
Fターム[3J552TA13]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 制御方式 (1,028) | 学習制御 (312) | 学習の禁止 (34)
Fターム[3J552TA13]に分類される特許
1 - 20 / 34
車両の発進制御装置
変速制御装置および変速制御方法
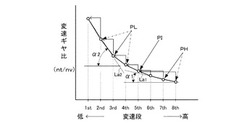
【課題】多段の変速機構における飛び越し変速を可能にしつつ、変速前後の加減速度変化を一定限度内に抑え、ドライバビリティを向上させ得る変速制御装置を提供する。
【解決手段】変速機がそれぞれ複数段の低速側および高速側の変速段と複数段の中間変速段とを形成可能な車両に搭載される変速制御装置であって、一の変速段PHから他の変速段PLへのダウンシフト方向の多段飛び越し変速が要求されたとき、一の変速段PHが特定の中間変速段PIを複数段上回ることを条件として、一の変速段PHから特定の中間変速段PIまでの飛び越し変速と、特定の中間変速段PIから他の変速段PLまでの順番変速とを含む変速制御を実行する。
(もっと読む)
油圧クラッチの初期制御値学習装置および車両

【課題】 油圧クラッチのトルク点を吸気負圧に基づいて検出して該油圧クラッチの初期制御値を学習する際に、トルク点の誤検出による誤学習を防止する。
【解決手段】 油圧クラッチ28の油圧指令値を減少あるいは増加させる過程でのエンジンの吸気負圧の変動に基づいて、油圧クラッチ28の初期制御値を学習する。仮に、油圧クラッチ28がトルク点に達したことによるエンジンEの負荷の変化をエンジン回転数により検出すると、エンジンEや動力伝達経路の慣性の影響を受けて検出精度が低下するが、エンジンEの負荷の変化を吸気負圧PBにより検出することで検出精度が向上する。学習禁止手段は2階微分値算出手段が算出した吸気負圧の2階微分値に基づいて初期制御値学習手段による学習を禁止するので、エンジン単体の負荷の変動以外の要因で吸気負圧が変動した場合に誤った学習が行われるのを未然に防止することができる。
(もっと読む)
無段変速装置
【課題】トロイダル型無段変速機の変速比制御の基準となるステッピングモータのステップ位置に関する学習値の信頼性を確保できる構造を実現する。
【解決手段】制御器により、無段変速装置を構成するケーシング内の潤滑油の温度が、ステッピングモータのステップ位置を安定して学習できる温度(設定下限温度以上且つ設定上限温度以下)であるか否かを判定する。そして、潤滑油の温度が、設定下限温度よりも低い場合又は設定上限温度よりも高い場合には、制御器による学習制御が実行される事を禁止する。これにより、得られる学習値が出力軸を停止させるのに不適正となる事を防止できて、ステップ位置に関する学習値の信頼性を確保できる。
(もっと読む)
シフトバイワイヤシステム
【課題】簡単な構成で、車両電源が瞬断しても安全に通常の制御状態に復帰可能なシフトバイワイヤシステムを提供する。
【解決手段】SBW−ECU13は、車両電源がオンしたとき、当該オンが、運転者による通常のオン操作によるものであると電源オン判別手段により判別された場合、第1位置学習手段により第1基準位置を学習する。一方、車両電源がオンしたとき、当該オンが、車両電源が瞬断した後の復帰によるものであると電源オン判別手段により判別された場合、「シフトレンジを切り替える場合は、停車し、一旦車両電源をオフした後、再度、車両電源をオンする」よう運転者に通知するとともに、アクチュエータ30を駆動しないことにより、そのときの実レンジを維持する。
(もっと読む)
制御装置
【課題】変速ショックの発生を抑制しつつ、変速段の変更の実行が必要になった場合は、回生トルクの大きさによらずに、変速装置に変速段の変更を適切に実行させる。
