
Fターム[4C097TA05]の内容
補綴 (46,288) | 義肢・身体装着伸長具 (315) | 下肢;人工脚の構造 (160)
Fターム[4C097TA05]の下位に属するFターム
Fターム[4C097TA05]に分類される特許
21 - 31 / 31
人工股関節

本発明は、取付手段に取り付けるためのおよび義足のための接続手段(21,31)を有する人工股関節(1)に関する。更に、股関節での伸展運動および歩幅を制御するための制御ユニット(6)が設けられている。制御ユニットによって、立脚相での伸展運動および義足の歩幅を、例えば液圧式の制御装置によって制御することが可能である。 (もっと読む)
力伝達部材

【課題】高い剛性を損なわずに軽量化を推進し得る力伝達部材を提供する。
【解決手段】下肢の運動に補助力又は抵抗力を与えるべく関節の側方に装着された力発生装置(回転アクチュエータ4)の力を脚部(大腿部T)に伝達するための力伝達部材(トルク伝達アーム6)を、脚部の側面、前面、および後面に対向する部分を一体形成し、特に、脚部の側面に対向する部分(メインアーム部6b)から前後に斜めに枝分かれさせた部分(ブランチ部6c)に、脚部の前面に対向する部分並びに脚部の後面に対向する部分を一体形成し、且つ脚部の前面に対向する部分および脚部の後面に対向する部分の各先端部に、脚部に当接するプレート7の結合部をそれぞれ設けるものとする。
(もっと読む)
モジュール化された義足カバー
【課題】 短時間で外装でき、膝の屈伸に悪影響を与えず、膝の破れなどの問題もない義足カバーを提供する。
【解決手段】 義足カバーを、大腿ソケットに取り付けられる大腿モジュール10と、下腿パイプ6に取り付けられる下腿モジュール30と、下腿モジュール30に揺動可能に支持される膝蓋骨モジュール20とにモジュール化する。これらの上を伸縮性繊維素材で作った皮膚モジュールで覆う。また、各モジュールの構成要素をできる限り既製品化する。
(もっと読む)
セラミック製造
セラミック体の製造方法であって、セラミック(520/521)の初期未加工体を用意し、該未加工体を機械加工して機械加工未加工セラミック体(530)を得る。機械加工未加工セラミック体を燃焼してより完成したセラミック体(540)を得ておよび/またはさらに処理して最終完成セラミック体(550)を得る。セラミック体は後部安定化膝内植組織のための大腿骨部材(100)、または膝人工器官を有する人工回転装置のための部材体(101)であってもよい。ジルコニアセラミック体が有利に製造される。  (もっと読む)
(もっと読む)
外科手術の際に骨の支持に使用するための支持構造
外科手術の際に骨(11)を支持するのに使用するための支持構造である。この構造は、ガイド手段(19)によって配置される1つ又はそれより多くの支持体(1)を含み、各支持体は手術の際に骨周りに嵌ってこれを支持するための手段(6、7)を含む。 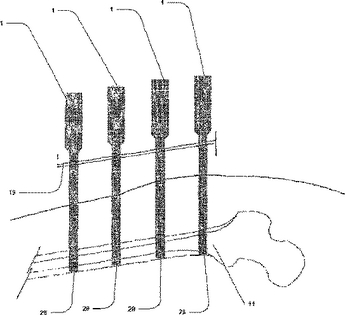 (もっと読む)
(もっと読む)
3次元形状の計測装置およびその計測データによる義肢のソケット形状設計装置
【課題】
超音波により、人体の外部形状だけでなく骨,筋肉,脂肪形状等内部組織形状も併せて計測し,さらに、義肢使用時において断端部周辺に作用する荷重を考慮して、義肢使用者が快適に使用できるようなソケットを提供するための3次元形状測定装置、義肢用ソケット形状設計装置などを提供することである。
【解決手段】
本発明は、超音波の送出手段と、前記超音波の反射波の検出手段と、前記超音波の送出手段と前記反射波の検出手段の位置を決定する手段と、複数の材質から構成された検体の異なる材質間の境界を求めるために、検出されたデータを解析する手段と、解析された結果から有限要素モデルを作成する手段とを備えた3次元形状計測装置である。また、そのデータを使って義肢用ソケットを設計するための義肢用ソケット形状設計装置である。
