
Fターム[5B057BA15]の内容
Fターム[5B057BA15]に分類される特許
161 - 180 / 344
三角法を用いた物体の光学的測定方法
本発明は、三角法を用いて光学記録装置(1)によって物体を測定する方法に関する。第1のシャッター手段(3.1)によって第1のパターン(11.1)が生成され、記録対象物体(8)に第1の投影ビーム(7.1)として投影される。少なくとも1つの別のシャッター手段(3.1〜3.4)によって別のパターン(11.2〜11.4)が生成され、記録対象物体(8)に別の投影ビーム(7.2〜7.4)として投影される。第1のパターン(11.1)と別のパターン(11.2〜11.4)は物体(8)から観察ビーム(13.1〜13.4)として反射され、物体の3Dデータセット(21)を得るために少なくとも1つの記録手段(6、6.1、6.2)によって記録される。投影された第1のパts−ン(11.1)と別のパターン(11.2〜11.4)は少なくとも1回の三角法記録(20、53、54)で少なくとも1つの記録手段(6、6.1、6.2)を用いて同時に記録される。
 (もっと読む)
(もっと読む)
物体検出装置
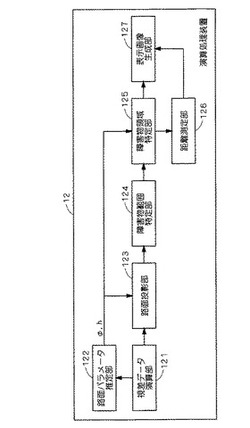
【課題】平面上にある特定の物体を検出することができる物体検出装置を提供する。
【解決手段】演算処理装置12は、視差データ演算部121、路面パラメータ推定部122、路面投影部123、障害物範囲特定部124、障害物領域特定部125、距離測定部126及び表示画像生成部127を備える。障害物の検出にあたっては、まず、ステレオカメラ11から演算処理装置12へ2次元ステレオ画像を入力する。続いて、視差データ演算部121が、計測点Pにおける視差を演算し、路面パラメータ推定部122が路面パラメータである高さh及び傾きφを推定する。さらに続いて、路面投影部123が、基準画像上で計測点Pを路面に投影し、障害物範囲特定部124が障害物範囲を特定し、障害物領域特定部125が障害物領域を特定する。そして、障害物距離測定部126が、障害物までの距離を測定する。
(もっと読む)
画像処理装置および画像処理プログラム

【課題】時系列画像の中から異常部を含む画像を検出する際に行う処理を必要最低限に抑え、異常部を含む画像を短時間で検出すること。
【解決手段】優先順位設定部753は、時系列で前の生体内画像に対して行った異常部検出処理の結果をもとに各単位区画に優先順位を設定する。異常部検出部755は、優先順位設定部753によって設定された優先順位に従って各単位区画を順次処理対象とし、異常部検出処理を行う。異常部検出処理停止制御部757は、異常部検出処理の結果をもとに、異常部検出部755による異常部検出処理を停止するか否かを判定する。そして、異常部検出処理停止制御部757が異常部検出処理を停止すると判定した場合には、異常部検出部755が、その処理単位区画を異常部検出位置として記録する。
(もっと読む)
動物体検出装置及び動物体検出方法
【課題】移動体からの広視野角画像から動物体を精度良く検出可能な動物体検出装置を提供する。
【解決手段】第1及び第2の時刻において移動体からの広視野角画像を取得する撮像装置10と、第1及び第2の時刻のそれぞれの広視野角画像から半径方向エッジをそれぞれ獲得するエッジ獲得部101と、第1及び第2の時刻のそれぞれの半径方向エッジの大きさを度数としてエッジ度数分布をそれぞれ作成する度数分布作成部102と、第1及び第2の時刻のそれぞれのエッジ度数分布中に含まれる連続する複数のヒストグラムビンを同一のクラスとしてそれぞれクラスタリングするクラスタリング部104と、第1及び第2の時刻間のクラスの移動量を推定する移動量推定部105と、移動量に基づき動物体候補を検出する候補検出部106と、動物体候補から動物体を検出する動物体検出部107とを備える。
(もっと読む)
画像処理装置および画像処理方法
【課題】光源を変動させるような大規模なシステムを必要とせず、スナップショットを撮影するように撮影された画像から陰領域と影領域とを抽出することができる画像処理装置等を提供する。
