
Fターム[4C096DD13]の内容
磁気共鳴イメージング装置 (34,967) | 画像等の表示又は出力 (1,348) | 補助表示 (495) | マーカ表示 (197)
Fターム[4C096DD13]に分類される特許
181 - 197 / 197
医療画像表示方法及び装置
本発明は、3次元量データをディスプレイユニットにレンダリングするステップと、画素を選択するステップと、前記画素に対応するボリュームエレメントの基準面からの符号付距離を決定するステップと、前記距離に基づいてシンボルのサイズをスケーリングするステップと、選択された画素又はその近傍にあるスケーリングされたシンボルを、表示し又はプリントするステップとを具えることを特徴とする医療画像表示方法に関する。  (もっと読む)
(もっと読む)
診断支援装置、診断支援方法およびそのプログラム

【課題】 撮影した画像に現れた異常陰影などの注目する箇所をシェーマ図上に正確にかつ簡単にマークする。
【解決手段】 被写体を撮影して得た胸部画像から被写体の肋骨形状を推定し、胸部画像上の位置を指定して入力後、指定位置と推定された被写体の肋骨形状と対比することによって、指定位置を前記肋骨形状からの相対的な位置で表した相対位置情報を求める。シェーマ図の肋骨形状と相対位置情報とからシェーマ図上に指定位置に対応する位置を表示する。
(もっと読む)
画像出力システム

【課題】合成画像の再生が容易となるように記録媒体への出力を行う。
【解決手段】制御装置20では、制御部により患者が撮影された各撮影画像を用いて合成画像を生成し、当該合成画像とともに、合成画像をフィルムに分割して出力する分割領域を示し、当該分割領域より大きい出力範囲が定められている出力枠を表示部により表示させる。操作部によりフィルムへの出力指示操作がなされると、合成画像からその出力枠に定められた出力範囲内の画像を抽出する。そして、出力条件等を指示する出力制御情報を生成し、抽出した画像上に分割領域の境界を示す指標としてカットラインのマーカ画像を合成し、これを出力画像として出力制御情報とともに通信部24によりフィルム出力装置40に送信させ、フィルム出力装置40によりフィルム出力を行わせる。
(もっと読む)
医用撮影用マーカー
【課題】医用撮影機器で患者を撮影する場合に、患者の特定の部位を正確に撮影画像に反映させ、撮影された患者の画像の特定部位と、実体である患者におけるその位置との対応付けを極めて正確に行うのに役立つ医用撮影用マーカーが望まれる。
【解決手段】球形をし、予め定める第1の材質で形成され、互いに所定の間隔をあけて配置された3つの球体からなる内層51,52,53を有する。3つの球体51,52,53は、その材質とは異なる第2の材質で形成された外層54で取り囲まれている。外層54の表面には、3つの球体51,52,53の各中心点にそれぞれ対応した3つの位置情報表記61,62,63が記載されている。
(もっと読む)
核磁気共鳴撮像装置
【課題】手術ナビゲーションシステムやISC機能などの手術支援機能を操作性よく実行でき、記憶装置の容量の増大を防止できるMRI装置を提供する。
【解決手段】被検体を撮像するMR撮像部と、ポインタ27で指示した被検体の所望の位置を検出する位置検出デバイス9と、MR画像及び他の撮像装置からの画像や映像を取り込み格納する映像記録部34と、位置検出デバイス9が検出した所定の位置の位置情報を、MR撮像部における撮像断面の位置情報に変換する計算部19と、計算部19からの情報にMR撮像部及び映像記録部を制御する制御部23と、画像を表示する表示部とを備え、制御部23は、ポインタ27が位置検出デバイスの検出圏内か否かをトリガーとして各ソフトの動作及び各種映像の取り込みの開始・中断を制御する。
(もっと読む)
磁気共鳴画像診断装置における使用に適合し、及び/又は放射線撮像処理における使用に適する無線信号送信器を有する埋込可能マーカー
