
Fターム[3J102CA27]の内容
その他の軸受(磁気軸受、静圧軸受等) (9,013) | 目的又は効果 (1,371) | 磁気軸受固有の目的、効果(磁気軸受のみ) (138) | 制御性の向上 (46)
Fターム[3J102CA27]に分類される特許
1 - 20 / 46
磁気軸受
磁気軸受制御システムおよび磁気軸受制御方法
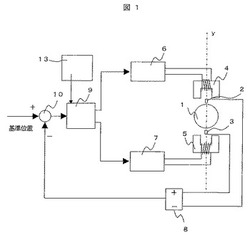
【課題】ロータの機器浮上時において、補助軸受に支えられた状態から基準位置までロータを段階的に浮上させるようにして、ロータの急激な浮上を防止した磁気軸受制御システムおよび磁気軸受制御方法を提供する。
【解決手段】ロータの上下に配置され通電によりロータを基準位置に磁気的に浮上させるコイルと、ロータの上下に配置されロータ位置を検出する位置検出器と、前記位置検出器からの信号に基いて前記各コイルに電流指令を与えるサーボ制御器を備え、前記位置検出器からのロータ位置のフィードバックにより前記コイルへの通電を制御する磁気軸受制御システムにおいて、ロータの上下に配置されロータの磁気浮上前にロータを支える補助軸受と、ロータの磁気浮上時に、前記補助軸受の間でロータを上記基準位置まで段階的に浮上させるように前記サーボ制御器を制御する制御部を設けた。
(もっと読む)
磁気軸受装置

【課題】回転体の磁気軸受装置において、その各電磁石の容量を自由に設計でき、負荷容量を過不足なく設定できる磁気軸受装置を提供する。
【解決手段】回転体の磁気軸受において、回転体の並進運動を制御する並進運動制御回路23と、該回転体の傾斜運動を制御する傾斜運動制御回路24を具備する磁気軸受制御装置において、ラジアル電位センサ部の信号を入力として、ラジアル電磁石のx、y方向の力に作用する不平衡消去回路36を並列接続した。
(もっと読む)
回転シャフトの軸方向位置検出装置とそのターボ分子ポンプ用途
【課題】線形性を向上させ、かつ製造コストを減少させた回転機械の回転シャフトの軸方向位置の検出装置を提供する。
【解決手段】回転シャフト10の端部11に設置された強磁性材料のターゲット12と、エアギャップ60を残しつつ回転機械の構造に固定され、ターゲットと対向配置された固定磁気回路32に接続された誘導コイル31と、誘導コイルに給電するための給電回路とを含む装置であり、給電回路が、誘導コイルの第1端部と基準電圧(0V)に位置する領域との間に接続されたAC電源と、誘導コイルの第1端部と第2端部との間に接続された少なくとも1つのコンデンサと、第2端部と基準電圧に位置する領域との間に挿入された検出器デバイスとを、第2端部と基準電圧に位置する領域との間を流れる電流の大きさについての情報をライン上に供給するために有し、情報は、所定の公称値e0を有するエアギャップの幅の変更値xを表す装置である。
(もっと読む)
磁気浮上制御装置
【課題】質量の大きな物体の非接触支持が可能な磁気浮上制御装置を提供する。
【解決手段】浮上体30に対向する磁極から浮上体を磁気浮上させる磁束を発生する支持力発生用永久磁石21と、支持力発生用永久磁石21の浮上体30に対向する側で、前記磁極と同一の磁極が互いに向き合い、反対の磁極が向き合わないように配置された複数の磁力制御用永久磁石13、14と、磁力制御用永久磁石13、14の向き合う磁極の間隔を、浮上体に作用する磁力を強めるときには狭くし、弱めるときには拡げるように磁力制御用永久磁石を動かすアクチュエータ15、16とを備える。磁力制御用永久磁石の間隔を狭くすると、浮上体に達する支持力発生用永久磁石の磁束が集中し、浮上体に作用する磁力が強くなる。逆に、磁力制御用永久磁石の間隔を広くすると、磁束の集中が緩和され、浮上体に作用する磁力が弱くなる。
(もっと読む)
軸受機構、電動機、圧縮機及び冷凍装置
【課題】駆動軸と円筒部材とのクリアランスを確保しつつ、磁気軸受の起動時に、駆動軸を磁気軸受の中心軸方向へ移動させる際に必要な最大電磁力を低減する。
