
Fターム[3J552TA06]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 制御方式 (1,028) | O/L制御,F/F制御,見込み制御 (85)
Fターム[3J552TA06]に分類される特許
1 - 20 / 85
車両用無段変速機の制御装置
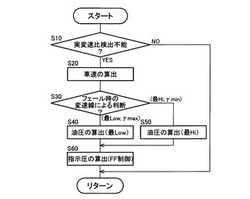
【課題】無段変速機の実変速比を検出することができないときであっても、広い車速範囲での走行性能を確保することができる車両用無段変速機の制御装置を提供する。
【解決手段】実変速比γが検出できないときには、フェール時目標変速比γ*f(目標最大変速比γmax*,目標最小変速比γmin*)を出力軸回転速度NOUTに基づいて切り替えることで有段的な変速制御が実行されるので、車両発進時に適した変速比γによる加速性能の確保と、比較的高い車速Vに適した変速比γによる走行性能の確保とを両立させることができる。
(もっと読む)
シフトバイワイヤシステム

【課題】エンコーダに異常が生じても、目標レンジと切り替え後のシフトレンジとがずれるのを抑制可能なシフトバイワイヤシステムを提供する。
【解決手段】SBW−ECU13は、エンコーダ34の異常を検出した場合、レンジセレクタ45のセレクタセンサ46から信号の出力があると、オープン駆動制御手段によりロータ37を回転駆動する。そして、SBW−ECU13は、当該回転駆動により自動変速機20のシフトレンジが目標レンジに切り替わった後、所定の期間である切替禁止時間を設定し、当該切替禁止時間が設定されている期間中、自動変速機20のシフトレンジの新たな切り替えを禁止する。
(もっと読む)
デュアルクラッチ式自動変速機
【課題】車両の減速時により低い変速段の変速する際において、良好な変速フィーリングを得ることが可能なデュアルクラッチ式自動変速機を提供する。
【解決手段】減速時クラッチ係合力抑制手段は、車両の減速中に現在の変速段より低い変速段への変速指令が発せられた場合の「係合制御」において、係合される側のクラッチのクラッチアクチュエータを制御することにより、「離脱制御」が完了した後においても、第1入力軸及び第2入力軸のうち係合される側の入力軸と駆動軸の回転が同期するまで、係合される側のクラッチの係合力を抑制した状態を維持する。
(もっと読む)
ツインクラッチ式自動変速機の制御装置
【課題】トランスミッションコントロールユニットが内燃機関制御コントロールユニットからの通信によるパラメータ情報が得られない場合にも車両の発進を可能となし、単純な二重系に依存しないフォールトトレラントな制御システムを構築することができるツインクラッチ式自動変速機の制御装置を提供すること。
【解決手段】エンジン制御コントロールユニット300からのエンジン回転速度情報が受信できない場合に、第2変速段群2に属する変速段を非作動連結状態とした上で、第2クラッチC2を締結状態として第2回転センサ28で検出した第2入力軸9の回転速度をエンジン出力軸3の回転速度に換算し、換算したエンジン出力軸3の回転速度に基づいて第1クラッチを締結するように制御することで車両の発進を可能とする。
(もっと読む)
自動変速機の制御装置
【課題】 精度の高い入力トルク情報に基づいて制御可能な自動変速機の制御装置を提供すること。
【解決手段】 自動変速機への入力トルクに関する入力トルク情報に基づいて自動変速機の制御を行う制御手段と、車両の走行状態に基づいて前記入力トルクを予測する入力トルク予測手段と、自動変速機内に設けられたトルクセンサに基づいて前記入力トルクを検出する入力トルク検出手段と、前記入力トルク予測手段により予測された入力トルク予測値と、前記入力トルク検出手段により検出された入力トルク実測値とに基づいて前記入力トルク情報を生成する入力トルク情報生成手段と、を備え、前記入力トルク情報生成手段は、所定の条件が成立した場合に、前記入力トルク予測値に基づいて前記入力トルク情報を生成し、前記入力トルク予測値の変化率が第1所定値以下、かつ、前記入力トルク実測値の変化率が前記第1所定値よりも大きい第2所定値以下である場合に前記入力トルク実測値に基づいて前記入力トルク情報を生成することとした。
