
Fターム[3G093EA03]の内容
車両用機関又は特定用途機関の制御 (95,902) | 制御対象(機関) (9,786) | 機関出力 (3,920) | 機関の回転数(回転速度) (1,452)
Fターム[3G093EA03]に分類される特許
1,441 - 1,452 / 1,452
建設機械の油圧駆動制御装置及び方法
建設機械において、作業機がどのように操作されても、作業機の動作速度が変動しないようにするための制御が行われる。異なる操作種類に対応して異なるエンジン出力制御ラインT0〜T3及び異なるポンプトルクラインM1〜M4が定義される。エンジン出力制御ラインT0〜T3とポンプトルクラインM1〜M4とのマッチング点はどれも、一定のエンジン回転数N1を指定する。現在行われている操作種類に応じて、一つのエンジン出力制御ラインと一つのポンプトルクラインが選択される。選択された両ラインのマッチング点での馬力値に、冷却ファン等の補助機の要求馬力を加えた馬力に相当する等馬力ライン上でエンジンの出力馬力が制御される。選択されたポンプトルクライン上で作業機用油圧ポンプの吸収トルクが制御される。操作種類が変わっても、補助機の要求馬力が変動しても、エンジンは一定の回転数N1で動作する。 (もっと読む)
オールスピードガバナを搭載したエンジンのためのトルク速度制御方式
自動車(20)が、ディーゼルエンジン(22)と、自動車の作動に関連したデータ(CAN_TSC_OCM,CAN_TSC_OCM_SA11)を提供する1つ以上のソース(30,36)とを有し、これらソースは、エンジン(22)の外部に位置するが、エンジン(22)の燃料供給に潜在的に影響を及ぼす。エンジン制御システム(24)は、エンジン燃料供給(66)の制御のためにオールスピード調速方式(52)に従ってデータを処理してオールスピード調速燃料供給データ(MFGOV)を作成し、このオールスピード調速燃料供給データ(MFGOV)は、1つ以上のソースからのエンジン制御システム(24)へのデータ入力が、エンジン燃料供給(66)に影響を及ぼす必要がないことを示すと、エンジン燃料供給(66)をセットする。かかる1つ以上のソースからのデータ入力が、エンジン燃料供給(66)に影響を及ぼす必要のあることを示すと、このデータ入力は、エンジン燃料供給(66)をオールスピード調速方式(52)とは別の方式、特に、トルク速度制御方式(54)によって設定する。  (もっと読む)
(もっと読む)
排気物質の低減のためのエンジン制御システム
一定速度に対しエンジンスピードを調節するステップと、エンジンの空燃比を維持するステップと、エンジンから、触媒(32)を収容する排気システム(16、18、40、65、80)を通して排気を流すステップと、触媒(32)の上流に配置された第1のセンサ(19)で第1の変数を監視するステップと、エンジン(12)の空燃比を第1の変数の関数として制御するステップと、を含む内燃機関(12)からのエミッションを制御する方法。1つの用途では、エンジン(12)は、発電及び推進を含む船舶用途用に構成される。  (もっと読む)
(もっと読む)
クラッチ−独立動力取出装置の回転速度調整方法
クラッチ−独立動力取出装置(32)における回転速度を調整する方法である。動力取出装置(32)は、車両に設けられているエンジン(1)によって駆動される。エンジン(1)は自動ステージギア変速機(9)に自動車両クラッチ(3)を介して連結されている。変速機(9)、車両クラッチ(3)及びエンジン(1)を制御するために少なくとも一つの制御ユニット(45)が設けられている。制御ユニット(45)は、エンジン(1)の回転速度をスロットルレバー(61)の位置の関数として制御し、ギアセレクタ(46)の位置の関数として変速機(9)を制御する。動力取出装置(32)が係合され、ギアセレクタ(46)によってドライブポジションが選択されているときは、エンジン(1)の回転速度は、制御装置(60)によって制御され、車両クラッチ(3)の係合の程度はスロットルレバー(61)により制御される。動力取出装置(32)に係合している装置が制限位置に近づくと、エンジン(1)の回転速度は自動的に減速される。 (もっと読む)
作業車両用エンジンのパワー出力の制御方法及び制御装置
【課題】 エンジン制御装置40は、建設機械などの作業車両の作業の状態を検出して自動的にエンジンのパワー出力能力を制御する。アームの油圧シリンダ13の油圧検出器45、アームやバケットの操作指令の検出器32,33、変速機23のシフト操作検出器31、車体の傾斜角検出器46、走行加速度検出器47、アクセル開度検出器48からの検出信号に基づいて、掘削又は登坂走行が行われているか判定される。判定の結果、掘削又は登坂走行が行われている時は高パワー出力能力で、それ以外の時は低パワー出力能力で、エンジンが運転される。 (もっと読む)
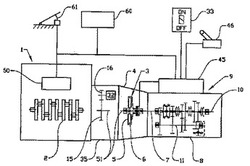
車両のエンジンの始動方法

【課題】 停止中の車両が始動過程において意に反して動き出すことがないことを保証する、車両のエンジンの始動方法を提供する。
【解決手段】 車両(1)のエンジン(5)の始動方法において、始動希望がある場合、車両(1)が停止しているかどうかが検査され、車両(1)が停止している場合、少なくとも1つの車両ブレーキ(10)が作動される。車両ブレーキ(10)の作動後に、エンジン(5)の始動が開始される。
(もっと読む)
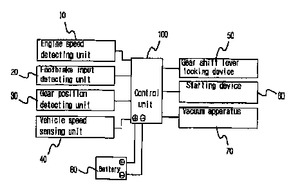
オートマチック車(AT車)を安全に発進させるためのシステム及びその方法