【解決手段】水平方向に延びるように配置される駆動軸(13)を、通電時に非接触状態で回転自在に支持する磁気軸受(14)と、駆動軸(13)を囲む円筒状に形成され、磁気軸受(14)の非通電時に駆動軸(13)を内周下部で支持する円筒部材(19)と、磁気軸受(14)の通電開始時に円筒部材(19)の内周下部に支持される駆動軸(13)が、円筒部材(19)の内周面に沿って上方へ移動する旋回動作と、該旋回動作後の駆動軸(13)が磁気軸受(14)の中心軸方向へ移動する軸移動動作と、を行うように、磁気軸受(14)の電磁力を制御する制御部(20)と、を備える軸受機構を構成する。
(もっと読む)
モータ制御装置
【課題】制御遅延や電流応答遅延が発生しても遠心力低減効果が低下せず、適切な軸位置指令値を求めるのに大きな負担を必要としないモータ制御装置を提供する。
【解決手段】振れ回り抑制制御部30において、ローパスフィルタLPFによって軸変位検出値dqから軸の回転周波数に同期した直流成分の信号のみを抽出し、周期外乱オブザーバ50によって前記直流成分の信号に基づいて外乱を推定し、前記推定した外乱を抑制する軸変位指令値α*,β*を演算する。そして、前記振れ回り抑制制御部30で演算された軸変位指令値α*,β*を軸支持制御部20に入力する。
(もっと読む)
磁気浮上装置
【課題】 ゼロパワー制御により電磁石への励磁電流を常にゼロに収束させる方式において、定常的な外力に起因する浮上体の位置変動を抑制することができ、且つ動的な外力が作用した場合でも良好な追従性を得る。
【解決手段】 浮上体10と、浮上体10に永久磁石及び電磁石による磁気回路を形成する磁石ユニット23と、磁石ユニット23を固定する可動枠22と、可動枠22を支持する固定枠21と、固定枠21に対して可動枠22を支持すると共に固定枠21と可動枠22との距離を調整可能な可動枠支持機構27と、浮上体10と磁石ユニット23との相対変位を測定する第1のセンサ24と、固定枠21と可動枠22との相対変位を測定する第2のセンサ25と、第1及び第2のセンサ24,25の各出力に応じて電磁石の電流を制御することにより浮上体10を安定的に非接触支持する制御部と、を備えた。
(もっと読む)
磁気浮上装置
【課題】 変位吸収機構を有する磁気浮上装置において異なる方向から磁力を作用させる際に、装置の大型化を伴うことないく磁石ユニットおよび可動枠を構成できる磁気浮上装置を提供することにある。
【解決手段】
強磁性体を備えた浮上体2と、その外周に備えられる永久磁石および電磁石と浮上体2で磁束の磁気回路を形成する磁石ユニット11と、浮上体2に異なる方向から電磁力が作用するように複数の磁石ユニット11を固定する可動枠6、7と、可動枠6、7を、ばねを介して支持する固定枠3と、固定枠3と磁石ユニット11間の距離の調整機能を有する可動枠支持手段と、電磁石の励磁電流をゼロに収束させながら、浮上体2の磁石ユニット11からの非接触支持状態を維持する制御手段と、磁石ユニット11は、可動枠6、7の、磁石ユニット11が浮上体2の所定の軸に直行する平面上に配置されている磁気浮上装置。
(もっと読む)
磁気浮上装置
【課題】 磁気浮上装置において、磁石ユニットと浮上体間の空隙長を大きく設定でき、電力消費量を低減するとともに、様々な方向の外乱に対して浮上体の位置変動の抑制が図れる磁気浮上装置を提供することにある。
【解決手段】 電磁石と永久磁石で構成される磁石ユニット22を対向配置するように磁石取付け部28に取付け、当該磁石取付け部28をサスペンション30を介して一軸に対して可動とするとともに、制御装置46により磁石ユニット22から鉄製円環48にゼロパワー制御に基づく電磁力を作用させて、この電磁力で浮上体11を磁気浮上させることにより、外力に対する浮上体11の位置変動と非接触支持に必要な電力消費量の増加を抑制できる。
(もっと読む)
磁気軸受システム
【課題】永久磁石を応用した受動型磁気軸受があるが、特定の小型ターボ分子ポンプに限定されている。その原因は2つあり、1)被支持体(ロータ)のパラメータ(重量、重心位置、慣性モーメント、慣性モーメント比、定常回転数、構造体の共振周波数等)の変更に対して自在に対応できず、異なる被支持体に対して、個別に磁気軸受の設計が必要となる、2)ロータの振れ回り現象への減衰能を大きくすることが困難。1)と2)を解消することが、受動型磁気軸受を利用する製品を拡大する課題となる。