患者内のターゲットの位置を発見するための無線(例えば、リード線なし)マーカー。一実施形態では、マーカーは、ケーシング、共鳴回路、及び強磁性要素を含む。強磁性要素は、マーカーが1.5Tの場の強度と3T/mの勾配とを有する撮像磁場内にある時に、撮像磁場によってマーカーに掛けられた力がマーカーに掛かる重力よりも大きくないような容積を有することができる。代替的な実施形態では、強磁性要素は、このような容積を有する必要はないが、マーカーは、ケーシング及び/又は磁気トランスポンダ(例えば、共鳴回路)と共に組み込まれた撮像要素を更に含む。撮像要素は、マーカーがトランスポンダの磁気重心と少なくともほぼ一致する放射線撮影重心を有するような放射線撮影画像における放射線撮影プロフィールを生成する。  (もっと読む)
(もっと読む)
医用画像処理システム、医用画像処理プログラムおよび医用画像処理方法
【課題】より適切に三次元画像等の画像を表示させることにより、ユーザがより容易に曲断面を設定するとともに設定した曲断面の位置や形状を把握することが可能な医用画像処理システム、医用画像処理プログラムおよび医用画像処理方法である。
【解決手段】医用画像処理システムは、画像診断装置において収集された医用画像データを保存する医用画像データベース4と、医用画像データベース4に保存された医用画像データから作成された三次元画像データに基づいて、指定された曲線に沿う曲断面画像を作成するために、視線方向を変更することが可能な三次元画像を参照画像とする操作画面を表示させるための操作画面情報を作成する操作画面情報作成手段7bと、入力手段5から受けた情報と三次元画像データとに基づいて曲断面画像の位置を参照画像上に帯状に表示させるとともに曲断面画像を操作画面に表示させるための曲断面画像データを作成する曲断面画像生成手段7cとを有する。
(もっと読む)
超音波治療装置
【課題】 核医学診断装置とX線CT装置等とを組み合わせて、機能画像と形態画像とを作成し、患部(腫瘍)の状態をその場で判断することが可能な超音波治療装置を提供することを目的とする。
【解決手段】 被検体から放出されたγ線は、放射線検出器21B〜21Dによって検出される。超音波治療装置4によって遮蔽された領域Aには配置されている放射線検出器21Aは音響媒体42によってγ線が減衰されるため、γ線を検出しない。核医学診断装置2がPET装置の場合、放射線検出器21B〜21Dによって検出されたγ線の検出信号は、同時計数法によって処理された後、再構成処理される。核医学診断装置2がSPECT装置の場合は、同時計数法なしにそのまま再構成処理される。これらの信号を再構成することによって機能画像データを生成し、X線CT装置によって生成された形態画像と合成して表示する。
(もっと読む)
医用画像表示装置
【課題】 管腔臓器の観察対象となる領域を効率的に抽出、表示ができる。
【解決手段】 医用断層画像撮影装置により撮影された医用断層画像を表示するディスプレイ19と、該表示された医用断層画像を参照して、観察対象となる管腔臓器領域を抽出するための領域の開 始点を設定するマウス16と、を備え、CPU10は、該設定された開始点から所定の抽出アルゴリズムにより前記管腔臓器領域を抽出し、該抽出された管腔臓器領域の分岐部を検出し、該検出された分 岐部の分岐方向のうち一方向を選択し、該選択された方向の管腔臓器を前記所定の抽出アルゴリズムにより再抽出し、該再抽出された管腔臓器と前記医用断層画像を前記表示手段に表示制御する。
(もっと読む)
自動化された疑わしいオブジェクト境界判定のためのシステム及び方法