(もっと読む)
車両用ベルト式無段変速機の制御装置
【課題】ベルト戻り不良が発生した状態から車両を発進させる場合であっても、ベルト滑りを発生させることなく、ベルトを最適なベルト位置に戻すことができる車両用ベルト式無段変速機の制御装置を提供する。
【解決手段】実変速比γがベルト戻し用目標変速比γt*となるように、プライマリ圧Pinおよびセカンダリ圧Poutのフィードフォワード制御およびフィードバック制御が実行されるため、実変速比γを最大変速比γmaxに変速する、すなわち伝動ベルト18のベルト位置を最大変速比γmaxに対応する位置に戻す際に、フィードバック制御が過剰に作動して、プライマリ圧Pinを抜き過ぎて伝動ベルト18のベルト滑りが発生することを防止することができる。
(もっと読む)
ベルト式無段変速機の制御装置
【課題】暖機が完了していない低温時においてもベルトの挟持力を適切に制御し、ベルトの回転抵抗の増加に伴う燃費の悪化や意図せぬ減速度の増加を防止するとともにベルトの長寿命化を図る。
【解決手段】内燃機関たるエンジンとベルト式無段変速機たるCVTとを備える車両に用いられるベルト式無段変速機の制御装置において、エンジンから出力トルクが車軸に伝達されている状態においてはエンジン又はCVTの温度が低くなるにつれてベルトの挟持力を小さく補正し、エンジンが車軸から駆動力の伝達を受けエンジンブレーキとして作用している状態においては内燃機関又はベルト式無段変速機の温度が低くなるにつれてベルトの挟持力を大きく補正するようベルト式無段変速機を制御する。
(もっと読む)
油圧制御装置
【課題】電磁弁への指示電流の折り返し位置や折り返し回数に対応するヒステリシス誤差補正を行うことで、油圧制御精度の向上を図ること。
【解決手段】油圧制御装置は、リニアソレノイドバルブ2と、ヒス油圧補正量演算手段(図3,図4)と、クラッチ圧補正制御部40と、を備えている。ヒス油圧補正量を演算するヒス油圧補正量演算手段(図3,図4)は、油圧変化特性に対するヒステリシスを表すフルヒステリシス特性を基準マップとして持ち、指示電流を油圧変化特性範囲内の途中位置で折り返すマイナーループが続いているとき、基準マップを折り返し位置に応じて縮小した縮小マップを過去から現時点までのマイナーループ毎に複数作成し、同一の指示電流位置にて複数の縮小マップにより得られる各ヒス油圧補正量の総和により、ヒス油圧補正量を演算する。
(もっと読む)
車両用ベルト式無段変速機の制御装置
【課題】実変速比が検出不可能となった場合であっても、伝動ベルトのベルト滑りを防止することができる車両用ベルト式無段変速機の制御装置を提供する。
【解決手段】入力軸32の回転速度不明時において予め設定されている変速線に基づいてプライマリプーリ42およびセカンダリプーリ46のシーブ推力(Win、Wout)がフィードフォワード制御されることで、退避走行が可能となる。このとき、プライマリプーリ42およびセカンダリプーリ46においてベルト滑りの発生しないシーブ推力が実際に確保されているか保証されないが、プライマリプーリ42およびセカンダリプーリ46のシーブ推力(Win、Wout)をそれぞれ所定量(X1、X2)だけかさ上げして制御するため、プライマリプーリ42およびセカンダリプーリ46のシーブ推力が増加し、シーブ推力にばらつきが生じてもベルト滑りを防止することができる。
(もっと読む)
無段変速機の制御装置
【課題】無段変速機が搭載された車両において、車両発進時の変速制御にオーバーシュートが発生することを抑制する。
【解決手段】車両発進時の目標入力回転数を先読みし、変速制御を早く開始させるためのフィードフォワード制御量を変速速度と変速機の入力トルクとに基づいて算出し、その算出したフィードフォワード制御量に基づいて車両発進時にフィードフォワード制御を実行することで車両発進時(変速開始時)の変速油圧を大きくする。このような制御によりフィードバック制御のみを実行する場合よりも変速開始を早くすることが可能となり、これによって車両発進時の最大変速比γmaxとしてハード的最LOWを用いている無段変速機において、車両発進時の変速制御にオーバーシュートが発生することを抑制することができる。
(もっと読む)
自動変速機の制御方法および制御装置
