
Fターム[5B057BA15]の内容
Fターム[5B057BA15]に分類される特許
141 - 160 / 344
基板外観検査方法および基板外観検査装置
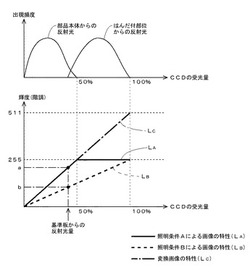
【課題】はんだ付け部位および部品本体がともに明瞭で、両者間の実際の明るさの関係を反映した検査用画像を生成する。
【解決手段】検査の前に、部品本体の撮像に適した照明条件Aと、はんだ付け部位の撮像に適した照明条件Bとを設定し、各照明条件下での画像の輝度比を求め、登録しておく。検査では、各照明条件A,Bを順に設定して条件毎に撮像を行った後、照明条件Aによる画像(ラインLA)のうちの飽和レベルに達している画素を、照明条件Bによる画像(ラインLB)の対応画素のデータと登録された輝度比との乗算値に置き換えることにより、飽和レベルの画像データを本来の明るさを表す画像データ(ラインLC)に変換する。その後は、ラインLAおよびラインLCに対応する画像を用いて、部品本体およびはんだ付け部位に対する検査を実行する。
(もっと読む)
画像表示装置及び画像表示方法

【課題】照明光が照明された撮影対象物を撮影した画像により、撮影対象物の形状を明確に捉えることのできる画像表示装置及び画像表示方法を提供する。
【解決手段】撮影対象物2のまわりをかこむ周囲の複数の位置のそれぞれから順次照明光Lを撮影対象物2に照明したときの撮影対象物2の画像がカメラ3によって撮影される。そして該撮影により得られた複数の撮影画像にわたって対応する画素の明度の平均値が撮影画像の画素ごとに算出され、該算出された各平均値が、表示装置6に表示させる撮影対象物2の画像における対応画素の明度として設定される。
(もっと読む)
画像計測装置、画像計測方法及びコンピュータプログラム
【課題】操作者が熟練を要することなく最適な照明方式を選択することができ、高い精度で所望の形状を計測することができる画像計測装置、画像計測方法及びコンピュータプログラムを提供する。
【解決手段】落射照明手段を用いて撮像手段で計測対象物を撮像した第一の画像データと、透過照明手段を用いて撮像手段で計測対象物を略同じ位置にて撮像した第二の画像データとを記憶しておく。第一の画像データを表示し、表示された第一の画像データ上で計測位置の指定を受け付ける。指定を受け付けた計測位置に応じて第一の画像データ又は第二の画像データを記憶手段から読み出し、読み出した第一の画像データ又は第二の画像データに基づいて位置データを取得する。取得した位置データに基づいて、指定を受け付けた計測位置での計測を実行する。
(もっと読む)
画像処理装置、及びプログラム
【課題】被験者の実際の視界の模擬を実施する。
【解決手段】撮像装置30、及び視点検出装置32の各々は、車両に搭載されて、同期をとって所定の時間間隔で複数回動作するように制御され、複数回の動作により生成された、被験者周辺の周辺画像の各々の画像データと、周辺画像の各々の撮像時における被験者の周辺画像上の視点の位置を示す位置データとを関連付けて取得する。
視覚特性フィルタ36を用いた画像処理を行うことで、人間の視覚特性に合った見え方を模擬すると共に、記憶特性フィルタ38を用いた画像処理を行うことで、人間の感覚記憶特性に合った見え方を模擬する。
画像合成部42は、処理済画像の各々を合成して再現画像を生成し、実際に運転をした被験者が行った情報処理を模擬することができる。
(もっと読む)
車両用周辺監視装置
【課題】撮像素子に入射される光の輝度が高い場合にもピントの合った映像を得ることができる車両用周辺監視装置を提供することを目的とする。
【解決手段】車両周辺の映像を取得する映像取得部と、前記映像取得部の取得した映像を処理する信号処理部と、を有する車両用周辺監視装置であって、前記映像取得部は、第1の波長領域の光が選択的に入射される第1の撮像素子と、前記第1の波長領域よりも長波長の第2の波長領域の光が選択的に入射される第2の撮像素子と、を有し、前記信号処理部は、前記車両周辺の輝度を判定する輝度判定手段と、前記第1の撮像素子で撮像された第1の映像と、前記第2の撮像素子で撮像された第2の映像とを合成する映像合成手段と、を有し、前記映像合成手段は、前記輝度判定手段の判定結果に基いて、前記第1の映像及び前記第2の映像を所定の重みを付けて合成することを特徴とする。
