
Fターム[3G384DA10]の内容
内燃機関の複合的制御 (199,785) | 目的 (24,795) | 制御精度の向上 (3,991) | ハンチング防止 (123)
Fターム[3G384DA10]に分類される特許
1 - 20 / 123
EGR装置付き過給エンジンの制御装置
内燃機関の制御装置
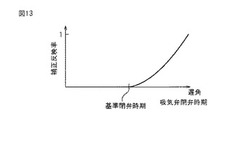
【課題】吸気弁の閉弁時期がかなり遅角側となっている場合であっても、回転数の収束性及び回転数制御の応答性を高く維持することができるようにする。
【解決手段】内燃機関は吸気弁7の閉弁時期を変更可能な可変バルブタイミング機構Bと、スロットル弁17とを具備する。制御装置は、内燃機関のアイドル運転中には実際の機関回転数と目標アイドル回転数とにズレがあるときに、このズレがなくなるように吸気弁の閉弁時期とスロットル弁開度とを補正する回転数制御を行う。回転数制御を実行するにあたり、回転数制御の実行時に吸気弁の閉弁時期が遅角側の時期にある場合には、進角側の時期にある場合に比べて、実際の機関回転数と目標アイドル回転数との同一ズレ量に対する吸気弁の閉弁時期の補正量が大きくされると共にスロットル弁開度の補正量が小さくされる。
(もっと読む)
多気筒内燃機関の気筒間空燃比ばらつき異常検出装置

【課題】異常検出のための燃料噴射量減量を行ったときの振動を許容レベル内に抑える。
【課題手段】本発明に係る多気筒内燃機関の気筒間空燃比ばらつき異常検出装置は、所定の対象気筒の燃料噴射量を減量し、少なくとも減量後の対象気筒の回転変動またはその相関値に基づき、気筒間空燃比ばらつき異常を検出する。燃料噴射量の減量時に対象気筒の点火時期を進角する。
(もっと読む)
スロットルバルブの全閉基準値設定装置及びエンジンの制御装置
【課題】運転者等に違和感を与えることの少ないスロットルバルブの全閉基準値設定装置及びエンジンの制御装置を提供する。
【解決手段】エンジン1の完爆状態前において、全閉電圧値検出部71が検出した最新の全閉電圧値TH0を、スロットルバルブ17の完爆前全閉基準値THCRK及び全閉基準値THREFとしてそれぞれ設定する第1の全閉基準値設定部72と、エンジン1の完爆状態後において、全閉電圧値検出部71が検出した最新の全閉電圧値TH0をスロットルバルブ17の完爆後全閉基準値THEXPとして設定すると共に、エンジン1が完爆状態後であることに対応したエンジン1の回転数が維持された時間に応じて、完爆後全閉基準値THEXPと第1の全閉基準値設定部72が設定した最新の完爆前全閉基準値THCRKとの何れか一方に基づいてスロットルバルブ17の全閉基準値THREFを設定する第2の全閉基準値設定部73と、を備える。
(もっと読む)
多気筒内燃機関の空燃比気筒間インバランス判定装置
【課題】空燃比センサの応答性によらず空燃比気筒間インバランス状態が発生したか否かの判定を安定して精度良く行うこと。
【解決手段】複数の気筒から延びるそれぞれの排気通路が集合する集合排気通路に配設された空燃比センサからの検出空燃比に基づくフィードバック制御により、集合排気通路内を通過する混合排ガスの空燃比が目標空燃比(理論空燃比)に一致している場合が想定される。複数の気筒において各一回の燃焼行程が終了するのに要するクランク角が経過する期間を「単位燃焼サイクル期間」としたとき、「単位燃焼サイクル期間内において目標空燃比よりリッチの値である検出空燃比の極小値が1つのみ存在する状態」又は「単位燃焼サイクル期間内において目標空燃比よりリーンの値である検出空燃比の極大値」が1つのみ存在する状態が検出されたことに基づいて、インバランス状態が発生したと判定する。
(もっと読む)
内燃機関のアイドル制御装置
【課題】内燃機関のアイドル制御装置において、氷点下となる寒冷時であって始動直後のアイドル回転数を安定化すること、回転数フィードバック制御のハンチングの発生を抑制及び早期に解消すること、回転数の変動発生によって乗員に与える不快感を低減することにある。