【解決手段】回転電機が回生トルクを出力中に変速装置の変速段を変更する判定が行われた場合に、回生トルクの絶対値が所定の変速許容しきい値以上であることを条件として変速段の変更を禁止する回生中変速禁止状態とし、回生トルクの絶対値が変速許容しきい値未満となったときに回生中変速禁止状態を解除する回生中変速禁止判定部42と、回生中変速禁止状態が所定の禁止解除判定時間以上継続した場合に、回生中変速禁止判定部42による判定結果に関わらず、回生中変速禁止状態を解除する変速禁止解除判定部43と、を備える変速装置用の制御装置31。
(もっと読む)
自動変速機の制御装置
【課題】シフトレバーがDレンジのまま停車した場合に、その後の車両の発進性を向上した自動変速機の制御装置を提供する。
【解決手段】シフトレバーがDレンジの状態で停車し、前進クラッチを解放状態にする場合に、プライマリプーリ回転数センサによってパルスを検出できない時は、前進クラッチの指示油圧の下限値を第1所定油圧に制限し(S212)、前進クラッチが解放状態から締結状態へ切り換わる油圧が第1所定油圧よりも低いと判定された場合には、前進クラッチを解放状態にする際の指示油圧の下限値を第1所定油圧よりも低い第2所定油圧に更新する(S213)。
(もっと読む)
ツインクラッチ式変速機
【課題】ツインクラッチのタッチポイントを学習により正確に把握してツインクラッチの切替時の変速ショックをなくす。
【解決手段】シンクロクラッチS1〜S4によりプリシフトした状態で第1、第2クラッチCL1,CL2を切り替えることでエンジンEからの駆動力を振り分けて駆動力を出力軸3に伝達可能な外駆動軸13、最外駆動軸15を備え、第1、第2クラッチCL1,CL2とシンクロクラッチS1〜S4を制御するマネージメントECU8を備えたツインクラッチ式変速機において、マネージメントECU8は第2クラッチCL2の容量を変化させる際のクラッチ指令値と、第2クラッチCL2が接状態となることにより動力が伝達される最外駆動軸15の回転数との関係に基づいて、第2クラッチCL2が滑り始めて接状態となるタイミングであるタッチポイントに対応した指令値を学習し、この学習した指令値を加味して第2クラッチCL2を制御する。
(もっと読む)
車両の制御装置
【課題】ライン圧不足を原因としないスリップ締結発生時にライン圧を増大補正してしまうことを防止し、燃費悪化を防ぐことができる車両の制御装置を提供すること。
【解決手段】動力伝達経路上に設けられ、ライン圧を元圧とする作動油圧を制御することで締結/解放状態が切り替わる摩擦締結要素を有する車両の運転状態に応じて、最小ライン圧設定手段を備えた車両の制御装置において、摩擦締結要素のスリップ締結状態を検出するスリップ検出手段と、摩擦締結要素のスリップ締結状態が検出されたときに、作動油圧の指示圧を学習補正してスリップ締結状態を抑制する指示圧学習補正手段と、指示圧学習補正手段による作動油圧の学習補正が収束したことを判断する指示圧学習補正収束判断手段と、摩擦締結要素のスリップ締結状態が検出されたときに、作動油圧の学習補正が収束したと判断された場合、ライン圧を学習補正するライン圧学習補正手段とを備えた。
(もっと読む)
内燃機関の燃料噴射制御装置
【課題】燃料噴射量の学習制御を行う燃料噴射制御装置に対し、この学習制御の中止に伴って発生する燃焼音の増大を軽減する。
【解決手段】自動化マニュアルトランスミッションの変速要求が発生したタイミングで、単発噴射による燃料噴射量学習制御を禁止する。これにより、変速動作に伴うトルクアップ要求よりも早いタイミングで燃料圧力の低下動作を開始させることができ、高い燃料圧力で上記学習制御が行われていた場合であっても、上記トルクアップ要求に応じた燃料噴射時にあっては、比較的低い燃料圧力での燃料噴射が可能になる。その結果、燃焼音の増大を抑えることができる。
(もっと読む)
自動変速機の制御装置
【課題】変速開始点において推定した供給圧が実際の圧力よりも低い場合は、変速開始点で検出した入力トルクと供給圧とのデータの蓄積を行わないようにして、目標供給圧の信頼性を高める。