本発明は、機械学習システム(300)及び遺伝的アルゴリズムを使用する自動化された疑わしいオブジェクト境界判定のためのシステム及び方法を提供する。この機械学習システム(300)は、予め分類された実例のセットを使用して、トレーニングされ(204)、テストされる(205)。遺伝的アルゴリズムは、初期パラメータ値を割り当て(201)、テスティング時にこのシステムのパフォーマンスを評価し(206)、パフォーマンスレイティングを割り当て(207)、続いて、このレイティングが許容可能である場合、その時点の機械学習システムの設定が、将来の疑わしいオブジェクトセグメンテーションのためのデフォルトパラメータとして割り当てられる(209)。但し、パフォーマンスレイティングが許容不可能である場合、遺伝的アルゴリズムは、その設定を調整し(210)、新たに調整される設定を使用してこのシステムを再トレーニングする。  (もっと読む)
(もっと読む)
手術支援システム
【課題】手術支援システムにおいて、簡易な制御処理で画像診断機器座標系とマニピュレータ座標系との統合を可能にして、システムの簡略化を図りつつ使い勝手の向上を図ること。
【解決手段】手術支援システム1は、対象部位を含む体腔内の対象領域を撮像する画像診断機器101と、画像診断機器101で撮像した画像を画面に表示する画像表示装置113と、体腔内の対象部位の処置を行うマニピュレータ102と、画像表示装置113に表示する画像を制御する制御部131と、画像診断機器101の撮像領域内に位置し且つマニピュレータ102の固定側に位置する部分に立体的に設置した少なくとも3点のマーカとを備える。制御部131は、マーカの位置をマニピュレータ座標系で計算し、画像診断機器で撮像したマーカの位置を画像診断機器座標系として取得し、マーカの位置に基づいて2つの座標系の変換を行うものである。
(もっと読む)
画像処理装置とこれを用いた手術支援システム
【課題】操作者の作業量と操作者の主観判断への依存を極力減らし,断層画像から線状組織と塊状組織を分類する手術支援システムを提供する。
【解決手段】断層画像データ上に領域分割したい組織臓器に属する点を1点以上教示点として付与させる。線状組織と塊状組織で異なる情報を教示点に付与することで,組織臓器の解剖的特長に適した処理が可能になる。線状組織の領域分割を塊状組織の領域分割に先行して行うことで,後者の検出の精度を高める。線状組織の領域分割では,付与された教示点間の接続関係に基づき,教示点間を接続する組織の軸線と太さを決定して,各線状組織に属する領域を決定する。塊状組織の領域分割では,容易に分割可能な外包領域と内部領域への分類の後に,未分類の点を既分類の区分に帰属させる演算を繰り返し,未分類の点がなくなるまで反復する。
(もっと読む)
取得パラメータ最適化のための一体化されたプランスキャン画像化
本発明は、人体の低解像度の全身プランスキャン画像を使用する磁気共鳴画像化システムを提供する。全身プランスキャン画像を利用して、人体の関心領域の高解像度かつ高品質な画像を取得するための取得パラメータの最適化に必要な、人体に関する複数の個別情報を集める。さらに、オペレータによる関心領域の決定と選択を容易にするために、全身プランスキャン画像を使用する。また、MRIは、患者の特定の人体部分または器官を自律的に識別する効果的手段を提供する。全身プランスキャン画像から得られる全情報をオペレータに提供するので、オペレータのワークフローを直感的に有効に簡略化する。好ましくは、低解像度全身プランスキャン画像を取得する際に、最終的な高解像度画像を取得するための必要な較正パラメータを求める。  (もっと読む)
(もっと読む)
インターベンションデバイスの空間的ロードマップ生成方法、システム、及びその空間的精度を監視する品質管理システム