【解決手段】上記1)、ある基本となる磁気軸受ユニットを基準にし、それに径方向受動型磁気軸受を被支持体のパラメータの変化に応じて設定付加してゆく磁気軸受システムとする。上記2)、径方向受動型磁気軸受に受動ダンパーを付加するとともに、高真空や高温環境での応用製品に対しても使用可能な金属ファイバーを利用した受動ダンパーを付加して対応する。
(もっと読む)
ベアリングレスモータのパラメータ設定方法
【課題】ベアリングレスモータの制御において、軸支持変調式で用いるパラメータを、実際のモータの特性に応じて最適に設定する。
【解決手段】トルク電流指令値(imq*)を順次変化させていき、軸支持電流指令値(isq1*)が0のときの軸支持電流指令値(isd1*)を基に、第1の軸支持側制御系に用いる比例係数KA1,KC1を求め、軸支持電流指令値(isd1*)が0のときの軸支持電流指令値(isq1*)を基に、第1の軸支持側制御系に用いる比例係数KB1,KD1を求め、軸支持電流指令値(isq2*)が0のときの軸支持電流指令値(isd2*)を基に、第2の軸支持側制御系に用いる比例係数KA2,KC2を求め、軸支持電流指令値(isd2*)が0のときの軸支持電流指令値(isq2*)を基に、第2の軸支持側制御系に用いる比例係数KB2,KD2を求める。
(もっと読む)
磁気軸受制御装置と方法
【課題】ロータの回転周波数と異なる外力が作用する場合でも、その外力の周波数を危険速度を通過させることができ、回転同期成分以外の周波数帯域の位相を進めることができ、回転体の加減速が早い場合でもトラッキングが外れることがなく、回転同期成分を抽出するPLL(フェーズロックドループ)が不要である磁気軸受制御装置と方法を提供する。
【解決手段】ロータ11の変位x,yに基づきロータを中立位置に保持するフィードバック制御器22と、予め設定した周波数範囲(ωf±Δω)のロータの変位信号x,y又はフィードバック制御器の電流指令信号Ix,Iyのみを抽出する広帯域フィルタ24と、抽出したx軸の入力信号に所定のゲインkをかけてy軸用電磁石12yの電流指令信号Iyに重畳させ、抽出したy軸の入力信号に所定のゲインkをかけてx軸用電磁石12xの電流指令信号Ixに重畳させるクロス回路28とを備える。
(もっと読む)
磁気軸受制御装置
【課題】回路規模を大きくすることなくリップル電流の発生を抑制する。
【解決手段】
のこぎり波発生回路33,43は、互いに180度の位相差を有する同期信号S20a,S20bに同期してのこぎり波信号S33,S43をそれぞれ発生する。電流制御サブ回路61は、のこぎり波信号S33に同期しかつ、コイルL1の電流指令値It1と電流検出値Id1との差がゼロになるように、トランジスタTr1,Tr2をオン/オフ制御する。電流制御サブ回路62は、のこぎり波信号S43に同期しかつ、コイルL2の電流指令値It2と電流検出値Id2との差がゼロになるように、トランジスタTr3,Tr4をオン/オフ制御する。
(もっと読む)
制御型磁気軸受装置
【課題】 アキシアル変位センサとアキシアル磁気軸受の位置が離れていても、主軸の熱膨張によりアキシアル電磁石の制御が不安定になることがない制御型磁気軸受装置を提供する。
【解決手段】 制御型磁気軸受装置は、回転体3が制御型アキシアル磁気軸受4および制御型ラジアル磁気軸受5,6によりハウジング2内に非接触支持されて回転させられるようになされており、回転体3の一端寄りの部分のアキシアル方向の変位を検出するアキシアル変位センサ24がハウジング2に設けられ、アキシアル磁気軸受4が、回転体3の他端側のフランジ状部分16に対向するように配置されてアキシアル変位センサ24の出力に基づいて励磁電流が制御される前後1対のアキシアル電磁石17a,17bを備えているものである。1対のアキシアル電磁石が、ハウジング2に対して軸方向に移動しうるように支持されており、回転体3のフランジ状部分16の熱変位に応じて1対のアキシアル電磁石を軸方向に移動させるアクチュエータ20が設けられている。