【解決手段】供給圧推定部40は変速開始点での変速機の変速状態と目標供給圧Pcとに基づき摩擦締結要素に供給されている供給圧Piを推定する。サンプルデータ記憶部41は変速開始点での入力トルクTiと供給圧Piとを記憶し順次更新する。目標供給圧算出部44は入力トルクTiに基づいて設定した基本供給圧Poを、サンプルデータ記憶部41に記憶されている入力トルクTiと供給圧Piとに基づいて設定した補正定数ac,bcで補正して目標供給圧Pcを設定する。データ更新判定処理部42は変速開始点以降の減速比εの変化が予め設定した判定値SL1,SL2の一方を超えた場合、今回の入力トルクTiと供給圧Piの蓄積を中止する。
(もっと読む)
巻掛け伝動機構の油圧制御装置
【課題】可動シーブの油圧を封入するバルブのフェール中およびフェール解除後における変速精度の悪化を低減する巻掛け伝動装置の油圧制御装置を提供すること。
【解決手段】可動シーブ5aに給排される圧油を閉じ込める閉止弁10が固着した場合に、その時点における変速制御弁の指示流量と実流量との差を補正する学習値を保存する。この学習値を、閉止弁10の固着が解除された時点における変速制御弁の補正値に適用することによって、閉止弁10の固着解除後の変速精度を向上させることができ、燃費の悪化を低減することができる。また、閉止弁10が固着している場合であっても、学習が継続されるので、閉止弁10の固着解除処理中の変速精度の悪化を低減することができる。
(もっと読む)
自動変速機の制御装置
【課題】変速時の空吹きの発生タイミングおよびその形状に応じて適切な学習制御を実行して、変速フィーリングの悪化を防止することのできる自動変速機の制御装置を提供する。
【解決手段】複数の摩擦係合要素の係合および解放により速度比を変更して内燃機関で発生した駆動トルクを駆動輪に伝達する自動変速機5の制御装置12は、パワーオンダウンシフト開始されてイナーシャ相の終了後の2つの期間に発生する空吹き量を積算した2つの空吹き量積算値を含む空吹き情報を取得し、当該空吹き情報に応じて棚圧制御時の棚圧および緩増圧制御時の増圧率の一方を補正する。
(もっと読む)
変速機用基準位置の学習方法及び車両
【課題】変速機用基準位置の学習を簡単な処理で行うことができる変速機用基準位置の学習方法及び車両を提供する。
【解決手段】シフトレバー30に対して所定の入力動作が行われたとき、変速機12における基準位置(例えば、ギアエンド、シンクロ位置及びクラッチ締結位置)の学習を開始する。一般に、シフトレバー30は、運転者が操作し易いように配置される。このため、作業者は、基準位置の学習を簡単な処理で行うことができる。その結果、例えば、工場の制御設備や携帯型のテスタを車両10に接続してギアエンド等の学習をする場合と比べて、着脱の手間が省けるため、作業工数を削減することが可能となると共に、変速機12側に接続部を設ける必要がなくなるため、設計の自由度も向上する。
(もっと読む)
変速機用基準位置の学習方法及び車両
【課題】変速機用基準位置の学習を簡単な処理で行うことができる変速機用基準位置の学習方法及び車両を提供する。
【解決手段】シフトレバー30に対して作業者から所定の入力動作が行われたとき、変速機12における基準位置(例えば、ギアエンド、シンクロ位置及びクラッチ締結位置)の学習を開始する。一般に、シフトレバー30は、運転者が操作し易いように配置される。このため、作業者は、基準位置の学習を簡単な処理で行うことができる。また、基準位置の学習が終了したら、再度の学習を禁止する。これにより、運転に際して行われるシフトレバー30の操作を各基準位置の学習処理への移行条件として用いても、運転中に各基準位置が書き換えられるおそれがなくなる。
(もっと読む)
変速機の制御装置および制御方法
【課題】運転者によって操作されるシフトレバーのシフト方向の基準位置を示す値を、シフトセンサおよびセレクトセンサの出力値に基づいて適切に学習する。