【解決手段】制御手段(20)は、始動時水温が予め暖機判定とは別に設けた設定値(ST2)よりも高く、且つ暖機完了判定を満たしておらず、且つ内燃機関(1)の回転数(Ne)が初期目標回転数(Ntgel)から所定量少ない判定回転数以上で、且つ発電量が所定値以上である場合が所定時間継続する際に、電気負荷に基づいて算出する目標回転数として初期目標回転数(Ntgel)を所定量ずつ増加更新して予め設定した上限目標回転数(MX)まで増加可能とする。
(もっと読む)
ガスエンジンシステム
【課題】バイオガスを燃料とするガスエンジンの空燃比の変動を抑制し、当該空燃比の変動によるエミッションの過出、熱効率等の性能低下、燃焼不良による失火・ハンチングを防止するガスエンジンシステムを提供する。
【解決手段】バイオガスのガスエンジン2と排気温度センサ24とエンジン回転数センサ26と燃料制御弁14とスロットル16とガスエンジン2の回転数を所定の回転数に制御する制御装置3とを備え、制御装置3は、エンジン負荷毎に排気温度と空燃比との関係が定められた目標排気温度マップ31を備え、エンジン回転数センサ26により検出されるエンジン負荷における目標排気温度と該目標排気温度に対応する目標空燃比を目標排気温度マップ31より取得し、排気温度センサ24により検出される排気温度が目標排気温度となり、空燃比が目標空燃比となるように燃料制御弁14とスロットル16とを制御するガスエンジンシステム1である。
(もっと読む)
車両駆動ユニットの制御装置
【課題】特定の車両制御のために振動成分を含むトルクが要求され、且つ、特定車両制御以外の車両制御のための効率要求も存在する場合に、スロットルをばたつかせることなくそれら要求に沿ったトルクと効率とを実現する。
【解決手段】振動成分を含む特定要求トルクの発生に連動して特定車両制御用のモデルトルクを生成し、特定要求トルクのモデルトルクに対する比率を特定要求効率として算出する。そして、特定要求効率にその他の要求効率を乗じて得られる値を総合要求効率として算出する。次に、特定要求トルクを総合要求効率で除算することにより得られる要求潜在トルクをその実現に必要な筒内空気量に変換し、その筒内空気量に基づいてスロットルへ向けた開度指令値を決定する。また、開度指令値に従ってスロットルを操作した場合の推定潜在トルクを算出し、推定潜在トルクに対する特定要求トルクの比率を指示効率として点火時期を決定する。
(もっと読む)
車両制御装置
【課題】勾配センサを用いずに、傾斜路における燃料カットハンチングを抑制することができる車両制御装置を提供する。
【解決手段】車両制御装置は、走行中の道路においてクルーズコントロールで要求される走行状態に自車を制御するための自車のエンジントルクTEを算出する(S109,S111)と共に、燃料カットを行わない時における前記自車の最小出力のエンジントルクTMINと、燃料カット時における前記自車のエンジントルクTFCと、を算出する(S115)。そして、TFC<TE<TMINの関係が成立する場合に(S117)、前記自車のエンジンの燃料カットを禁止する(S119)。
(もっと読む)
内燃機関の制御装置
【課題】スロットルの開度と点火時期とによってトルクを制御可能な内燃機関の制御装置に関し、トルクの制御性と燃費と補償トルクによる制振効果とをバランス良く達成可能にする。
【解決手段】要求トルクを要求効率で除算して得られる目標MBTトルクに基づいてスロットルへの開度指令値を決定する。また、指示効率に従って点火時期の遅角量を決定する。指示効率としては、要求トルクと推定MBTトルクとの比であるトルク効率と要求効率の何れか一方を選択可能とする。指示効率のデフォルトはトルク効率とし、要求効率の値が1の場合、及び、要求トルクの成分に車両の揺れを抑えるための補償トルクが含まれている場合は、指示効率を要求効率に切り替える。
(もっと読む)