(もっと読む)
被災監視装置及び被災監視方法
【課題】河川管理設備のように特徴的な形状を持たない監視対象エリアの被災状況を簡単かつ正確に検出可能とする。
【解決手段】地震が発生した場合に、地震発生直後の監視対象エリアを監視カメラCMにより撮像し、その撮像画像データをその明度に応じてグレースケール画像に変換したのちしきい値V0 に従い二値画像データに変換し、この変換された二値画像データから監視対象エリアの凹部に対応する「黒画素」を抽出してその面積Mを算出する。そして、この算出された面積値Mとメモリ26に記憶された参照値M0との差分値M−M0 を算出し、この算出された差分値M−M0 をメモリ27に記憶されたしきい値dと比較し、M−M0 >dの場合に河川管理施設の監視対象エリアが被災したと判定して、警報メッセージと上記地震発生直後の撮像画像データを監視センタCSへ送信する。
(もっと読む)
画像処理装置、画像処理プログラムおよび表示装置
【課題】光線の進行方向の情報をも含むようにして取得した撮像データに基づいて任意の焦点に設定された画像を再構築する際に、適切なリフォーカス係数を瞬時に設定することが可能な撮像装置およびこれを用いた表示装置を提供する。
【解決手段】撮像装置1は、撮像レンズ11、マイクロレンズアレイ12、撮像素子13、画像処理部14、撮像素子駆動部15、制御部16を備える。画像処理部14では、距離情報抽出部143により、光線の進行方向の情報をも含むようにして取得した撮像データに基づいて所定の距離情報が抽出され、リフォーカス係数設定部149により距離情報に基づいてリフォーカス係数αが設定される。並べ替え処理部144では、リフォーカス係数設定部149により設定されたリフォーカス係数αに基づいて、撮像データの並べ替えがなされる。
(もっと読む)
解像深度が強化された3次元顕微鏡法のための方法及び装置
【課題】非常に強化された深度即ちZ方向の分解能を提供する3次元光学顕微鏡法のための方法及び装置を提供する。
【解決手段】標本(94)についてデュアル対向対物レンズ(70、72)及び拡張インコヒーレント照明(84)を用いて向上された深度分解能を提供する3次元光学顕微鏡法のための方法及び装置が開示される。両対物レンズからの観察光は画像検出器(128)に入射され、ここで光路長調節器(138)によって干渉させられる。
(もっと読む)
車両障害物検出装置及び車両障害物検出方法
【課題】車両側方の道路形状を含めた車両走行に障害となる障害物の検出精度を高めることを課題とする。
【解決手段】車両側方に車両側端から所定の長さの障害物検出用光線を照射する光線照射手段11と、光線照射手段11から照射された障害物検出用光線を含む所定の範囲を撮影する撮影手段12と、撮影手段12で撮影された障害物検出用光線をトレースして得られる障害物検出用光線の状態変化を画像処理手段13で検出し、その検出結果に基づいて車両側方の障害物を検出して構成される。
(もっと読む)
ローリングシャッタカメラからの合成静止画像におけるノイズ及びブレを低減する効果的な方法
【課題】高性能ローリングシャッタ式カメラを提供すること。
【解決手段】所与の露光時間の各写真画像が、モーションブラーを最小限に抑え、平均化によってセンサノイズを低下させるために、それぞれがより短い露光時間を有するフレームの複数フレームのバーストとして取り込まれる。各フレームが帯状部分に量子化され、ローリングシャッタによって順次に取り込まれる。第1のフレームの帯状部分が、一組の最良の動き検出参照領域を選択するために分析される。必要な計算を低減するために、後続のフレームの帯状部分がこれらの領域のみに対して分析され、それに応じて再位置合わせされる。各フレームの対応する帯状部分が蓄積される。アキュムレータが所望のビット深度に正規化され、最終画像として書き込まれる。複数のフレームの平均化が、フレーム全体でなく帯状部分を再位置合わせすることによって改善される。
