
Fターム[4C097TB04]の内容
補綴 (46,288) | 義肢の動作;調節;操作 (438) | 調節機構 (94) | 折曲げ解除;施錠 (55)
Fターム[4C097TB04]の下位に属するFターム
折曲げ角度調節 (43)
Fターム[4C097TB04]に分類される特許
1 - 12 / 12
歩行支援装置、及び歩行支援プログラム
【課題】装着者の筋力に応じた歩行支援を行う。
【解決手段】装着型ロボット1(図1)は、超音波センサ35によって装着者の大腿部の筋厚と皮脂厚を測定し、これによって装着者の骨格筋率(体組成情報)を推定する。装着型ロボット1は、予め様々な被験者の骨格筋率の平均値を記憶しており、装着者の骨格筋率が平均値よりも小さい場合は、アシスト力を強めに調節し、平均値よりも大きい場合はアシスト力を弱めに調節する。即ち、装着型ロボット1は、装着者の骨格筋率によって装着者の脚部の筋力を推定し、筋力が弱い場合にはアシスト力を強めに設定し、筋力が強い場合はアシスト力を弱めに設定する。このように、装着型ロボット1は、装着者の脚部の筋力の個人差に応じて自動的にアシスト力を調節するため、装着者は、筋力の個人差によらずに快適な歩行支援を受けることができる。
(もっと読む)
義指装置

【課題】 物品を確実に把持することが可能な義指装置を安価に提供する。
【解決手段】 指骨格12を第1アクチュエータ71で屈曲・伸長し、指骨格12を覆う袋体52〜55内部に粉体を充填し、指骨格12の屈曲後に袋体52〜55の内部を第2アクチュエータ73で真空引きして固化するので、袋体52〜55が固化していない状態で指骨格12を屈曲させて義指を物品の表面に当接させ、柔軟な袋体52〜55の形状を物品の形状に沿うように馴染ませた後に袋体52〜55を固化することで、特別に強い把持力を必要とせずに物品を確実に把持することができる。しかも第1アクチュエータ71は指骨格を屈曲・伸長させることが可能であれば、センサ等を用いて義指の把持力や屈曲量を制御する等の複雑な制御を行う必要はなく、また第2アクチュエータ72は袋体52〜55の内部を真空引できるものであれば良いため、極めて低価格で実現することができる。
(もっと読む)
装着型動作支援装置
【課題】関節の遠位身体部位の動作を規制しないようにする。
【解決手段】関節の遠位身体部位に装着される第2サポート部材は、第1サポート部材に連結されるアウター部材80と、アウター部材80に対して回転変位可能に配設されて該遠位身体部位に装着されるインナー部材81とを備える。インナー部材81は、開閉可能に連結された第1インナー半体105および第2インナー半体106からなり、開放させて遠位身体部位にセットし、閉成して該遠位身体部位に装着される。従って、遠位身体部位に回転を伴う捻り動作をすると、アウター部材80に対してインナー部材81が回転変位するので、該遠位身体部位の捻り動作をスムーズに行ない得る。
(もっと読む)
筋力補助装置
【課題】人体を圧迫することを防ぐとともに、人工筋の駆動力を伸展のトルクに効率的に変換することができる筋力補助装置を提供すること。
【解決手段】本発明の筋力補助装置は、人工筋80として、第1の装着具10の反関節側に一端81Aを設けた第1の人工筋80Aと、第2の装着具20の反関節側に一端81Bを設けた第2の人工筋80Bとを用い、第1の人工筋80Aの他端82Aと第2の人工筋80Bの他端82Bとをリンク部材90を介して連結し、第1の人工筋80Aの他端82Aをリンク部材90に回動及び摺動可能に設け、第2の人工筋80Bの他端82Bをリンク部材90に回動可能に設けたことを特徴とする。
(もっと読む)
筋力補助装置
【課題】屈曲動作と伸展動作とを行わせるためにエアシリンダーを用いるとともに、このエアシリンダーを固定した状態で回転運動を得ることができる筋力補助装置を提供すること。
【解決手段】本発明の筋力補助装置は、関節の一方の骨に沿って配置される第1の装着具10と、関節の他方の骨に沿って配置される第2の装着具20と、第1の装着具10と第2の装着具20とを連結する弾性関節又は多軸関節とを備え、使用者の肘、膝、又は手首の動作を支援し、第1の装着具10に一端を、第2の装着具20に他端を設けて直進運動を回転運動に変換するリンク機構40を有し、リンク機構40の直進運動として直動駆動部を用いることを特徴とする。
(もっと読む)
リンク機構、姿勢保持装置、機器の姿勢保持装置
【課題】人体以外の動力源を用いることなく、筋力をそれほど使わなくとも一定の姿勢を保持可能で、広範囲での作業が可能、且つ、安価なリンク機構、当該リンク機構を用いた姿勢保持装置を提供する。