(もっと読む)
スラスト磁気軸受装置
【課題】 電磁力の応答性を向上させることができるスラスト磁気軸受装置を提供する。
【解決手段】 回転軸2に回転軸2と同軸状に固定された回転ディスク3と、回転ディスク3の両側に回転軸2と同軸状にそれぞれ配置され、回転ディスク3との対向面に開口を有するようにして回転軸2と同軸状にリング状の溝40が設けられてなる一対のリング状の鉄心4a、4bとを有し、それぞれの鉄心4a、4bのリング状の溝40に回転軸2の軸心を周回するように巻かれてなるコイル5a、5bが収容された一対の電磁石21、22とを有し、一対の電磁石のコイル5a,5bに流れる電流を制御することにより回転軸2の軸方向の位置が調整されるように構成されたスラスト磁気軸受装置であって、鉄心4a、4bに、リング状の溝40の内面にコイルの周方向から透視してコイル5a、5bに面する部分の全長に渡るように細い溝41が設けられている。
(もっと読む)
磁気浮上型ポンプ装置
【課題】ポンプ室内のインペラの位置情報の高精度の測定およびインペラの安定した磁気浮上を実現した磁気浮上型ポンプ装置を提供する。
【解決手段】この磁気浮上型ポンプ装置1では、磁気軸受用の電磁石31に近接して配置された磁気式センサ222の出力信号に基づいて電磁石31の電流Imを制御するPID補償器224の出力の上限値をリミット回路210によって制限する。これにより、センサ出力におけるドリフトの最大値を制限することができ、インペラ23の正確な位置情報を得ることができる。
(もっと読む)
磁気軸受装置
【課題】 アキシアル方向の急激な負荷変動に対しても、磁気軸受を構成する電磁石の電磁力を追従させることができる磁気軸受装置を提供する。
【解決手段】 この磁気軸受装置は、転がり軸受15,16と磁気軸受17Aを併用し、転がり軸受15,16がラジアル負荷を支持し、磁気軸受17Aがアキシアル負荷を支持する。磁気軸受17Aを構成する電磁石17は、主軸13に設けられたスラスト板13aに非接触で対向するように、スピンドルハウジング14に取付けられる。主軸13に作用するアキシアル方向の力を検出するセンサ18の出力に応じて、コントローラ19が電磁石を制御する。このコントローラ19は、磁気軸受17Aを構成する電磁石17の発生電磁力を、前記センサ18の出力に対して非線形に制御する。
(もっと読む)
磁気軸受装置
【課題】回転体の変位を高周波数域まで精度良く検出し、高周波数域まで安定した磁気軸受制御が実現できる磁気軸受装置を提供すること。
【解決手段】電磁石2、3に発振器7で発生するキャリア周波数fcで駆動されるPWM方式のドライバ4から励磁電流を供給し、回転体1を所定の位置に回転自在に浮上支持する磁気軸受装置において、ドライバ電源5に流れる電流ieを電流検出手段19で検出し、該検出信号をバンドパスフィルタ11、復調手段12、ゲイン調整手段14を通して変位誤差信号verrを得、変位誤差信号verrを電流検出手段17、18で検出した励磁電流検出信号を加算手段8、バンドパスフィルタ9、復調手段10、ゲイン調整手段13を通して得られた変位情報信号vdispから減算手段15で減算して変位誤差信号verrを減算除去し、真の変位情報信号vdisp’を得、変位情報信号vdisp’をフィードバックする。
(もっと読む)
軸受装置およびこれを備えた遠心圧縮機
【課題】部品点数を削減して低コスト化を図ることができる軸受装置を提供する。
【解決手段】軸受装置Bは、アキシアル磁気軸受13及びラジアルフォイル軸受14と、アキシアル磁気軸受13及びラジアルフォイル軸受14によって回転可能に支持された回転軸Sと、アキシアル方向Aにおける回転軸Sの変位を検出するための磁気センサ15とを備えている。回転軸Sは、磁性材料により形成されるとともに径が異なる2つの外周面20a,20bを有し、磁気センサ15は、ラジアル方向Rにおいて、2つの外周面20a,20bに対向して配置されている。
(もっと読む)
1 - 20 / 46
[ Back to top ]