(もっと読む)
顔認証装置
【課題】光変調画像と画角が同一となる可視画像を光変調画像と同時に得る。
【解決手段】本実施形態の顔認証装置Aでは、可視画像を出力する第2の撮像手段(可視光フィルタ8とカラーカメラ9)と、第1の撮像手段(赤外光フィルタ5と光変調カメラ6)の受光光軸と第2の撮像手段の受光光軸を対象空間に対して一致させる光学系(結像レンズ3とハーフミラー4)とを備えている。故に、光変調画像と画角が同一となる可視画像を光変調画像と同時に得ることができる。
(もっと読む)
画像変換装置および画像変換方法
【課題】 魚眼レンズを用いた撮影により得られた歪曲円形画像を平面正則画像に変換する際に、ユーザの直観的な操作によりパラメータ設定を行い、演算負担を軽減させる。
【解決手段】 XY平面上の歪曲円形画像S上にドーム状の仮想球面Hを定義し、歪曲円形画像S上において、ユーザに、切出中心点P(x0,y0)と補助点Q(x1,y1)を指定させる。点Pの真上の交点G(x0,y0,z0)を求め、仮想球面Hに対する接平面S2上にUV平面を定義する。U軸とX軸とのなす角φは、2点P,Qを通る参照直線JとX軸とのなす角θに基づいて決定する。座標値x0,y0,z0と角度φをパラメータとして含む正射影方式の変換演算式を利用して、座標(u,v)と座標(x,y)とを対応づけ、2点P,Q間の距離を変換倍率mとして、歪曲円形画像Sの点Pの近傍部分をUV平面上の平面正則画像に変換する。
(もっと読む)
欠陥検査装置、欠陥検査方法及び板状体の製造方法
【課題】透明性を有する板状体中の欠陥の、板状体の厚さ方向の位置を測定する際、2台のカメラの位置合わせやキャリブレーションを必要としない、簡易な構成の装置で欠陥の位置を測定する。
【解決手段】欠陥検査装置は、カメラと、板状体とカメラとの間に設けられたハーフミラと、を有する。これにより、カメラは、2つの異なった角度の視線で欠陥の像を撮影する。この2つの視線で撮影した欠陥の像同士の位置ずれ量に基づいて、欠陥の位置を算出する。
(もっと読む)
画像処理方法、画像処理装置及び画像形成装置
【課題】レンズ光学系を通して撮像素子により撮像された画像についての歪み補正及びシェーディング補正の画像処理に関する回路規模及び処理時間の縮小化を実現できる画像処理方法、画像処理装置及び画像形成装置を提供する。
【解決手段】この画像処理方法は、レンズ光学系を通して撮像素子により撮像された画像について画像処理を行うものであり、レンズ光学系の光学特性に基づいてそれぞれ得た歪み補正係数及びシェーディング補正係数を保存し、レンズ光学系を通して撮像素子で撮像された画像について歪み補正係数に基づいて歪み補正を行うとともに、歪み補正に用いた画素データ及びシェーディング補正係数に基づいてシェーディング補正を行う。
(もっと読む)
情報取得装置、情報取得方法および情報取得プログラム
【課題】対象物の分光画像と距離画像を同時に取得する。
【解決手段】少なくとも3チャンネルの分光感度を有し、撮像対象物の画像データを取得する第1の撮像手段と、少なくとも3チャンネルの分光感度を有し、該3チャンネルの分光感度のうちの1チャンネルが第1の撮像手段が有する分光感度のうちの1チャンネルと同一の分光感度であり、他のチャンネルの分光感度が第1の撮像手段が有する分光感度と異なる分光感度を有し、撮像対象物の画像データを取得する第2の撮像手段と、分光感度が同一のチャンネルである第1の撮像手段による画像データと、第2の撮像手段による画像データとを用いて、距離画像情報を生成する距離画像生成手段と、第1の撮像手段と第2の撮像手段のそれぞれが有する各チャンネルの画像データから分光画像情報を生成する分光画像情報生成手段とを備えた。
(もっと読む)
車両ナンバー撮影システム、車両ナンバー撮影方法
【課題】定点監視カメラの設置場所において撮影環境の変化に対応して、常に安定した明るさで、通行車両のナンバープレートを撮影および認識できるようにする。
