
Fターム[5B057BA17]の内容
Fターム[5B057BA17]に分類される特許
341 - 353 / 353
コーンビーム・コンピュータ断層撮影法
コーン又はウェッジビーム・コンピュータ断層撮影投影データを再構成する画像再構成方法であって、同様の角度的な向きを有する投影データを関連づけるよう投影データをリビニングする段階と、検出器開口内でのその角度的な向き又はその位置のうちの少なくとも一方に基づいて投影データを重み付けする段階と、体積画像表現を形成するよう前記重み付けされた投影データを再構成する段階とを含む。1つの望ましい実施例では、重み付けする段階は、(a)同じ角度的な向きを有するか、(b)選択された1つ又はそれ以上の複数の平行な処理パイプラインへと180°の整数倍だけ角度的に離されているかのいずれかである、選択された画像要素に関連づけられるリビニングされた投影データを分配する段階と、重み付けされた投影データを生成するよう、選択された1つ又はそれ以上の並列処理パイプラインの出力を結合する段階とを含む。  (もっと読む)
(もっと読む)
コンピュータ断層撮影用のダイナミック検出器インターレーシング
【課題】 データ収集システムおよびこれに関連する信号処理電子機器の、コスト、複雑さ、および、バンド幅を増加させないこと。収集時間または検出器エリアを、それぞれ、減少させることによって、信号対ノイズ比も減少させないこと。
【解決手段】 コンピュータ断層撮影(CT)スキャナ(12)用のデータ収集システム(DAS)(30)は、CTスキャナ(12)によって生成されるエックス線を検出するように配置されている検出器(34)の二次元アレイ(32)を含む。各々の検出器(34)は、軸方向(Z)に沿って、2個のサブ検出器(34a、34b)に分けられている。高速スイッチング回路(40)は、選択される隣接サブ検出器の出力(34a、34b)を結合し、たとえば、サブ検出器nをサブ検出器(n-1)および(n+1)と交替で結合する。高速スイッチング回路(40)は、軸方向(Z)に沿って、インターレースされたDASの出力信号を生成するように、DAS測定値間で、その設定をスイッチする。  (もっと読む)
(もっと読む)
拡大観察装置、画像ファイル生成装置、画像ファイル生成プログラム、3次元画像表示プログラム及びコンピュータで読み取り可能な記録媒体又は記録した機器
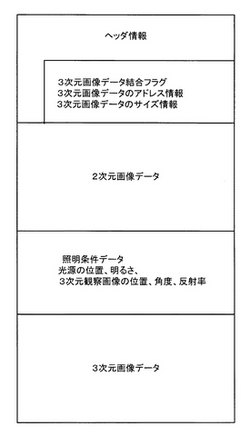
【課題】照明を付した3次元画像を容易に管理、扱うことのできる拡大観察装置等を提供する。
【解決手段】拡大観察装置は、観察対象を撮像して2次元観察画像を取得するための撮像部と、撮像部で取得した複数の2次元観察画像と、撮像時の高さ情報に基づいて、観察対象の3次元の観察画像を生成すると共に、3次元観察画像に対して仮想的に光源を配置し、光源から発する照明光を3次元観察画像に照射して生じる光の反射の状態を表現した反射付3次元観察画像を生成可能な制御部と、光源によって得られる照明の効果を調整可能な照明設定部と、制御部で生成された3次元画像データ及び照明設定部で設定された照明条件データとを任意の2次元画像データに埋め込んで、一の画像データファイルとして生成可能なファイル生成部と、ファイル生成部で生成された画像データファイルを保存するための画像データ記憶部とを備える。
(もっと読む)
画像処理装置及び方法、プログラム

【課題】 各カメラから得られる画像におけるスキャンライン上にある全ての画素につき動的な対応付け(伸縮マッチング)として取り扱うことにより、画像間の対応付けをよりロバストかつ高精度に行う。
【解決手段】 少なくとも2台のカメラ11、12により互いに異なる視点から被写体を撮像することにより得られた各画像間において、被写体と関連させつつ互いに同一の水平ライン上にある画素位置毎に対応関係を求め、一の水平ラインの画素位置毎に求めた対応関係と当該一の水平ラインの上下方向に位置する他の水平ライン上の各画素位置につき求めた対応関係とを比較し、かかる比較結果に基づいて当該一の水平ラインにつき求められた対応関係を修正する。
(もっと読む)
駐車車両検知方法及び駐車車両検知システム
【課題】 駐車車両の調査を、走行する調査車両を使用して効率的で精度良く行う。