【課題】スリーブに押付け荷重を印加して、スリーブをリングに押付ける際、運転者に加速意志がある場合は、可能な限り短時間でスリーブを移動せしめてスリーブをリングに押付けることにより、運転者の意志に応じた変速の可能な自動変速機の制御方法および制御装置を提供することにある。
【解決手段】パワートレーン制御ユニット100は、スリーブ21,22,23を遊転ギア側へ押しつけて同期装置51,…,56の噛合いを行う際に、検出または推定した車両の前後加速度に応じて、検出または推定した車両の前後加速度が大きくなるにつれて、スリーブの移動速度を速くするように、スリーブの移動速度を調節する。
(もっと読む)
変速機の制御装置
【課題】 変速機の係合装置を作動させる油圧アクチュエータの推力および作動応答性を両立させる。
【解決手段】 油圧アクチュエータA1は、大きい第1受圧面を有する1速ピストンPS1と小さい第2受圧面を有する3速ピストンPS3とを備えており、低温時の第1モードで第1受圧面だけに油圧を作用させて油圧アクチュエータA1を右方向に駆動して1速変速段を確立し、常温時の第2モードで第1、第2受圧面の両方に油圧を作用させて油圧アクチュエータA1を右方向に駆動して1速変速段を確立し、常温時の第3モードで第2受圧面だけに油圧を作用させて油圧アクチュエータA1を左方向に駆動して3速変速段を確立する。第1モードでは油圧アクチュエータA1が大推力、低速で作動するので、作動油の粘性が高くなる低温時であっても確実な変速を可能にすることができ、第2モードでは油圧アクチュエータA1が小推力、高速で作動するので、大推力が必要とされない常温時に高い変速応答性を確保することができる。
(もっと読む)
自動変速機の制御装置
【課題】自動変速機においてクラッチ・クリアランスなどの部位の個体ばらつきの影響を受けることなく、摩擦係合要素の油圧の立ち上がりを管理して運転者が所望する変速フィーリングを実現する自動変速機の制御装置を提供する。
【解決手段】変速するときのトルク相の目標時間を算出し、変速先の油圧クラッチ(摩擦係合要素)の伝達トルクの初期値が算出されたトルク相の目標時間の終端時にエンジントルク相当値に到達するまでの間のトルク目標傾きを算出し、それを油圧目標傾きに変換した値から予め設定され第1、第2の特性を検索して油圧の指令値QATを算出し、それに基づいて油圧を供給する。また変速先の油圧クラッチに供給された準備圧が規定値qsに達するまでの時間を測定し(S200からS210)、測定された時間を所定値taと比較して得た結果に応じて準備圧指令値QAT0を増減する(S212からS220)。
(もっと読む)
前後加速度制御装置
【課題】推定勾配トルクの算出精度が低下しても、フィードフォワード制御の精度の低下を抑制できるようにする。
【解決手段】推定勾配信頼度を演算すると共に、この推定勾配信頼度に応じてフィードバックトルクを補正する。推定勾配信頼度が低ければフィードバック制御器3fのゲインが高くなるようにすることができ、推定勾配信頼度に応じた補正後フィードバックトルクを演算することができる。したがって、推定勾配トルクの信頼度が低下し、フィードフォワードトルクの精度が低下しても、推定勾配信頼度に応じてフィードバックトルクを補正することにより、フィードフォワードトルクの精度低下を補完することが可能となる。よって、推定勾配トルクの算出精度が低下しても、総合的に、フィードフォワード制御の精度の低下を抑制できる。
(もっと読む)
油圧制御装置
【課題】油圧センサの異常を検知してフィードフォワード制御に切換えた場合であっても、油圧を過剰に制御することがなく、適切な油圧を生成することができるようにする。
【解決手段】無段変速機1のセカンダリプーリ5dを動作させるセカンダリシリンダ5gに供給する実ライン圧Psを油圧センサ9にて検出し、この実ライン圧Psが目標ライン圧Psoに収束するように、リニアソレノイド弁15aをフィードバック制御するに際し、所定演算周期(ΔTsm)毎に油圧センサ9で検出した実ライン圧Psの今回の値と前回の値との差分|ΔPs|を求め(S2)、この差分|ΔPs|が設定時間(ΔTsmxno)の間、設定値Po以下の場合(S4)、フィードバック制御を停止し、設定時間ΔTst前のフィードバックゲインIfを用いてリニアソレノイド弁15aをフィードフォワード制御する(S7)。