システム制御装置
【課題】 動的状態が少なくとも2つの間で切り替わるシステムの制御をより良好に行うことができるもの、具体的には、ハンチングを効果的に抑制できるものを提供する。
【解決手段】 入力及び出力の時系列データから、システムを区分的アフィンシステムとして複数の動的状態の各々におけるシステムモデルを同定し、同定されたシステムモデルに基づいてシステムを制御する、システム制御装置であって、入力及び出力の時系列データを要素として含む回帰ベクトルの空間である回帰空間を動的状態の数に領域分割した場合に隣接する領域間を区分する分離超平面と、現在の回帰ベクトルとの、回帰空間中における距離に基づいて、システムの制御状態を判定する。
(もっと読む)
制御装置
【課題】内燃機関に付帯する排気ガス再循環(Exhaust Gas Recirculation)システムをスライディングモード制御するものにおいて、EGRカットの開始とともに排気管内圧力が過剰となる問題を有効に回避する。
【解決手段】状態変数を参照して線形入力及び非線形入力を反復的に演算するスライディングモードコントローラ51と、EGRガスの還流を停止するEGRカットの実行開始時に、スライディングモードコントローラ51が算出する可変ターボのノズルベーン42に与えるべき非線形入力にノズルベーン42を開く側に操作するためのオフセット量を加算した新たな非線形入力を得、その新たな非線形入力がスライディングモードコントローラ51で算出されるような状態変数を逆算して状態変数を書き換える補正制御部52とを具備する制御装置5を構成した。
(もっと読む)
制御装置
【課題】急激な外乱の発生時に引き起こされるハンチングを予防可能とする。
【解決手段】内燃機関またはこれに付帯する装置に係る制御出力を目標値r2に追従させる制御を実施するものにおいて、急激な外乱が発生する状況を察知した場合、サーボコントローラが参照する、制御対象となる制御出力の目標値r2またはその偏差をなまし処理し、目標値r2の変動に伴う制御入力の変動、換言すれば操作部の操作量を抑制するようにした。
(もっと読む)
内燃機関制御装置
【課題】電気負荷変化時における内燃機関の回転速度の変動を、より短い変動抑制時間で抑制することができる内燃機関制御装置を提案する。
【解決手段】電気負荷変化検出手段が電気負荷変化を検出した時点において、通常フィードバック制御量に基づく通常フィードバック制御が停止されるとともに、負荷変化時フィードバック制御量に吸入空気補正量が加算され、この吸入空気補正量が加算された負荷変化時フィードバック制御量に基づいて、電気負荷変化時フィードバック制御手段が内燃機関の回転速度を前記目標回転速度に制御する。
(もっと読む)
内燃機関の可変バルブタイミング制御装置
【課題】内燃機関の可変バルブタイミング装置において、保持デューティ学習値のずれがバルブタイミング制御の安定性に及ぼす影響を低減する。
【解決手段】可変バルブタイミング装置(VCT)の制御特性は、VCT応答速度が小さい低応答領域の両側にVCT応答速度が大きい高応答領域を有する非線形の制御特性であって、低応答領域に本当の保持デューティが存在する。本当の保持デューティは、カムトルクの影響で進角側の高応答領域に近いところに存在する。このため、保持デューティの学習値が少しでも進角側にずれると、オーバーシュート等が発生する可能性がある。そこで、保持デューティを低応答領域内で進角側の高応答領域から離れる方向である遅角方向に所定量オフセットさせた値を保持デューティ学習値として学習する。この際、保持デューティ学習値が低応答領域の中央付近の所定範囲内の値となるように保持制御量のオフセット量を設定する。
(もっと読む)
内燃機関の制御装置
【課題】第1、第2の気筒群に独立した吸気系を備える内燃機関において吸気調整弁の故障が検知されたとき、過剰な機関出力の発生を防止すると共に、故障した吸気系の吸気圧力が負圧になって気筒内に潤滑油が流入することを防止する内燃機関の制御装置を提供する。