【解決手段】被写体の画像における陰影に関する処理を行う画像処理装置100であって、被写体からの光の輝度に関する情報である輝度情報及び被写体からの光の偏光に関する情報である偏光情報を含む被写体画像に関する情報を取得する画像情報取得部110と、画像情報取得部110で取得された輝度情報及び偏光情報に基づいて、光の当たり方によって被写体の表面に生じる陰領域、及び、被写体によって光が遮断されたことによって他の物体上に生じる影領域を、被写体画像から抽出する陰影領域抽出部120と、陰影領域抽出部120で抽出された陰領域及び影領域を特定する情報を出力する出力部130とを備える。
(もっと読む)
紙表面検出装置及び画像形成装置
【課題】 従来、光の入射方向によっては、同じ紙表面が違う画像として捉えられてしまい、読取対象に関する情報を正確に読み取ることできなかったという課題を解決することを目的とする。
【解決手段】 紙15の表面に斜め方向より光を照射する発光素子11と、その照射領域内を映像として読取るエリアセンサ13とを備え、読取結果から紙15に関する情報を読取る映像読取装置において、発光素子11を、紙15の搬送方向に対し斜めの方向より照射するよう所定の角度をもって配置した。
(もっと読む)
一体型の物体取り込みシステム及び表示装置並びに関連方法
表示装置の近くの物体を取り込み測定するための、一体型の物体取り込みシステム及び表示装置並びに関連方法を提供する。物体取り込みシステムは、構造化光パターンを物体の表面上に投影するための少なくとも1つの投影装置と、物体の表面上に作用する構造化光パターンの少なくとも1つの画像を取り込むための少なくとも1つの検出装置と、取り込んだ画像に関する測定を求めるためのコンピューティング装置とを含むことが可能である。表示装置は、物体に対する位置を提供して物体取り込みシステムに関して仮定することが可能である。物体取り込みシステムは、表示装置と一体化されても、その装置に取り付けられても、又はそうではなくその装置と並んで位置決めされてもよい。測定は絶えず処理可能であり、表示装置、表示装置に接続されたコンピュータ、又は表示装置に接続された任意の装置の使用のレベルを求めることが可能である。  (もっと読む)
(もっと読む)
車両周辺監視システム
【課題】夜間に撮影した近赤外線映像の細部の認識度を向上させること。
【解決手段】近赤外線光源の発光状態、可視光カメラの撮影タイミングおよび近赤外線カメラの撮影タイミングを制御することで、近赤外線光源から近赤外線を被写体へ照射しない状態で被写体から反射された可視光を可視光カメラによって第一画像を撮影させた後に近赤外線光源から近赤外線を被写体へ照射する状態で被写体から反射された近赤外線を近赤外線カメラによって第二画像を撮影させる処理を所定間隔で繰り返し実行する。さらに、第一画像から被写体の輪郭を抽出し、その抽出した輪郭および輪郭に囲まれた部分からなる特定領域を第二画像に合成し、その合成後の画像における特定領域に特定の色彩を付与する。なお、色を付けると、照明や信号機などの判別が可能となる。
(もっと読む)
映像歪曲補正方法及びその補正方法を採用した映像処理装置
【課題】従来のレンズ歪曲補正方法の欠点を克服して外側部での映像品質の劣化を最小化することができる映像歪曲補正方法及びその方法を採用した映像処理装置が提供される。
【解決手段】方法は、広角レンズから映像を受像すること、広角レンズにより発生される映像における歪曲の歪曲係数を抽出すること、抽出された歪曲係数を利用して映像の歪曲を補正すること、及び、補正された映像を表示することを含む。装置は、映像を受像する広角レンズ100と、広角レンズにより映像において発生される歪曲の歪曲係数を抽出する歪曲係数抽出部220、及び抽出された歪曲係数を利用して映像の歪曲を補正する歪曲補正部240を備えた映像処理部200と、補正された映像を表示するディスプレイ部300と、を備える。
(もっと読む)
画像読み取り装置、識別情報取得装置、複写システム
【課題】広い領域を符号画像等の読み取り対象領域とする。
【解決手段】スキャナ装置は、原稿を走査して原稿上の可視画像を読み取るCCDイメージセンサと、固定配置されて原稿上の不可視画像を読み取る赤外受光部112を備える。赤外受光部112は、直方体状の筐体113と、筐体113の内側底部に固定される赤外エリアセンサ114と、赤外エリアセンサ114の上部に固定されるレンズ部115(第1レンズ115a〜第4レンズ115d)と、開口部116aを有しレンズ部115の上部に回転可能な状態で取り付けられるシャッタ部116とを備える。そして、シャッタ部116を回転させて開口部116aの停止位置を変えることで、赤外エリアセンサ114による原稿の赤外撮像領域を変更する。
