
Fターム[3J552RA04]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 伝動装置の状態 (3,968) | 過渡時 (3,341) | 変速時 (2,668) | アップシフト時 (346) | パワーオン (61)
Fターム[3J552RA04]に分類される特許
1 - 20 / 61
車両の変速制御装置
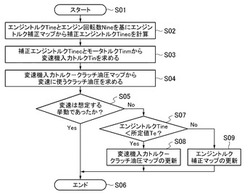
【課題】この発明は、自動変速機の変速時に発生する車両の振動等の軽減を図り、その車両の振動等の発生を軽減するための装置の演算負荷の軽減も図ることを目的とする。
【解決手段】この発明は、エンジンと、電動モータと、エンジントルク検出手段と、エンジン回転数検出手段と、モータトルク検出手段と、変速機入力トルク算出手段と、クラッチ油圧選択手段と、入力側回転数検出手段と、出力側回転数検出手段と、を備え、クラッチ油圧補正手段と、エンジントルク補正手段と、を備え、エンジントルクとモータトルクによって構成される変速機入力トルクの入力があって、自動変速機の変速時の挙動が想定する挙動でないと判断された場合に、エンジントルクが所定値未満であると判定された場合には変速機入力トルクに対するクラッチ油圧の補正を行い、エンジントルクが所定値以上であると判定された場合にはエンジントルクの補正を行うことを特徴とする。
(もっと読む)
車両制御装置

【課題】シフトアップ直前の高回転域においても加速の伸びを運転者が楽しむことができるようにする。
【解決手段】コントローラ10は、シフトアップ操作が行われたエンジン回転速度を記憶し、記憶されたエンジン回転速度からシフトアップ操作が最も行われたエンジン回転速度を検索し、同一アクセル開度で加速した場合にシフトアップ操作が最も行われた回転速度までエンジントルクがエンジン回転速度の増加に伴い増加するようにエンジントルクを調整する。
(もっと読む)
変速装置およびその制御方法
【課題】アクセルオン状態で変速段をアップシフトするに際して係合側摩擦係合要素の係合開始の遅れに起因した急係合によるショックの発生を良好に抑制する。
【解決手段】アクセルオン状態で変速段をアップシフトするに際して、クラッチC3といった係合側摩擦係合要素の油圧サーボに作動油が充填されるように油圧制御ユニットを制御するファーストフィル制御と、当該係合側摩擦の油圧サーボへの油圧が予め定められた待機圧に保持されるように油圧制御ユニットを制御する待機制御との実行後にトルクフェーズ制御を含む係合制御が実行され、直近の待機制御の後に判定基準として予め定められた閾値dNi1,ddNirefおよびdNi3に基づく度合を超える入力軸26の回転加速度dNiの変動が検出されたときにファーストフィル時間が増加側に補正される(ステップS240−S300)。
(もっと読む)
自動変速機の制御装置
【課題】ニュートラル制御からの復帰時において、ジャダーの低減と係合ショックの低減とを両立させることのできる自動変速機の制御装置を提供する。
【解決手段】第1要求エンジントルク制御手段116(SA4)によりニュートラル制御からの復帰制御において要求エンジントルクが制限され、第2要求エンジントルク制御手段118により第1制御手段による要求エンジントルクの制限が終了した後に(SA5)発進クラッチ制御手段115によるフィードバック制御が実行される(SA6)ので、第1要求エンジントルク制御手段116により要求エンジントルクが制限されたことに伴って第2要求エンジントルク制御手段118によるフィードバック制御の実行時にエンジントルクの増加代が得られ、ニュートラル制御からの復帰制御においてジャダーの低減および係合ショックの低減を両立しつつ発進クラッチの係合を行なうことができる。
(もっと読む)
自動変速機の制御装置
【課題】自動変速機においてクラッチ・クリアランスなどの部位の個体ばらつきの影響を受けることなく、摩擦係合要素の油圧の立ち上がりを管理して運転者が所望する変速フィーリングを実現する自動変速機の制御装置を提供する。
【解決手段】変速するときのトルク相の目標時間を算出し、変速先の油圧クラッチ(摩擦係合要素)の伝達トルクの初期値が算出されたトルク相の目標時間の終端時にエンジントルク相当値に到達するまでの間のトルク目標傾きを算出し、それを油圧目標傾きに変換した値から予め設定され第1、第2の特性を検索して油圧の指令値QATを算出し、それに基づいて油圧を供給する。また変速先の油圧クラッチに供給された準備圧が規定値qsに達するまでの時間を測定し(S200からS210)、測定された時間を所定値taと比較して得た結果に応じて準備圧指令値QAT0を増減する(S212からS220)。
