
Fターム[4C097TA09]の内容
補綴 (46,288) | 義肢・身体装着伸長具 (315) | 下肢;人工脚の構造 (160) | 股関節の構造 (15)
Fターム[4C097TA09]に分類される特許
1 - 15 / 15
歩行支援装置
【課題】二重関節において歩行アシストに適するように変動過度特性を動的に調整する。
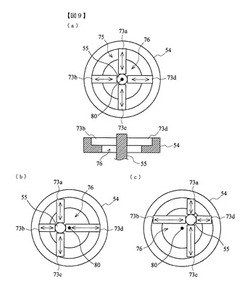
【解決手段】歯車54は、中央にザグリ部75を有する貫通孔76が形成されている。ザグリ部75の内周側には、伸縮する偏心アクチュエータ73a〜73dが十字状に設置されている。偏心アクチュエータ73b、73dは、固定軸55の両側に対向して配置されており、端部は、固定軸55の両側を挟持している。偏心アクチュエータ73a、73cは、偏心アクチュエータ73b、73dの軸線に対して垂直な方向において、固定軸55の両側に対向して配置されており、端部は、固定軸55の両側を挟持している。偏心アクチュエータ73a〜73dを駆動して歯車54の回転軸を中心点80から貫通孔76内の任意の点に偏心させる。
(もっと読む)
装着式動作補助装置

【課題】本発明は両腕で運搬物を抱えながら安定的に移動できることを課題とする。
【解決手段】動作補助装置10は、装着者12の上肢に装着される上肢フレーム14と、装着者12の下肢に装着される下肢フレーム19と、装着者12の腰に装着される腰フレーム30と有する。上肢フレーム14は、腰フレーム30の上方に形成され、腰フレーム30の前側より上方に延在する垂直フレーム15と、垂直フレーム15の上端より肩幅方向に横架された肩フレーム16A、16Bとを有する。肩フレーム16A、16Bには、運搬物を持ち上げる際に両腕の動作をアシストする上肢駆動部17A,17Bが前後方向に回動可能に設けられている。従って、肩フレーム16A、16Bに支持される上肢駆動部17A,17Bの質量は、上肢フレーム14に支持されるため、装着者12には上肢フレーム14及び上肢駆動部17A,17Bの重さを感じることなく、作業が行える。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】歩行面の種類に応じた歩行支援を行う。
【解決手段】装着型ロボット1は、装着者が歩行のために関節モーメントを発生させる際に、各アシストアクチュエータを駆動して装着者が発生させる関節モーメントを軽減する。装着型ロボット1は、各関節の角度を計算することができ、これら関節の角度とつま先や踵の接地の有無から、装着者が歩行する歩行面の種類を判定する。装着型ロボット1は、判定した歩行面の種類に応じて各アシストアクチュエータの力を調節することにより、平地を歩行しているのと同程度の力加減で階段や坂道を上り下りできるようにする。このように、装着型ロボット1は、各歩行シーンを判定し、歩行シーンに応じたアシスト力を与えることで歩行シーンの違いで人が出力する力を意識することなく歩けるようにする。
(もっと読む)
患者特異的な寛骨臼カップ配置用ガイド
患者の寛骨臼の選択表面と位置が合う少なくとも1つの表面を有する患者特異的テンプレート;ならびに術前に計画された方向、または位置および方向に従って、寛骨臼カップの方向、または位置および方向を提供するガイド部を具備する、寛骨臼カップ置換手術の際に術中使用するための、術前に設計されるガイダンスツールが提供される。ガイダンスツールは、患者の解剖学的構造の選択表面と位置が合う少なくとも1つの係合表面を含みかつガイド部と協動する検証ツールをさらに具備していてもよく、患者の解剖学的構造上に検証ツールを正しく位置決めすることにより、患者の寛骨臼内の患者特異的テンプレートの方向が正しいことが確認される。寛骨臼カップ置換手術の方法、ならびに、術前に計画された寛骨臼カップの方向、または位置および方向を寛骨臼カップ置換手術の際に患者に移すための方法についても、本明細書において説明する。 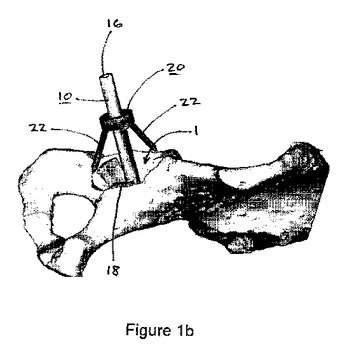 (もっと読む)