【解決手段】 路上を走行する車両から路上の対象物を水平方向に複数回ラインスキャンしてエピポーラ平面画像(EPI画像)を取得する工程と、前記取得したEPI画像から、撮像した対象物に関する一以上の特徴軌跡を抽出する工程と、抽出した対象物の特徴軌跡の傾きを演算する工程と、演算した特徴軌跡の傾きと前記移動体の移動速度とに基づいて、対象物までの距離を演算する工程と、演算した対象物までの距離に基づいて駐車車両の有無を判別する工程とを備えた。
(もっと読む)
マシンビジョン検出器の設定および試験の方法と装置
連続運転中の製産ラインから演習画像が得られ、物体の実際の製造および検査の際、実質同様の状態を提供することができるビジョン検出器を設定するための、システムおよび方法が開示される。視覚検出器が物体の検査のためにトリガ信号を使用するか、しないかにかかわらず、演習画像はトリガ信号を必要としない。さらに、生産工程からの限られた枚数の画像を選択、保存、表示することによって、視覚検知器の試験を行うためのシステムと方法が開示され、それらの画像は誤った決定を示しがちな物体に対応する。 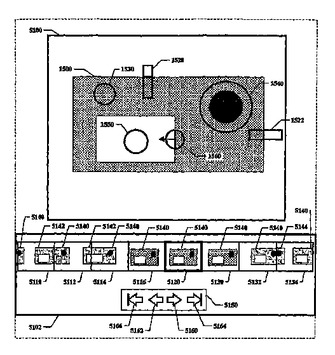 (もっと読む)
(もっと読む)
ビデオフラッシュライトを実行する方法およびシステム
没入型監視システムでは、多数のカメラとその他のセンサからのビデオ又はその他のデータが、場面のレンダリング2D又は3Dモデル内にデータを重ね合わせるビデオ処理システムにより処理、表示される。システムは、ユーザが、サイトをそこから見るための視点を選択的に識別することができるように構成された視点セレクタを有する。ビデオ制御システムは、視点を識別するデータを受け取り、その視点に基づいて、その視点からの視界に関連するビデオを生成する複数のカメラのサブセットを自動的に選択し、そのカメラのサブセットからのビデオを、ビデオ処理システムに送信させる。視点が変化するにつれて、ビデオプロセッサと通信を行うカメラが変更されて、新しい位置に関連するビデオを生成するカメラに引き渡される。没入型環境における再生が、タイムスタンプ付きのビデオ記録の同期によりなされる。 (もっと読む)
単一像から、3D物体の測定、モデリングおよびマッピングのためのシステム、コンピュータプログラムおよび方法
少なくとも1つの3次元物体の単一画像から、3次元測定情報を導出し、かつ/または3次元モデルおよびマップを作成するための方法が提供される。前記方法は以下のステップを含む。(a)物体の少なくとも1つの前記物体の2次元単一画像を取得し、該画像は画像データから構成されて画像幾何モデル(IGM)に関連付けられること、(b)IGMに基づいて、画像に関連付けられた3次元座標情報を導出し、3次元座標情報を画像データに関連付けること、(c)(i)IGMを使用して物体の投影を測定し、物体に関する高さおよび/または点間距離を含む測定データを導出し、かつ/または(ii)物体の影を測定し、物体に関する高さおよび/または点間距離を含む測定データを導出するように画像データを分析すること、および(d)物体の投影および/または影の測定に基づいて3次元測定結果を取得すること。前記方法の別態様において、前記方法は投影および/または影の測定に基づいて3次元モデルまたはマップを作成するステップをさらに含む。一連のアルゴリズムは、本発明の方法を処理するためにも提供される。少なくとも1つの3次元物体の単一画像から、3次元測定情報を導出し、かつ/または3次元モデルおよびマップを作成するための、コンピュータシステムおよび関連コンピュータプログラムも、開示した方法に基づいて提供される。 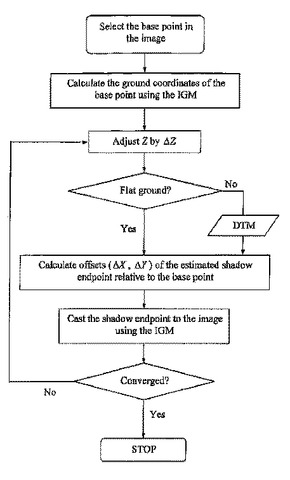 (もっと読む)
(もっと読む)
手術用ナビゲーションシステム(カメラプローブ)
【課題】手術部位内のナビゲーションのシステム及び方法を提供する。
