糸条の走行監視装置
【課題】本発明の目的は、合繊糸などの糸条であっても、非接触で正確にその走行が監視できる装置を提供することにある。
【解決手段】糸条の走行監視装置10は、糸条12に照射する光Lを発光する光源14と、光Lを糸条12に垂直に照射し、糸条12からの反射光を光源14とは異なる方向に導く導光手段16と、糸条12からの反射光を撮像素子18で受光し、撮像素子18の出力の単位時間ごとの相対変化から糸条12の動きを検出する手段20と、を含む。
(もっと読む)
ワイヤー張力検出装置
【課題】ワイヤーによってテンションアームが細かく振動させられても、ワイヤーが、テンションアームに取り付けられた遥動プーリーから外れないようにしたワイヤー張力検出装置を提供すること。
【解決手段】テンションアーム3が遥動すると、フック部材5も一緒に回転するため、引張コイルばね7によってひずみゲージ6の応力が変化させられる。それによってモーター9の回転速度が制御され、スプール10からのワイヤー15の巻き出し速度が、所定の線速と常に同じになるようにさせられる。スプール10から巻き出されたワイヤー15は、テンションアーム3に取り付けられた2個の遥動プーリー4と固定部材に取り付けられた2個の固定プーリー8との間に交互に掛け渡され、引張コイルばね7のばね定数は、遥動プーリー4が1個の場合のほぼ2倍になっている。
(もっと読む)
糸巻取機の糸監視装置
【課題】巻取ボビン6,7を回転駆動するパッケージ駆動モータ41と、このモータ41とは切り離されて駆動し、前記糸巻取の際に糸を綾振るためのトラバース装置5とを備えた糸巻取機において、糸欠点を正確に検出できる糸監視装置を提供する。
【解決手段】糸監視装置63は、糸監視器15の監視結果と糸速度検出手段61の速度検出結果に基づいて糸欠点を検出する。糸速度検出手段61は、巻取チューブ6に糸4が巻き取られて形成された糸層の周面の周方向の糸層周面移動距離ΔPLsの検出手段73と、糸層の幅方向の糸のトラバース移動距離ΔTLsの検出手段74と、糸層周面移動距離演算手段73で検出されたΔPLsとトラバース移動距離演算手段74で検出されたΔTLsをそれぞれ入力し、これらから単位時間当たりの糸層周面移動距離及びトラバース移動距離を各々計算し、その結果に基づいて糸の走行速度を求める糸速度演算手段77と、を備える。
(もっと読む)
糸巻取装置の糸速度検出装置、及びトラバース装置の糸綾振り速度検出装置
【課題】糸巻取用の巻取ボビン6,7を回転駆動するパッケージ駆動モータ41と、このモータ41とは切り離されて駆動し、前記糸巻取の際に糸を綾振るためのトラバース装置5とを備えた糸巻取装置において、糸の走行速度を精度良く検出できる糸速度検出装置を提供する。
【解決手段】巻取ボビン6,7に糸4が巻き取られて形成された糸層の周面の周方向の糸層周面移動距離ΔPLsを検出する手段73と、糸層の幅方向の糸のトラバース移動距離ΔTLsを検出する手段74と、糸層周面移動距離演算手段73で検出されたΔPLsとトラバース移動距離演算手段74で検出されたΔTLsをそれぞれ入力し、入力されたΔTLs及びΔPLsから、糸がnトラバースストローク分(n≧1)移動するのに必要な時間当たりの糸層周面移動距離及びトラバース移動距離をそれぞれ計算し、この計算結果に基づいて糸の走行速度を求める糸速度演算手段77と、を備える。
(もっと読む)
同心円芯鞘複合繊維のチーズ状パッケージおよび製造方法
【課題】 生産性がよく、布帛にしたときに均一な表面感、染色の均一性が得られるポリエステル芯鞘型複合繊維が巻きつけられたパッケージを提供する。
【解決手段】 ポリエチレンテレフタレートを主成分とするポリエステルを芯成分に配し、ポリトリメチレンテレフタレートを主成分とするポリエステルを鞘成分に配した、長手方向に同心円芯鞘断面形状を有する複合繊維が巻き付けられ、以下の(1)〜(3)の条件を満たすことを特徴とするチーズ状パッケージ。
(1)チーズ状パッケージのふくらみ率が−5〜5%
(2)チーズ状パッケージの耳高率が0〜5%
(3)ふくらみ率の経時変化率が50%以下
(もっと読む)
1 - 12 / 12
[ Back to top ]