(もっと読む)
ベルト式無段変速機の制御装置
【課題】出力軸回転速度の変動が発生したときにも、ベルト式無段変速機の入力軸回転速度の挙動を安定させることのできるベルト式無段変速機の制御装置を提供する。
【解決手段】電子制御ユニット4は、通常は、目標変速比に応じて設定される定常推力と、ベルト式無段変速機の実出力回転速度に対する目標入力軸回転速度の比の変化量に応じて設定される過渡推力との和をプライマリープーリー1のフィードフォワード指示推力に設定して変速制御を行う。一方、ベルト式無段変速機の出力軸回転速度の変動の検出時には、電子制御ユニット4は、定常推力をそのままフィードフォワード指示推力に設定して変速制御を実施する。
(もっと読む)
車両用無段変速機の制御装置
【課題】極低車速領域にあるときにプライマリプーリの作動油を抜くことにより変速比を最大変速比に保持する一方で、車速が上昇して回転数センサによって正確に回転数を検出することができるようになったときに速やかに変速比の変更を再開することのできる車両用無段変速機の制御装置を提供する。
【解決手段】電子制御装置300は目標変速比が最大変速比に設定されており且つ車速が第1基準車速未満まで低下したときに、プライマリプーリ130及びセカンダリプーリ150の回転数に基づいて算出される実際の変速比を目標変速比に一致させるようにフィードバック制御する変速制御による変速比の変更を停止し、油圧室131の作動油を抜いて変速比を最大変速比に保持する変速比保持制御を実行する。そして、車速が第2基準車速以上まで上昇したときに油圧室131に作動油を充填し、その後に車速が第1基準車速以上まで上昇したときに変速比の変更を再開する。
(もっと読む)
ベルト式無段変速機の制御装置
【課題】ベルト式無段変速機のプライマリ推力を直接的に制御することによって変速制御を行なう場合に、変速制御を精度よくかつ簡易に実現する。
【解決手段】ベルト式無段変速機の変速制御を行なうECUは、目標変速比γtをプライマリプーリの目標シーブ位置etに変換し、回転速度センサの検出値を用いて算出した実変速比γをプライマリプーリの実シーブ位置eに変換し、推力マップを参照して目標シーブ位置etと実シーブ位置eとの偏差に対応するフィードバック推力ΔWinを算出し、フィードフォワード推力Winにフィードバック推力ΔWinを加えた値を、プライマリ目標推力Wintgtとして算出し、プライマリ目標推力Wintgtに応じた指令信号をプライマリ圧力制御用リニアソレノイドに出力する。
(もっと読む)
自動変速機の制御装置
【課題】従来よりも運転者の操作に対する追従性を更に向上させることができる自動変速機の制御装置を提供する。
【解決手段】自動変速機の制御装置は、アイドルニュートラル制御を実行するクラッチ油圧制御手段1を備える。クラッチ油圧制御手段1は、アイドルニュートラル制御を解除した場合にはインギヤ制御を実行する。このインギヤ制御では、ブレーキのオフが検出されたときから又はアイドルニュートラル制御を解除したときからアクセルペダルの踏み込みが検出されるまでのアクセル検出時間TTH(STEP22)に応じて、発進段のクラッチ6aの油圧加算量ΔPTTを算出し、油圧加算量ΔPTTをクラッチ制御油圧P0に加算する(STEP26)。
(もっと読む)
レンジ表示装置
【課題】シフトレンジの表示にかかる時間のばらつきを防止して、運転者に違和感を生じさせることを防止することができるレンジ表示装置を提供する。
【解決手段】T−ECUは、シフトレバーが操作されシフトレンジの切替要求が発生したと判断した場合には(ステップS11でYes)、切替要求が発生してからの経過時間をタイマにより計測する。そして、T−ECUは、作動油温が油温T以下であると判断した場合には(ステップS12でNo)、要求シフトレンジをレンジ表示部に表示させる。そして、T−ECUは、現在レンジが確定したと判断した場合には(ステップS15でYes)、確定した現在表示をレンジ表示部に表示させ、現在レンジが所定時間t以内に確定しない場合には(ステップS16でNo)、レンジ表示部を消灯する。
(もっと読む)
1 - 20 / 85
[ Back to top ]