(もっと読む)
自動変速機の摩擦係合要素の劣化診断装置
【課題】変速段が形成不能となる少し前のタイミングで劣化した摩擦係合要素を検出するなど、摩擦係合要素の所定の劣化度合いを精度良く検出することを可能とする。
【解決手段】パワーオンアップシフト時に、解放側クラッチに供給する油圧をNT吹き量に基づいて学習補正し、係合側クラッチに供給する油圧をイナーシャ相の勾配に基づいて学習補正する。係合側クラッチに供給する油圧の学習値が第2閾値X1以上であり(ST31:YES)、且つ、解放側クラッチに供給する油圧の学習値が第1閾値X2以上(ST32:YES)である場合に、係合側クラッチが劣化していると診断する(ST33)。係合側クラッチに供給する油圧の学習値が第4閾値X1未満であり(ST31:NO)、且つ、解放側クラッチに供給する油圧の学習値が第3閾値X3以上である場合に(ST34:YES)、解放側クラッチが劣化していると診断する(ST35)。
(もっと読む)
ハイブリッド自動車
【課題】変速手段のダウンシフトを行うにあたり電動機の回転軸からのトルクが駆動軸に出力されない状態とした際に、加速を要求するアクセル操作により駆動軸に作用するトルクショックを抑制する。
【解決手段】変速機61のダウンシフトを行うと判定したときに、変速機61のダウンシフトを行うためにモータ42の回転軸が駆動軸から独立して回転可能な状態になるようにし、モータ42の回転数をシフトダウン後の必要回転数に同期させる同期回転処理を実行する(時刻t2〜t3)。この同期回転処理中に加速を要求するアクセル操作がなされたときは、エンジン32のパワーの変化量の許容値である許容変化量を同期回転処理中でないときの値(第1変化量ΔP1)よりも小さい第2変化量ΔP2に設定して、エンジン32のパワーの急変を抑制する。これによりモータ42が駆動軸にトルクを出力できないときでも、駆動軸に発生するトルクショックを抑制できる。
(もっと読む)
車両の制御装置
【課題】パワーオンアップシフトのイナーシャ相終了時での機関出力トルク増大を適切なタイミングで行うことができ、その出力トルク増大による効果を最大限に得つつ自動変速機の係合要素の摩耗及び車両の加速性能の低下を抑制することのできる車両の制御装置を提供する。
【解決手段】パワーオンアップシフトでのイナーシャ相終了時、予め定められた開始タイミングをもってエンジン2の出力トルク増大を実行することにより、パワーオンアップシフトでの自動変速機3の係合要素の係合が完了するときの同自動変速機3の出力トルクの急速な落ち込み、及びそれに伴う自動車のショックの抑制が図られる。上記出力トルクの増大が行われたとき、上記開始タイミングが適正タイミングよりも早すぎることに起因する上記係合要素の係合の後退が生じている旨判断されると、次回以降の上記エンジン2の出力トルク増大の開始タイミングがより遅いタイミングに更新される。
(もっと読む)
車両用自動変速機の制御装置
【課題】一方向クラッチ係合により成立する変速段にて一方向クラッチ未同期での加速要求時、駆動力レスポンスの向上と同期ショックの低減とを両立する。
【解決手段】一方向クラッチF0未同期での加速要求時には、要求エンジントルクTEDEMを発生させるので一方向クラッチF0が同期に向かって適切に進行する。一方向クラッチF0同期の所定期間前から入力トルクTINを要求エンジントルクTEDEMの伝達に必要な必要トルク容量よりも小さな所定トルク容量にて伝達可能なトルク以下とするエンジントルクダウンを行うので、一方向クラッチF0同期時の伝達トルクはトルクダウン後の入力トルクTINまでしか立ち上がらず同期ショックが抑制される。伝達トルクの立ち上がりは入力トルクTINとトルク容量との差によるパルス的なトルク伝達とはならずステップ的なトルク伝達となるので、パルス的なトルク伝達によるショックや異音の発生が抑制される。
(もっと読む)
自動変速機の制御装置
【課題】有段変速機構を締結側と解放側との架け替えにより目標の回転数に変速制御する過程で、パワーのON/OFF状態が切り替わったとき、目標変速比と異なる変速比へと変化することで発生する変速ショックを防止する。