(もっと読む)
立体画像生成装置およびプログラム
【課題】 観察し易い印刷用の立体画像を生成することができる立体画像生成装置およびプログラムを提供する。
【解決手段】 背景画像の各部位の奥行き情報を記憶する奥行き情報記憶手段54と、背景画像への合成対象画像の配置位置の入力を受け付ける配置位置入力受付処理手段32と、受け付けた配置位置に対応する背景画像の部位についての奥行き情報を奥行き情報記憶手段54から抽出する奥行き情報抽出処理手段37と、抽出した奥行き情報に対応する合成対象画像の眼数を眼数テーブル記憶手段55に記憶された眼数テーブルから取得して決定する眼数決定処理手段39と、決定した眼数の合成対象画像を背景画像に合成して印刷用の立体画像を生成する合成処理手段41とを設け、立体画像生成装置10を構成した。
(もっと読む)
復元処理を前提としたレンズの評価方法および装置、評価用補正光学系
【課題】復元処理を前提としたレンズの評価方法および装置において、収差付加タイプの復元処理を前提としたレンズに対しても、通常の結像光学系と同様に汎用的な手法を用いて、光学系のみの性能評価を可能にする。
【解決手段】光学像を電子画像に変換した後、鮮明な画像を得るように復元処理を行う画像形成システムにおいて用いられる、この復元処理を前提とする設計に基づいて実際に製作された、復元処理を前提としたレンズの評価装置である。この評価装置10は、設計の通りのレンズと組み合わせることにより鮮明な光学像を形成する評価用補正光学系2と、評価用補正光学系2と製作されたレンズ(被検レンズ3)とを組み合わせた合成光学系4の光学特性を測定する測定手段5と、測定の結果に基づき、製作されたレンズを評価する評価手段6と、を含む。
(もっと読む)
三次元形状計測装置、三次元形状計測方法、三次元形状計測プログラム、および記録媒体
【課題】迅速かつ高精度に三次元形状情報を計測できる三次形状元計測装置を実現する。
【解決手段】位置に応じて周期的に輝度が変化する光パタンを、計測対象12が計測される搬送ステージ52上の一部の領域へ投影する投光部20と、光パタン照射領域14を撮像する第1のラインセンサ36と、光パタン非照射領域16を撮像する第2のラインセンサ38と、第1のラインセンサ36が撮像した画像82および第2のラインセンサ38が撮像した画像84から、背景情報を除去した画像86に含まれるある画素における光パタンの位相を、画像86における画素とその周辺の画素との輝度値に基づいて算出し、算出した位相に基づいて計測対象12の高さ情報を算出する画像解析・駆動制御部40とを備え、第1のラインセンサ36および第2のラインセンサ38は、それぞれ、光パタン照射領域14および光パタン非照射領域16を、同時に撮像できるように配置されている。
(もっと読む)
立体撮像装置および立体撮像装置の制御方法並びにプログラム
【課題】隠れ点を考慮して簡易に精度良くマッピング画像を取得できるようにする。
【解決手段】同期制御部20により距離画像を取得するための撮像部2Aおよび撮像部2Bの駆動を同期させて距離画像および2次元画像を取得する。対応関係算出部30により、距離画像上における画素と、2次元画像上における画素との対応関係を算出する。この際、隠れ点検出部31において、撮像部2Aからは臨むことができるが撮像部2Bからは臨むことができない被写体上の隠れ点を距離画像および2次元画像上において検出する。マッピング部32により、対応関係に基づいて、隠れ点を視認可能に2次元画像を距離画像にマッピングしてマッピング画像を生成する。
(もっと読む)
画像処理装置、プロジェクタ
【課題】多軸の回転角度を用いて投写面に表示された画像の歪みを補正するプロジェクタにおける歪み補正の精度向上。
【解決手段】角度パラメータの補正時に、角度パラメータθ、φをまず補正し、その後に補正角度ψを入力する。こうすれば、補正角度ψを、光軸を回転軸とするプロジェクタの横転角度ψ0ではなく、スクリーン法線を回転軸とする回転角ψ1に変換して扱うことができる。従って、角度パラメータθ、φを補正してスクリーンSCに画像を表示すべき表示領域の形状を略矩形とした後に、角度パラメータψを入力して、スクリーン法線を回転軸として表示領域を回転させて、投写面の水平垂直方向に対する表示領域の歪み(傾き)を補正できる。よって、略矩形とされた表示領域について新たな台形歪みの発生を抑制でき、効率的に表示領域の歪みを補正できる。