【解決手段】本発明に係わる実施形態では、トラッキング装置でトラックされる、携帯のナビゲーションのプローブに、マイクロカメラを設けている。これにより、プローブ内に設けたマイクロカメラの視点からのリアルタイム画像を見ながら、手術場面内でナビゲーションが可能となる。手術場面には、術前の走査から生成された対象構造のコンピュータ3次元画像が、重ね合わされている。カメラ画像および重ね合わせ3次元画像の透明性の調整で、深さの認識を強めることができる。プローブ先端と重ね合わせの3次元構造との距離、すなわちプローブから延びた仮想の放射線に沿った距離が、組合せた画像に動的に表示される。本発明の実施形態では、仮想インターフェイスが、組合された画像に隣接してシステムの表示装置に表示される。これによりナビゲーションに関わる機能が促進される。 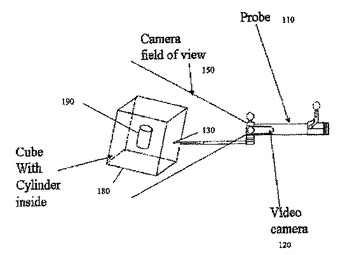 (もっと読む)
(もっと読む)
医療適用で画像位置合わせ及び画像操作を容易とするプローブ位置測定
【課題】 画像形成中にセンサ位置及び向きを正確に知ることができる医療画像処理に関する方法を提供することを目的とする。
【解決手段】 医療画像処理適用に関連する画像を位置合わせするのに撮像プローブを用いる方法は、(a)撮像プローブがその中で用いられるローカルな領域中にフィールドを発生するローカル追跡システムを設ける段階と、(b)略同じ対象を表わす第1及び第2の画像を捕捉する段階と、(c)画像捕捉中の撮像プローブの位置座標を決定するのにローカル追跡システムからのフィールド放射を感知する段階と、(d)第1及び第2の画像を位置合わせするのに位置座標を用いる段階と、(e)対象の特徴を決定するのに位置合わせされた画像を用いる段階とを有する。
(もっと読む)
ビジュアルサーボによる位置姿勢制御方法
【課題】 ビジュアルサーボによる位置姿勢制御においてカメラの縦揺れ角および偏揺れ角(姿勢角)の検出精度向上を図る。
【解決手段】 ロボット本体11は、制御装置12により位置の移動と姿勢の駆動制御がなされる。CCDカメラ15は、ロボット本体11の上アーム20に固定され、ワークWを撮影する。あらかじめ参照画像として基準位置からワークWを撮影したデータを記憶させる。制御装置12は、カメラ15で撮影した画像と参照画像のデータとに基づいてビジュアルサーボにより位置姿勢の制御を行なう。収束した段階では、カメラ15を姿勢角を所定以上傾けて画像データを取得する。このとき各画像での姿勢角と参照画像のデータとの誤差値を演算し、誤差値が最も小さくなるときの姿勢角を推定し、補正量として求める。この補正量だけ位置姿勢を制御することで、精度の高い制御を行なうことができる。
(もっと読む)
光学機器の調整および検査システム
【課題】 単純な構成で且つ精度の高い位置補正を行い、かつ、シェーディング補正を行うことのできる光学機器の調整および検査システムを提供する。
【解決手段】 チャート100を用いて基準画像を撮影し、撮影した基準画像から相対座標基準点の絶対座標と、取得したい画像特性のある座標を相対座標基準点からの相対座標で表して水平垂直方向の位置補正量を導出する第1の演算手段(CPU401および記録装置402)と、チャート100を撮影して前記相対基準点近傍を走査して前記相対座標基準点の絶対座標を求め、基準画像と撮影画像の相対座標基準点とを比較して水平垂直方向の画角補正を行う第2の演算手段(CPU401および記録装置402)とを備えた。
(もっと読む)
画像データサイズ変換処理装置、電子スチルカメラ、および画像データサイズ変換処理用記録媒体
【課題】画像データの色成分が有するベイヤー配列を保持してデータサイズ変換処理を行う。
【解決手段】CCD26は画素領域上に配置されているベイヤー方式の色分解フィルタを通して被写体像を撮像し、画像処理回路29はCCD26から出力されるN行M列の画像データに対してγ補正、ホワイトバランスなどの種々の画像前処理を行う。画像前処理後の画像データはホワイトバランス微調整処理された後、JPEG圧縮前のフォーマット処理(画像後処理)される。画像後処理後の画像データは圧縮回路33で圧縮される。画像データサイズ変換回路240は、ホワイトバランス微調整処理後の画像データに対して、1画素とびの2画素分の同色信号を用いてリニア補間的に1画素分のデータの大きさを算出してデータサイズを変換する。サイズ変換後の画像データはn×m(N>n,M>m)のブロック単位で信号処理する補間/輪郭処理回路220でフォーマット処理される。
(もっと読む)
341 - 353 / 353
[ Back to top ]