(もっと読む)
補装具
人体の切断部を収容するシェル構造と、シェル構造を義肢(16)に接続するフレーム機構(13)とを有する補装具(10,20,31)であって、上記のシェル構造は、互いに向かい合い切断部を収容する収容空間を形成する少なくとも2つのシェル部(11,12; 21, 22; 32)を有し、上記の少なくとも2つのシェル部は、フレーム機構を介して互いに接続され且つ互いの相対的な配置を変更出来るように構成され、上記のシェル構造は、複数の粒子(46)を内包し排気可能なライナ(46)を部分的に有するとともに、シェル部の相対的に固定する締付け機構(25,51)を備えるように構成する。 (もっと読む)
歩行装置
【課題】二足歩行用ロボットに使用される歩行装置であって、大きな負荷に耐え得るだけでなく安定した歩行動作を達成し得るように構成され、しかも設計上の自由度に優れた歩行装置を提供する。
【解決手段】歩行装置は足部10と、腰部12と、該足部及び腰部の間に設けられた脚部14とを具備する。脚部14は下腿部リンク機構16と、この下腿部リンク機構16に膝関節手段22A、22B、22C、22Dを介して接続された大腿部リンク機構18とから構成され、下腿部リンク機構18は足首関節手段20A、20B、20Cを介して足部に連結され、大腿部リンク機構18が股関節手段24A、24B、24Cを介して腰部12に連結される。腰部12には直線駆動手段26A、26Bと、回転駆動手段28が保持され、この駆動手段が足部を上下方向、前後方向及び左右方向のそれぞれに選択的に駆動させるべく大腿部側駆動リンク部材に組み込まれる。
(もっと読む)
機能調整式義足
義足(124)は足竜骨(165)および前記足竜骨に連結された腓脛部を含み、義足の足関節部を形成する。装置(125)は前記腓脛部の上端と前記義足の下部の間に連結され、前記義足の使用時に前記腓脛部の上端の後ろへの動きに力を補填し、前記腓脛部の上記上端の前への動きを制御するために使われる。前期装置(125)は歩行中の前記腓脛部の前記上端の前への動きに伴う力が負荷されたときエネルギーを蓄え、力から解放されたとき蓄えたエネルギーを戻して、運動力として歩行中に義足が発生した使用者の体への推進力が加えられるばねを有する。 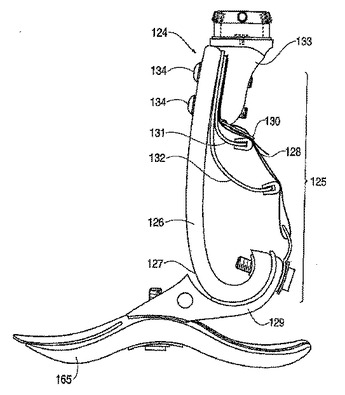 (もっと読む)
(もっと読む)
義肢用装着器具
本発明は、義肢を患者の骨に装着するための器具(1)を提供するものである。本器具は、骨インプラントに取り付けられる近接部コンポーネント(2)と、義肢に取り付けられる末梢部コンポーネント(3)と、近接部及び末梢部コンポーネント(2,3)を連結し、使用において、曲げ力及び/又はねじれ力が義肢のみに適用され、その力が閾値レベルを超えたとき、装着器具(1)内で可動結合することにより、その力が調節される連結部材(4,5)と、を備える。そのため、本器具(1)は患者の骨を保護する安全可動結合装置として機能する。 (もっと読む)
脚付きロボット用の流体移動によるバランスシステム
本発明は、動いている間または任意の仕事を遂行している間にバランスが失われることを防止し、同様に二つ以上の脚部を有するロボットが重み運搬する際の、脚付きロボット向けのバランスシステムに関する。本発明により開発される、二脚ロボットまたは多脚ロボット向けのバランスシステムは、基本要素としてのバランス流体ポンプ(2)、バランス流体タンク(5)、バランス流体移動管(6)、およびバランス流体(7)によって特徴付けられている。ロボットのバランスは、タンク(5)間でバランス流体(7)を移動させることによって供される。 (もっと読む)
21 - 31 / 31
[ Back to top ]