【解決手段】一対のリンク105,109が関節機構によって連結されているリンク機構であって、関節機構は、受動体及び回転体が対向配置され所定トルクより大きいときに相対的回転を許容し小さいときに相対的回転を阻止する摩擦制動機構107と、可動部と可動部に対して一方向への回転を許容し他方向への回転を阻止する基部からなる一方向回転機構104と、回転体と基部を同一軸心上に配置して固定する固定部と、受動体及び回転体を軸心方向に沿って所定の締付力で挟持する締付機構を備えて構成され、第一リンクの一端部が受動体と連結され、第二リンクの一端部が可動部と連結されている。
(もっと読む)
充電可能な電気エネルギー貯蔵装置を備えたプロテーゼ
本発明は、電気エネルギー・アキュムレータ(12)を備えたプロテーゼに係る。このプロテーゼは、(a)誘導コイル(28)と;(b)誘導コイル(28)の中で誘導された電流に基づいてエネルギー・アキュムレータ(12)を充電するための充電用の接続部(24)と;を有していて、この接続部は、誘導コイル(28)及びエネルギー・アキュムレータ(12)に電気的に接続されている。 (もっと読む)
人工股関節
本発明は、取付手段に取り付けるためのおよび義足のための接続手段(21,31)を有する人工股関節(1)に関する。更に、股関節での伸展運動および歩幅を制御するための制御ユニット(6)が設けられている。制御ユニットによって、立脚相での伸展運動および義足の歩幅を、例えば液圧式の制御装置によって制御することが可能である。 (もっと読む)
4軸補装具関節
【課題】
本発明による4軸補装具関節は、下肢能力を失った歩行者ができるだけ自然に歩行できるようにする。
【解決手段】
本発明は、4軸補装具関節に関する。本発明の4軸補装具関節は、上部支持部110が上段に固定される上部固定片120と、下部支持部130が下段に固定される下部固定片140と、一側端は前記上部固定片120の前半部に、他側端は前記下部固定片140の前半部に各々回動可能に設けられる前方回転レバー150と、一側端は前記上部固定片120の後半部に、他側端は前記下部固定片140の後半部に各々回動可能に設けられて、前記前方回転レバー150に対して相対的に長さが短く、前記上部固定片120と下部固定片140が一定の軌跡を描いて上下および前後方向への回転を可能にする後方回転レバー160と、前記上部固定片と下部固定片の相対回転を弾性的にガイドする弾性ガイド手段を含んで構成されることを特徴とする。
(もっと読む)
眼内レンズの流通コンテナ
本発明は、眼内レンズをレンズ保持部に配置しやすく、かつ安定して保持できる眼内レンズの流通コンテナを提供することを目的とする。
本発明は、ベース、キャップ、及びベース上に配置される一対のレンズ把持部を有するレンズ保持部を備えた流通コンテナであって、前記一対のレンズ把持部が眼内レンズを把持可能な間隔だけ離間せしめる離間部を介して互いに対向するように配置され、前記キャップの内面から内方に保持安定係合部が突設され、当該保持安定係合部の先端が面取りされることによって導入部を画定し、前記レンズ把持部間に眼内レンズが配置され、前記キャップがベースに取り付けられるときに、前記導入部が前記レンズ保持部に接触して前記離間部の間隔が狭められ、レンズ把持部間に配置された眼内レンズが、圧迫されることも脱落することもなく保持できることを特徴としている。  (もっと読む)
(もっと読む)
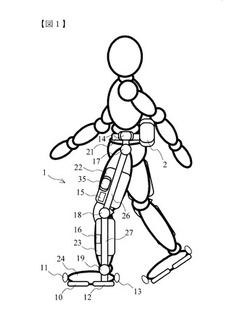
歩行装置
【課題】二足歩行用ロボットに使用される歩行装置であって、大きな負荷に耐え得るだけでなく安定した歩行動作を達成し得るように構成され、しかも設計上の自由度に優れた歩行装置を提供する。
【解決手段】歩行装置は足部10と、腰部12と、該足部及び腰部の間に設けられた脚部14とを具備する。脚部14は下腿部リンク機構16と、この下腿部リンク機構16に膝関節手段22A、22B、22C、22Dを介して接続された大腿部リンク機構18とから構成され、下腿部リンク機構18は足首関節手段20A、20B、20Cを介して足部に連結され、大腿部リンク機構18が股関節手段24A、24B、24Cを介して腰部12に連結される。腰部12には直線駆動手段26A、26Bと、回転駆動手段28が保持され、この駆動手段が足部を上下方向、前後方向及び左右方向のそれぞれに選択的に駆動させるべく大腿部側駆動リンク部材に組み込まれる。
(もっと読む)
義肢の膝関節
【課題】本発明の課題は、容易に立ち上がりかつイスに安全確実に座ることができる、義肢の膝関節を提供することである。
【解決手段】この課題は、関節手段が、屈曲の際に、限定可能な角度範囲の内で、屈曲に抗して抵抗し、かつ常に自由に伸展されることができる抵抗手段を有することによって、解決される。
(もっと読む)
1 - 12 / 12
[ Back to top ]