(もっと読む)
骨空洞のための支持構造体インプラント
骨空洞内部に位置し、その空洞を画定する骨を支持する、支持構造体インプラントは、構造体の第1の端部から反対側の第2の端部に向けて延びる、組み合わせたワイヤから形成される。構造体は、第1の端部から、第1の端部と第2の端部との間の幅広地点における最大横寸法まで、外側に広がり、第2の端部における一定断面の首部分まで、幅広地点と第2の端部との間で内側にテーパー状になる。構造体は、首部分にワイヤを保持するリングクランプを第2の端部に含み、リングクランプは内側支持リングを含む。(a)内側支持リングと、テーパー部分と首部分との間の界面との間の距離の、(b)首部分の直径に対する割合は、約1.0以下である。 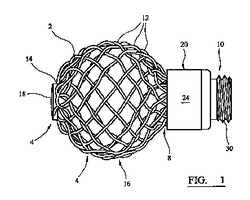 (もっと読む)
(もっと読む)
股関節骨折の防止装置及び方法
股関節骨折の防止装置は、第1端部と第2端部とを有するシャフトと、第1端部で大腿骨頭に係合する伸展手段とを有する。シャフトは大腿骨の所定深さの穴に位置される。この穴は大転子から大腿骨頭まで伸びていて、第1端部が大腿骨頭内に、第2端部が大転子に位置される。この装置は大腿骨骨幹軸の長軸に対してほぼ垂直に位置される。  (もっと読む)
(もっと読む)
アシスト装置及びその制御方法
【課題】装着者の利便性が向上するアシスト装置及びその制御方法を提供すること。
【解決手段】アシスト装置は、人体の関節に直接連結された第1身体部位10と、当該関節に直接連結され、第1身体部位10より先端側にある第2身体部位20とに装着されるものである。アシスト装置は、第1身体部位10に装着され、姿勢に応じたアシスト力が生じる第1装着部10と、第2身体部位20に装着され、第1装着部10と非連結であり、第1装着部10に生じるアシスト力とは独立して、姿勢に応じたアシスト力が生じる第2装着部20とを有するものである。
(もっと読む)
股関節及び膝関節自動股義足
【課題】
健常側の歩様情報に基づき義足に内蔵した制御装置・駆動機構が、義足股関節と膝関節を能動的に駆動させ、装着者が安定歩行できる股下離断者と健常者が装着可能な関節自動駆動式股義足の提供。
【解決手段】
本発明は、骨盤と大腿部を支持する股ソケット2と、肩掛ストラップ(8,9)と、股ソケット2の外周側面に取り付けた義足大腿部21を駆動源22で股関節軸27周りに揺動させる股関節駆動機構19と、義足大腿部21下部に取り付けた下腿パイプ38を駆動源34で膝関節軸31周りに揺動させる膝関節駆動機構30を備え、股関節及び膝関節制御機構40が、角度計測器(42,43)による歩行時の健常側大腿部と下腿部の角速度値と、感圧スイッチ(44〜49)による両脚足裏の離着床検知結果を制御コンピュータ41で解析して義足の振り出しを制御する。
(もっと読む)
人工股関節用複合材製ソケットおよびその製造法
【課題】ソケット内ライナ部の薄肉化を可及的に可能にして球状ヘッドの大径化によりソケットの被り量を減らし、インピンジメントの発生を抑えて関節動作範囲を健常時並に近づけられるようにする人工股関節用複合材製ソケットを提供する。
【解決手段】寛骨臼に嵌着固定される臼蓋カップ部10とその内面に設けられて球状ヘッド9と摺接するライナ部11とを、炭素繊維強化PEEK樹脂で一体的にした臼蓋ソケット2のかたちで成形する。臼蓋カップ部10は、炭素繊維織り布で補強されたPEEK樹脂製球殻層で形成され、ライナ部11は、炭素短繊維に炭素系ナノファイバまたはナノチューブを添加したPEEK樹脂製高耐磨耗層で形成される。これよって、臼蓋ソケット2の薄肉化を可及的に図って球状ヘッドの大径化を実現する。
(もっと読む)
歩行補助具
【課題】小型かつ軽量であり、装着部の動作を制限せず自由な動作を可能とする歩行補助具を提供する。