(もっと読む)
生体特徴入力システム、画像合成装置、画像合成方法および、画像合成プログラム
【課題】 撮像手段によって直接撮像された画像と鏡やプリズム等を用いて鏡像反転して撮像された画像をつなぎ合わせた画像を合成することを可能とするための技術を提供する。
【解決手段】 本発明の一例の画像合成装置は、互いに分離された第1画像と第2画像の両画像を同一面に含む第3画像を入力して、第1画像を鏡面反転して第2画像とつなぎ合わせをして第4画像を合成する。
(もっと読む)
三次元座標測定装置及び三次元座標測定装置において実行されるプログラム
【課題】対象物の三次元座標を安定して求めることが可能な三次元座標測定装置及びプログラムを提供すること。
【解決手段】メインレンズと、複数の単位レンズから構成される複眼レンズとを備える外部の撮像装置によって撮像されて得られた、各単位レンズに対応する単位画像データから構成される特殊画像データを入力する入力手段と、メインレンズによる像の全部又は一部を結像させ得る仮想結像面と撮像装置の主点との距離である仮想結像距離を変化させることにより、仮想結像距離ごとに特殊画像データから画像を生成する生成手段と、生成された各画像からピントが合っている領域を検出する検出手段と、検出された各領域に映る対象物と撮像装置の主点との距離を各仮想結像距離に基づいて算出する算出手段と、算出された距離に基づいて各対象物の三次元座標を決定する決定手段とを備える三次元座標測定装置。
(もっと読む)
車両周辺監視装置
【課題】暗所における車両周辺監視画像の視認性および信頼性を向上させることができ、ひいては、暗所における安全かつ円滑な運転操作を支援することができる「車両周辺監視装置」を提供すること。
【解決手段】自車両の暗所の走行の際に、監視範囲における照明装置28,29,30の輝度が所定の閾値輝度以上の状態として照明装置28,29,30の光が有効に照射される範囲である有効照射範囲を把握したうえで、車両周辺監視画像上に、車両周辺監視画像における有効照射範囲の撮影映像を用いて生成された部位である有効照射部位を識別するための識別画像を表示する識別画像表示処理装置31を備えたこと。
(もっと読む)
表面欠陥自動検査装置および検査方法
【課題】
金属などの部材やそれらに金属皮膜を形成した表面で、光学的に全反射ないしはそれに近い状態の表面は、全反射による鏡面反射光が強く、表面欠陥の検出に有用なランダム反射光を検出することは困難である。このため従来技術では、表面欠陥検査の自動化は困難であった。
【解決手段】
本発明は、評価対象物とカメラを固定し,点光源の位置を変えて、または複数位置に配置した点光源を順次点灯することにより、複数枚の表面画像を計測する工程、金属表面反射モデルを用いて強い鏡面反射を削除し微小なランダム反射を抽出する工程、複素数離散ウェーブレット変換を用いてノイズ除去や欠陥鮮鋭化などを行う工程、パターンマッチングにより欠陥を検出する工程などの組み合わせにより、評価対象物の表面欠陥、特に金属皮膜が形成された鏡面状態の部材や部品の表面欠陥の自動検査装置とその検査方法を提供する。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】単一の受光素子で多バンドの画像を生成する。
【解決手段】プロジェクタ14は、画像処理装置11のパターン制御部21により生成された複数の2次元配列パターンで発光し、被写体に光を照射する。分光測定部15は、照射され、被写体16で反射される光を複数の周波数バンドで分光測定し、スペクトルデータを生成する。伝達率計算部24は、プロジェクタ14で発光する複数の2次元配列パターンと、2次元配列パターンに対応して分光測定部15により測定されたスペクトルデータとに基づいて、各周波数バンドの伝達率を計算する。画像生成部25は、伝達率計算部24により計算された伝達率に基づいて、所望とされる周波数バンドの画像を生成する。本発明は、分光画像撮像装置に適用することができる。
(もっと読む)
161 - 180 / 344
[ Back to top ]