【解決手段】HV−ECUは、今回のサイクルのセレクト方向位置SE(n)と前回のサイクルのセレクト方向位置SE(n−1)とが異なるという条件、および前回のサイクルのシフトポジションSP(n−1)がMポジションであるという条件の2つの条件が成立する場合(S202にてYES、S206にてYES)、今回のサイクルにおける基準電圧値VCの学習値を算出して記憶し(S208、S210)、2つの条件の少なくともいずれかが成立しない場合(S202にてNO、S206にてNO)、今回のサイクルにおける基準電圧値VCの学習を行なわない(S212)。
(もっと読む)
ベルト式無段変速機
【課題】追従性が高いベルト式無段変速機を提供することにある。
【解決手段】プーリ軸と、固定シーブと、可動シーブと、油圧室と、油圧室に作動油を供給、排出する作動油供給排出手段と、作動油供給排出手段と油圧室との間で作動油の流通が可能な状態と、流通が禁止された状態とを切り替える切換機構と、油圧室と作動油供給排出手段との間で流通する作動油の流量と油圧室の圧力との関係、および、異常モデルを記憶する記憶手段と、入力された変速比となるように、油圧室内の量を調整し、さらに、作動油の流量と前記油圧室の油圧との関係を更新する油圧制御手段とを有し、油圧制御手段は、変化速度が異常モデル以下で、かつ、切換機構により作動油の流通を禁止させても変速比が一定にならない場合は、作動油の流量と油圧室の油圧との関係を更新しないことで上記課題を解決する。
(もっと読む)
変速機の制御装置および制御方法
【課題】運転者によって操作されるモーメンタリ式のシフトレバーの基準位置を、シフトセンサおよびセレクトセンサの出力値に基づいて適切に学習する。
【解決手段】ECUは、セレクト電圧値VseがLoに維持される時間がT1より長く(S100にてYES)、VseがLoからHiに変化し(S102にてYES)、その後VseがHiに維持される時間がT2より長い場合に(S104にてYES)、前回のサイクルと今回のサイクルとのシフト電圧値の平均値Aを算出し(S108)、平均値Aに基づいて、シフトレバーがシフト方向の基準位置に位置するときの基準電圧値VCを学習する(S110)。ECUは、VseがLoに維持される時間がT1より短い場合(S100にてNO)あるいはVseがHiに維持される時間がT2より短い場合(S104にてYES)、基準電圧値VCの学習を行なわない(S112)。
(もっと読む)
シフト切替装置
【課題】非接触センサ(非接触NSW)の出力に基づいて検出した位置情報の補正量を学習するにあたり、何らかの異常が発生する可能性がある場合には学習を中止する。
【解決手段】特定レンジ位置(例えばPレンジ位置)において学習制御を開始する際に、現在学習値により算出するディテント回転位置θnと前回学習値にて算出したディテント回転位置θn-1との乖離量δ1が大きい場合(δ1≧判定値A1)には、何らかの異常が発生していると判断して学習を中止することで(ST4,ST8)、ディテント回転位置の誤学習を防止する。また、現在学習値により算出されるディテント回転位置θnと工場出荷時の初期ディテント回転位置θ0との乖離量δ2が大きい場合(δ2≧判定値A2)、何らかの異常が発生していると判断して学習を中止することで(ST5,ST8)、経時劣化の許容範囲外での誤った学習を防止する。
(もっと読む)
車両用自動変速機の制御装置
【課題】変速動作に際してのアキュムレータの背圧制御及びトルクアップ制御それぞれの学習における干渉を抑制してそれらの制御を好適に実行できる車両用自動変速機の制御装置を提供する。
【解決手段】第2クラッチC2、第3クラッチC3、第3ブレーキB3にそれぞれ供給される油圧を制御するためのアキュムレータ104、106、108を備え、変速動作に際してそれらアキュムレータ104、106、108の背圧を制御する背圧制御を行うと共に、エンジン12から出力されるトルクを上昇させるトルクアップ制御を行う車両用自動変速機の制御装置において、背圧制御の学習が完了しているか否かを判定し、その背圧制御の学習が完了していないと判定される場合には、トルクアップ制御を非実行として背圧制御の学習を実行するものであることから、背圧制御及びトルクアップ制御それぞれの学習の干渉を回避することができる。
(もっと読む)
1 - 20 / 34
[ Back to top ]