【解決手段】第1、第2バンク(気筒群)の吸気路に配置されたプライマリ・スロットル弁とセカンダリ・スロットル弁を備えると共に、プライマリ・スロットル弁とセカンダリ・スロットル弁の少なくともいずれかについて故障が検知されたとき(S10,S12)、故障が検知されたバンクへの燃料供給を停止し、故障が検知されたバンクのプライマリ・スロットル弁とセカンダリ・スロットル弁の双方を全開相当開度に制御すると共に、故障が検知されないバンク側に燃料供給停止による不足分を負担させる(S18,S22)。
(もっと読む)
内燃機関の制御方法及び制御装置
【課題】EGRバルブの弁開度と可変ノズルタービンのガイドベーンの開度とを、相互に協調させて制御干渉の回避と制御性の向上を図りながら制御することができると共に、運転条件の変化に伴う非線形性に対応するフィードバックゲインを数学的な処理により求めることができて、最適サーボ制御における適合化のための工数を著しく低減できる内燃機関の制御方法及び制御装置を提供する。
【解決手段】空気流量Vと吸気圧力Pの検出値Vm、Pmを入力してEGRバルブ22の弁開度Vegrと可変ノズルタービン13aのガイドベーンの開度Vvntの制御を行う内燃機関10の制御を、2入力2出力の積分型最適サーボ系で制御すると共に、該積分型最適サーボ系の状態フィードバックゲインKF(h)と積分ゲインKI(h)を、内燃機関10の運転条件hに対応させて変化させる。
(もっと読む)
舶用エンジン制御システム
【課題】プロペラへの外乱の影響をより迅速に推定し、これに基づきガバナ制御に修正を加えて燃費の向上をする。
【解決手段】回転数指令と実測された主軸13または主機12の回転数NEの偏差をPID演算部16に入力するとともに燃料噴射装置15から主機12へ供給される燃料の量をフィードバック制御する。プロペラ14に掛かる負荷トルクを検知して、PID演算部16から燃料噴射装置15に出力されるガバナ指令に修正を加える。
(もっと読む)
エンジン回転数制御装置
【課題】外部要因で実回転数が目標回転数を強制的に上回る状態が継続した後に、外部要因が解消して実回転数が目標回転数に収束する場合には、目標回転数に対する実回転数の低下量を抑制できるエンジン回転数制御装置を提供することを課題とする。
【解決手段】アクセルレバー8と、エンジン回転数センサーと、目標回転数Nsetと実回転数Nactの偏差Nerrに基づくPI演算又はPID演算による回転数制御部100と、燃料噴射量の演算値に基づく電子ガバナ2と、を有するECU10において、目標回転数Nsetが200rpm以下であって、実回転数Nactが目標回転数Nsetよりも100rpm以上であって、燃料噴射量の演算値がそのときの実回転数NactにおけるRmin以下である場合には、Pゲインを2倍に設定し、I成分が負の値の場合には、I成分を零に設定する。
(もっと読む)
制御装置
【課題】オープン制御からスライディングモード制御へと復帰する際の制御の連続性を維持し、制御入力や制御出力のハンチングの抑止。
【解決手段】操作部に与える制御入力を任意の入力Uopに設定するオープン制御期間は、式Ueq=−(SBe)−1(SAeXe+SEeR)、Unl=−(SBe)−1{kσ(‖σ‖+η)−1}に示すスライディングモードコントローラが演算するパラメータZ及び参照するパラメータRを式Z=−S1−1S2X、R=−(SEe)−1SBe{(SBe)−1SAeXe+Uop}に示す値に置き換える。よって切換関数σ=0、非線形入力項Unl=0、線形入力項Ueq=Uopとなって、任意の入力Uopを制御入力Uとしてスライディングモードコントローラから出力させうる。故にオープン制御からスライディングモード制御へと復帰する際の制御の連続性を維持でき、制御入力や制御出力のハンチングを予防可能となる。
(もっと読む)
1 - 20 / 123
[ Back to top ]