【解決手段】本発明は、ハイクラッチH/CとローブレーキL/Bを有し当該クラッチH/C及びブレーキL/Bの解放及び締結を組み合わせることで所望の変速段が決定される副変速機構ATと、変速機構ATを駆動させるパワーのON/OFF状態を判定するパワーON/OFF状態判定手段と、変速機構ATの変速制御と協調して目標の変速比を実現するように変速制御が行われる無段変速機構CVTとを有し、変速機構ATをパワーOFFアップシフト中のイナーシャフェーズ時に、パワーのOFF→ONがあったときは、解放側のブレーキL/Bを即時に解放させると共に、当該変速機構ATの入力トルクの変化が締結側のクラッチH/Cで抑えられるように当該クラッチH/Cを即時に締結させる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ドライバーの加速フィーリングの向上を図ると共に、車両パワーを円滑に推移させることができるハイブリッド車両の制御装置を提供すること。
【解決手段】エンジンEngとモータ(モータ/ジェネレータ)MGを有する駆動源と、モータMGと駆動輪LT,RTとの間に配置された無段変速機CVTとを駆動系に備えると共に、無段変速機CVTの変速制御を実行する変速制御手段(図5)を備えたハイブリッド車両の制御装置において、モータMG及びバッテリ9の状態から、モータアシスト可能なアシストパワー量を算出するアシストパワー量算出手段(ステップS4)を備えている。そして、変速制御手段(図5)は、無段変速機CVTの変速比をダウンシフト方向に変速する車両加速中に、この変速比をアップシフト方向に間欠的に変速する。さらに、このアップシフトに伴って生じるエンジンパワー減少量は、アシストパワー量以下にする。
(もっと読む)
動力伝達装置の制御装置
【課題】差動切換機構(切換クラッチC0、切換ブレーキB0)による差動部11の切換えと、自動変速部20の変速とが重なって実行される場合において燃費の向上させることのできる動力伝達装置10の制御装置を提供する。
【解決手段】電動機M1、M2の運転状態が制御されることにより入力軸と出力軸との差動状態を制御する差動部11と、差動部11を差動状態と差動制限状態とに切り換える切換クラッチC0、切換ブレーキB0と、差動部11から駆動輪38への動力伝達経路に動力伝達可能に連結された自動変速部20とを備える動力伝達装置10において、切換クラッチC0または切換ブレーキB0による差動部11の切換えと自動変速部20の変速とが重なって実行される場合には、変速のイナーシャ相開始前に差動部11の切換えを完了させる同時実行制御を実施する。
(もっと読む)
車両用自動変速機の制御装置
【課題】ニュートラル制御が可能な車両用自動変速機の制御装置において、ニュートラル制御からの復帰時にアクセル操作が為されるに際して、そのアクセル操作のタイミングに拘わらずショックを安定的に低減することができる車両用自動変速機の制御装置を提供する。
【解決手段】ニュートラル制御が解除されてクラッチのトルク伝達容量増加中にアクセルペダルの踏み込み操作が実施されると、クラッチの係合油圧が所定時間だけ一定油圧で保持されるため、クラッチの係合状態、自動変速機10の変速進行度をアクセルペダルの踏み込みタイミングに拘わらず一定にすることができる。したがって、アクセルペダルの踏み込みタイミングに拘わらず、同様の係合状態、変速進行度でクラッチの油圧制御を実施することができるため、ショックを安定的に低減することができる。
(もっと読む)
電動車両の制御装置
【課題】発進時のクラッチスリップ締結状態からクラッチロックアップ締結、その後のアップシフト開始までの制御時間の短縮を図ることができる電動車両の制御装置を提供すること。
【解決手段】発進時、駆動源と駆動輪(左右後輪)RL,RRとの間に介装されたクラッチ(第2クラッチ)CL2のスリップ締結状態を維持するWSC走行制御を実行する発進制御手段(図7)を備えた電動車両の制御装置において、発進制御手段は、クラッチCL2をスリップ締結からロックアップ締結へと移行させるWSCロックアップ制御部(ステップS102)と、クラッチCL2のロックアップ締結完了までの時間を予測するロックアップ完了時間予測部(ステップS103)と、予測されたクラッチCL2のロックアップ締結完了のタイミングよりも、変速機ATのアップシフトの応答時間T分早めたタイミングで変速機のアップシフト制御を開始する繰上アップシフト制御部(ステップS108,109)と、を有する。
(もっと読む)
車両の制御装置および制御方法
【課題】パワーオンダウンシフト後のアクセル開度の踏み戻しによる変速回数の増加を抑制する。