本発明は、インターベンションデバイスの空間的ロードマップ生成方法、システム、及びその空間的精度を監視する品質管理システムに関する。本発明を実施するシステム100の一実施形態では、X線画像化器100aを用いて、カテーテル182a、182bを含む検査対象のボリュームを示す好適な画像Di+1、Di、...、DNを取得する。これらのX線画像は、次に、それ自体既知の再構成方法により処理され、動き補正された3次元検査ボリュームを生成する。このボリュームは、次に、ディスプレイ部183上の好適なユーザインターフェイスにより、検出可能マーカを備えたカテーテル182a、182bの遠位部とともに表示される(簡単のため、1カテーテルにつき1つの検出可能マーカのみを示した)。対象臓器184の動き補正した3次元画像を用いて、動き補正された対象臓器指向3次元座標系を構成する。この座標系は、空間的ロードマップ183を描くために用いられ、さらに別の検出可能マーカ185′を有する置換可能カテーテルの空間的位置を位置決めするために用いられる。これらの計算は計算手段160を用いて実行する。計算手段160は、可視化された空間的ロードマップ183と置換可能カテーテル185の位置の間の空間的食い違いの計算を含むさらなる計算を実行するように構成されている。大幅な不一致が通知され、カテーテルが制御可能ナビゲーションシステム190により対象臓器内に位置づけられている場合、計算手段は、ナビゲーションシステム190に適用すべき制御信号Sを計算し、空間的ロードマップ183と置換可能カテーテル185の位置との間の不一致を補正する。制御部は、次に、ナビゲーションシステム190に補正信号Sを送る。インターベンションプロシージャが続く。
 (もっと読む)
(もっと読む)
治療支援用画像処理装置
治療の目標となる治療範囲を予め設定しておいて、治療中に既に治療が完了したと考えられる既治療領域の画像を取得し、この既治療領域に基づいて目的治療領域全体の治療が終了するまでの時間を推定する。また、治療中の部位の変化を色で表現させて表示する。また、複数の治療時間について治療の完了したイメージをシミュレートすることでよりわかりやすく治療が終了するまでの時間を決定する。以上の特徴により、治療精度を向上させ、治療に要する総時間や被曝の低減を図ることができる。 (もっと読む)
解剖学的なターゲットの場所を特定するための磁気共鳴画像の使用
放射線治療を計画するためにMR画像を使用する新しいMR方法及びシステムが記述されている。画像は、磁気中心(アイソセンタ)を有する磁界を生成するスキャナによって得られる。まず、少なくとも1つの基準のマーカ(4;5)が、アイソセンタから予め決められた距離離れた患者の身体(1)に適用される。患者は、解剖学的なターゲット(2)が前記アイソセンタの近くに位置するように、前記スキャナの範囲内で配置しなおされる。前記ターゲット(2)の第1の画像が得られ、そののち、患者(1)は、基準マーカ(4;5)がアイソセンタの近くにくるようにシフトされる。第2の画像が、基準マーカが前記第1の画像にマージされる正確な幾何学的位置を有するシフトされた位置において得られる。  (もっと読む)
(もっと読む)
手術用ナビゲーションシステム(カメラプローブ)
【課題】手術部位内のナビゲーションのシステム及び方法を提供する。
【解決手段】本発明に係わる実施形態では、トラッキング装置でトラックされる、携帯のナビゲーションのプローブに、マイクロカメラを設けている。これにより、プローブ内に設けたマイクロカメラの視点からのリアルタイム画像を見ながら、手術場面内でナビゲーションが可能となる。手術場面には、術前の走査から生成された対象構造のコンピュータ3次元画像が、重ね合わされている。カメラ画像および重ね合わせ3次元画像の透明性の調整で、深さの認識を強めることができる。プローブ先端と重ね合わせの3次元構造との距離、すなわちプローブから延びた仮想の放射線に沿った距離が、組合せた画像に動的に表示される。本発明の実施形態では、仮想インターフェイスが、組合された画像に隣接してシステムの表示装置に表示される。これによりナビゲーションに関わる機能が促進される。 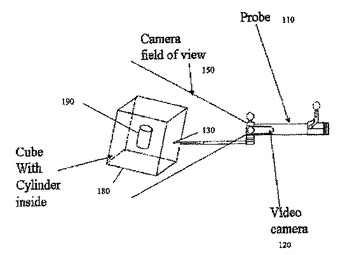 (もっと読む)
(もっと読む)
181 - 197 / 197
[ Back to top ]