【解決手段】この車両ナンバー撮影システムは、撮影方向を道路に向け、少なくとも視野の一部に道路を走行する車両21のナンバープレート22が入るように路側部に配設され、外部から制御を受けて受光量を可変して映像を撮影する動画撮影用のカメラ2aと、このカメラ2aからナンバープレート22の位置の奥手に配設され、所定の反射率を持つ基準面1aを有する基準板1と、カメラ2aで撮影された基準板1を含む範囲の光量を所定期間サンプリングして得た明度値の中から、通過した車両のナンバープレート22の明度値を除外した明度値を得る基準明度算出部4と、取得された明度値と予め設定された明度値との差分に応じてカメラ2aの受光量を制御する制御部5とを備える。
(もっと読む)
操作者識別装置
【課題】車載装置を操作する者を精度良く識別する操作者識別装置を提供する。
【解決手段】操作者識別装置3は、運転者座席11と同乗者座席12の間に近赤外線4Aによって透過照明を行うことができるセンサモジュール30が設けられたアームレスト13を有している。センサモジュール30は、近赤外線4Aを発光する発光ダイオード301と、対象物からの反射である反射光4Bを受光して電気信号を出力するフォトダイオード302と、を有する。アームレスト13の前方に設けられたスイッチ部14を操作する者がいるとき、ECU31は、フォトダイオード302から出力された電気信号に基づいて生成された画像データに対して2値化処理及びラベリング処理を行い、ラベリング処理によってラベリングされた第1及び第2の連結成分63、64を解析することによって、スイッチ部14を操作する者が、運転者2Aなのか同乗者2Bなのかを識別することができる。
(もっと読む)
防振画像処理装置及び防振画像処理方法
【課題】撮像装置の大きく、かつ複雑な動きに伴う画像の振れを良好に抑制する。
【解決手段】画像処理装置110は、動き検出センサ104を用いて得られる動き情報に基づいて、撮像により順次生成されるフレーム画像のうち第1のフレーム画像に対する幾何変換処理を行う幾何変換手段1100と、幾何変換処理により得られた幾何変換画像と該幾何変換処理を受けていない第2のフレーム画像間での動きベクトルを検出する動きベクトル検出手段1101と、動き情報と動きベクトルをそれぞれ用いて、互いに異なる動きに対する防振パラメータを算出する防振パラメータ算出手段1102と、防振パラメータを用いて第2のフレーム画像又はこれよりも後に生成されるフレーム画像に対する変形処理を行って防振画像を生成する防振画像生成手段1103とを有する。
(もっと読む)
非接触三次元計測方法及びその装置
【課題】本発明の目的は、ワークの三次元形状情報の広範囲測定を良好に行うことのできる非接触三次元計測装置を提供することにある。
【解決手段】非接触プローブ12の測定位置を二軸方向に平行移動することによりワーク20を異なる測定位置から分割測定し該分割測定された複数のデータを統合することにより該ワーク20の三次元形状情報を得る広範囲測定を行う非接触三次元計測装置10であって、測定位置に静止した状態で視野に入るワーク20上の各点の位置情報を検出し該測定位置でのデータを得る該プローブ12と、該プローブ12の測定位置を二軸方向に平行移動する位置変更手段16と、該プローブ12の測定位置情報を得る位置検出手段16と、該非接触プローブ12の平行移動量に基づき該隣り合う測定位置で得られた複数データの平行移動方向の位置合わせを行う統合手段18とを備えたことを特徴とする非接触三次元計測装置10。
(もっと読む)
画像読み取り装置、画像形成装置
【課題】搬送される記録材に浮きが生じた場合であっても、この記録材に対する画像の形成位置を把握する。
【解決手段】撮像部60は、テスト画像が形成され副走査方向に搬送される用紙Pにスポット光を照射して用紙Pにスポット光像を形成する第1スポット光源63および第2スポット光源64と、副走査方向に搬送される用紙Pに形成されたテスト画像の主走査方向位置およびスポット光像の主走査方向位置を、縮小光学系を用いて読み取るCCDイメージセンサ67と、CCDイメージセンサ67で読み取られたスポット光像の主走査方向位置を用いて、CCDイメージセンサ67で読み取られたテスト画像の主走査方向位置を補正する制御部とを備える。
(もっと読む)
141 - 160 / 344
[ Back to top ]