【解決手段】ECU8000は、前回の変速判断に対応する変速段が変速出力に対応する変速段よりも小さく(S102)、前回の変速判断に対応する変速段が変速線図を用いた変速判断であって(S104にてYES)、パワーオンダウンシフトに対応する変速判断であって(S106にてYES)、かつ、変速線図を用いて判断される変速段が変速出力よりも小さい場合に(S108にてYES)、変速線の読替を実施するステップ(S110)と、アップシフトを要すると判断すると(S112にてYES)、目標変速段を1段増加させるステップ(S114)とを含む、プログラムを実行する。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】電気式差動部と変速部とを備える車両用動力伝達装置において、変速部の変速中に電動機を用いたトルク相補償制御が実行される際、電動機へ供給される電力を効率よく活用する。
【解決手段】トルク補償手段88により、第1電動機M1及び第2電動機M2の内で、トルク相補償制御に必要な必要トルクΔTINを発生させる為に必要とされる電動機出力PM(必要パワーPM*)が小さい方の電動機を用いてトルク相補償制御が行われるので、第1電動機M1及び第2電動機M2の内の何れかの電動機を用いてトルク相補償制御時の必要トルク必要トルクΔTINを発生させるときに電力効率の良いトルク相補償制御を選択することができる。すなわち、電動機へ電力を供給する蓄電装置56のバッテリ効率の良い方、つまり単位時間当たりの電力の持ち出しが少ない方を選択できる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】自動変速機による変速時、モーター作動範囲が制限されるような影響を受けたとしても、目標入力回転数特性に精度良く追従するフィードバック制御を確保することで、変速ショックを抑えた変速制御を達成することができるハイブリッド車両の制御装置を提供すること。
【解決手段】エンジンEngとモータージェネレータMGを有する駆動源の下流位置に自動変速機ATを搭載し、自動変速機ATによる変速時、実入力回転数が設定された目標入力回転数特性に追従するように、モータージェネレータMGの回転数をフィードバック制御するFRハイブリッド車両の制御装置である。変速機入力回転数制御手段(図6)は、変速機入力回転数のフィードバック制御時、モータージェネレータMGのアシスト状態が力行または回生である場合、モータージェネレータMGによる力行または回生を制限すると共に、制限されたアシストトルク分を、エンジンEngからのエンジントルクにて補う。
(もっと読む)
自動変速機の学習制御装置
【課題】クラッチツークラッチ変速に際して自動変速機の入力軸トルクが変化する状況となっても、nt吹きの発生を抑制することができる学習制御を実行可能な自動変速機の学習制御装置を提供する。
【解決手段】クラッチツークラッチ変速時に変速機入力軸回転数が上昇した場合、その上昇タイミングにおいてエンジントルクの増加があったか否かを判定する。そして、変速機入力軸回転数の上昇の開始がエンジントルクの増加に起因しない場合、上記変速機入力軸回転数の上昇は、クラッチのトルク容量不足であると判断し学習制御を実行する。変速機入力軸回転数の上昇の開始がエンジントルクの増加に起因する場合には学習制御を禁止する。
(もっと読む)
ツインクラッチ式変速機の制御装置
【課題】適切なプレシフトを実行することができるツインクラッチ式変速機の制御装置を提供する。
【解決手段】ツインクラッチ式変速機14の制御装置としての電子制御装置82であり、二次元座標内に複数本の変速線が予め設定された変速線図内において車両状態を示す点Poの変化方向および変化速度を表す変化速度ベクトルを算出する変化速度ベクトル算出手段110と、算出された変化速度ベクトルと前記変速線とに基づいて次回の変速時の変速段を推定する変速段推定手段112と、推定された次回の変速時の変速段を、前記第1変速機構50および第2変速機構52のうち実際に動力伝達に関与していない側の変速機構において達成させるプレシフトを実行するプレシフト手段114とを、含むことから、プレシフトの実行の遅れが抑制されるので、適切なプレシフトを実行することができる。
(もっと読む)
自動変速機の制御装置
【課題】エンジン回転数が過剰にならないようにする。
【解決手段】マニュアルシフトモードが選択された場合、車速および加速度をパラメータとして規定された自動アップ線に従って、オートマチックトランスミッションが自動的にアップシフトするように制御される。マニュアルシフトモードが選択された場合に、アクセル開度の変化率が大きいほど、オートマチックトランスミッションがアップシフトすべき車速がより低くなるように自動アップ線が補正される。
(もっと読む)
1 - 20 / 61
[ Back to top ]