【解決手段】股関節近傍を支持する股関節支持部材1と、膝関節近傍を支持する膝支持部材2と、足を支持する足支持部材3と、股関節支持部材1と膝支持部材2とを接続する複数のリンク4aからなる第1リンクユニットと、膝支持部材2と足支持部材3とを接続する複数のリンク4bからなる第2リンクユニットとを備え、各リンク4aは股関節支持部材1に一端が、膝支持部材2に他端が回動自在に取り付けられ、各リンク4bは、膝支持部材2に一端が、足支持部材3に他端が回動自在に取り付けられ、各リンク4a・4bは、股関節支持部材1、膝支持部材2および足支持部材3を接続する方向に伸縮自在に構成される。
(もっと読む)
股ソケットの側面に股関節の回転中心を備えた股義足
【課題】義足装着者の義足装着後の歩様を、健常な脚の歩様に出来るだけ近いなめらかなものとし、併せて義足装着者の体力的な負担を軽減すると共に着座の妨げにならない股継手を備えた股義足の技術を提供する。
【解決手段】骨盤に固定する股ソケット100の外周下面に露出するガイドレール102を取り付け、股ソケット100の外周側面に股関節軸124を設け、股関節軸124を中心に上端を回転可能に取り付けた回転ブラケット122の下端に股ソケット100の下方に回りこむ下端支持部122bを形成し、支持部122b上には、ガイドレール102の露出面と接触し、かつ前記露出面に沿って転がりつつ股ソケット100を支持する支持ローラー127を設け、支持部122bの下には、大腿用骨格パイプ150を取り付けた股義足とした。
(もっと読む)
補綴装置ならびに補綴装置を埋め込むためのシステムおよび方法
本発明は、関節の少なくとも一部を形成するように構成された補綴装置(5)を埋め込む方法を提供する。該方法には、体に埋め込まれるように構成された補綴装置の第一の構成要素(10)を選択する段階、第一の構成要素が体の骨に対して固定される配置を決定する段階、体に埋め込まれるように構成された補綴装置の第二の構成要素(12)を選択する段階、および第二の構成要素が骨に対して固定される配置を決定する段階が含まれる。第二の構成要素の配置の決定は、第一の構成要素への接続に拘束されない。
 (もっと読む)
(もっと読む)
旋回伸縮リンク機構と同旋回伸縮リンク機構を用いた股義足及び大腿義足
【課題】補償動作を伴う義足の問題点を解決するのに適した平面リンク機構であるのと同時に、義足以外にも応用可能な旋回伸縮リンク機構と、同旋回伸縮リンク機構を用いた股義足及び大腿義足とを提供する。
【解決手段】一対の支持リンク2・3を固定リンク9に第一のピンaにより交差した状態で結合し、一対の同一長さの支持リンク2・3間に、同一長さの四本のリンク4・5・6・7をピンb・c・d・eで結合し閉環状にした平行四節リンク8を配置して、その対角線上の一組の第二・第三のピンc・eにそれぞれ一対の支持リンク2・3の一方を回転自在に連結する。そして、固定リンク9に連結リンク10を第四のピンfによって結合し、この連結リンク10を平行四節リンク8のもう一方の対角線上に位置する一組の第五・第六のピンb・dのうち、第一のピンaに近い方に位置する第五のピンbに回転自在に連結する。
(もっと読む)
外科手術の際に骨の支持に使用するための支持構造
外科手術の際に骨(11)を支持するのに使用するための支持構造である。この構造は、ガイド手段(19)によって配置される1つ又はそれより多くの支持体(1)を含み、各支持体は手術の際に骨周りに嵌ってこれを支持するための手段(6、7)を含む。 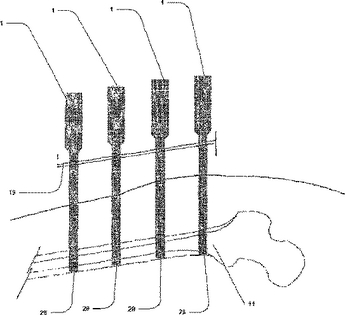 (もっと読む)
(もっと読む)
大腿部に差し込まれるシャフトを備えた人工股関節
大腿部内に差し込まれるべき、また、その表面が骨誘導性をもつ仕上がりを有するシャフト(3)を備えた人工股関節。この仕上がりは、シャフト(3)の骨幹端部分(5)に排他的に、また、シャフト断面の最大前後寸法のライン(7)から側方に設けられる。これにより、人工股関節における追加の手術を実行するため能力を確保しつつ、力の流れにおける骨幹端の海綿骨のより良好な関わり合いが保証される。  (もっと読む)
(もっと読む)
1 - 15 / 15
[ Back to top ]