本発明は、事前に急発進事故の発生を防止する、AT車を安全に発進させるシステム及びその方法に関するものである。 該システムは下記を具備する。 エンジンの現回転数を検出するエンジン回転数検出ユニット10と、 フットブレーキが作動状態であるかどうかを検出するフットブレーキ入力検出ユニット20と、 シフトレバーがニュートラル(N)位置にあるどうかを検出するギア位置検出ユニット30と、 該フットブレーキ入力検出ユニットと並行して作動され、車両速度を感知する車両速度センサーユニット40と、 エンジン始動段階で、該フットブレーキが作動状態でなく、該シフトレバーがニュートラル位置になっていないときにはエンジンを始動させず、同時に、上記条件が満たされるようになっても、エンジン始動後にエンジン回転数が基準値未満に下がるまでは、該シフトレバーをニュートラル位置にシフトさせない制御装置100と、 該制御装置の制御下でエンジンを始動させる始動装置60と、 Hydro-vac内の空気を吸入し、該Hydro-vacを真空状態にするために、該制御装置100の制御下で作動される真空装置70。 エンジン始動段階では、該シフトレバーがニュートラル位置になく、該フットブレーキが非作動状態であるために安定した制動機能が無効になると、該エンジンは始動することが許されない。 エンジン始動後、上記条件が満たされた時に、該シフトレバーは、該エンジン回転数が基準値未満に下がるまで、ニュートラル位置から他の位置へシフトすることが許されず、それによって急発進が防止される。
 (もっと読む)
(もっと読む)
分離された機械的制御と電気的制御を有する動力装置の制御方法及び装置
本発明は、車両の動力装置の制御方法に関する。本発明は、動力装置による車両の特定の駆動モードに存する。エンジントルク抽出モードにおいては、本制御方法は、電気エネルギのバッファ要素の充電レベル(Ucapa)の測定値と、上記電気機械(Me111、Me212)の回転数(ωe1、ωe2)及び電気機械から供給されるトルク(Te1、Te2)の測定値のみを利用して、第1段階において、熱エンジンのトルク(Tice#)を計算し、車輪へ加えられるトルクと熱エンジンの回転数を同時に調整しながら、推定された機械的な特徴を表わす機械的な制御信号(u0)を作成し;次いで、第2段階において、機械的な制御信号に基づいて第1及び第2の電気機械のトルク(Te1#、Te2#)を計算し、エネルギレベルを調整するエネルギ的な制御信号を作成する;ことからなる。 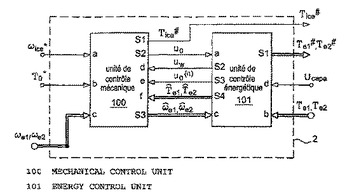 (もっと読む)
(もっと読む)
内燃機関の停止方法
本発明は内燃機関の停止方法を開示している。本発明によれば、内燃機関の停止プロセスが一旦開始されると、内燃機関は、画定された運転状態から停止する。画定された運転状態はクランクシャフトの所望の停止位置が得られるように選択される。本発明は自動車、特に乗用車に使用することができる。 (もっと読む)
エンジン発電機のインバータ装置
【課題】 整流回路の整流動作にかかわらず、エンジン回転数を常に正確に検知できるエンジン発電機のインバータ装置を提供する。
【解決手段】 回転数検出部35aは、制御電源34aの交流出力Voutを基準電圧Vrefと比較するコンパレータ351と、基準パルス発生部354と、交流出力Voutの周期を計測する周期計測部352と、基準電圧Vrefを0Vまたは所定のマイナス電圧に切り換える切換回路355とを含む。CPU30aは、電圧検知回路3111により検知される出力電圧に基づいて、サイリスタブリッジ回路311aの出力電圧が安定に維持されるように、SCRドライバ37aを付勢して各サイリスタの導通角を制御する。CPU30aは、SCRドライバ37aの付勢タイミングに同期してスイッチングトランジスタTrを導通させる。
(もっと読む)
車両の自動変速装置
【課題】 ダブルクラッチ制御でエンジン回転の上昇が遅いとき、その回転上昇を早め、変速時間の長期化及び変速不能を防止する。
【解決手段】 機械的なシンクロ機構を有しないメインギヤの変速に際し所定のシンクロ制御を実行し、且つ変速機のシフトダウンの際に所定のダブルクラッチ制御を実行するものにあって、ダブルクラッチ制御が、クラッチ断及びギヤ抜き後、エンジン回転を所定の目標エンジン回転まで上昇させてクラッチを接し、目標メインギヤ段におけるドグギヤ回転をスリーブ回転付近まで上昇させる制御を含み、ダブルクラッチ制御の開始から所定時間が経過してもなおエンジン回転が目標エンジン回転に到達しなかったときは、目標エンジン回転を高める制御を行う。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】 パラレルハイブリッド車両において、モータMG2の制御に起因する振動を抑制し、乗り心地を向上する。
【解決手段】 エンジン、モータMG1、モータMG2および車軸をプラネタリギヤを介して結合する。エンジンおよびモータMG1から出力された動力をモータMG2で補償して要求動力を車軸から出力する。この制御では、まず上記補償に必要なトルクをモータMG2の仮目標トルクとして設定する。この仮目標トルクになまし処理を施して目標トルクを決定する。車両の走行状態に応じてなまし処理の程度を変える。停車中にエンジンの始動が開始された場合は、高い応答性でモータMG2を制御して車軸へのトルク変動を適切に相殺する。通常走行中にはやや低い応答性でモータMG2を制御して運転者のアクセル操作に対し滑らかに出力トルクを変える。
(もっと読む)
1,441 - 1,452 / 1,452
[ Back to top ]