
Fターム[5B057CC01]の内容
Fターム[5B057CC01]の下位に属するFターム
局所領域処理を全体に施すもの (2,089)
Fターム[5B057CC01]に分類される特許
3,181 - 3,200 / 3,330
デジタル画像の自動補正のためのシステムおよび方法

【課題】 デジタル画像キャプチャデバイスによってキャプチャされた画像を補正するためのシステムおよび方法を提供する。
【解決手段】 この方法は、サンプル点およびその点の目標値に基づいて所望の補正値の対数を計算することと、入力ピクセル強度に基づいて照度の対数の近似を計算することとを含む。この方法は、補正値の対数および照度の対数の近似に基づいて任意の目標ピクセル強度値を計算することをさらに含む。画像補正ツールは、目標ピクセル強度値に対応するように画像を補正する。この技法は、任意の画像の利得を補正するために使用することができ、例えば、露出またはホワイトバランスの欠点を補正することができる。この技法は、画像キャプチャデバイスに関係なく、優れた結果を提供する。
(もっと読む)
量子化した表示システムにおけるガンマ精度の向上

ここに量子化した表示システムにおける改善したガンマ精度を提供する実施例を説明する。実施例のシステムおよび方法の両方が3原色および多原色表示システムにおける画像品質を向上するために提供される。 (もっと読む)
周辺界の画像を表示するための装置及び方法
使用者に周辺状況の画像を表示するための装置及び方法は、周辺界の画像情報を記録し、伝達装置20を介して中央ユニット30に接続される画像センサー装置10と、中央ユニット30が前記画像センサー装置10からの画像を表示する頭部搭載型の表示装置40とを備えている。本発明は、中央ユニット30が仮想3次元界を生成し、画像情報8が3次元界にテクスチャとして画像センサー装置10から即時に投射される。そのとき、3次元界の一部が、表示装置40に即時に表示される。 (もっと読む)
画像クリーンアップおよび前置符号化
デジタル画像をフィルタ処理する方法が説明されている。第1のフィルタリングパラメータに従って、デジタル画像内のノイズを平滑化し、デジタル画像内の画像エッジに関連する空間周波数を保存するために、ピクセルの集合内のそれぞれのピクセルに対しフィルタカーネルが適用される。フィルタカーネルは、それぞれのピクセルの関数となっており、それぞれのピクセルに対する閉形式を持つ。フィルタカーネルは、隣接ピクセルの第1の集合からの寄与因子を含み、フィルタカーネル内の要素の和が実質的固定値に等しくなるように、内容依存の正規化が行われる。  (もっと読む)
(もっと読む)
電子カメラのシェーディング補正データ取得方法及び画像処理装置
【課題】仮想的な均一光源を基にカメラのシェーディング補正データを得て、カメラで撮影した画像のシェーディングを補正することができるカメラのシェーディング補正データ取得方法及び画像処理装置を得ること。
【解決手段】本発明の画像処理装置100は、カメラ110とコンピュータ120とが接続されており、そしてそのカメラ110を移動させる移動機構130を備え、その移動機構130によりカメラ110の撮像レンズ111を光源に近づけて仮想均一な光源を得て、この光源を基にカメラ110のシェーディング補正を行い、そしてシェーディング補正データを得て、カメラ110で撮影した画像のシェーディングを補正することができることを特徴とする。
(もっと読む)
画像ノイズを低減することによる画像データ処理方法および該方法を実行するカメラ組み込み手段
本発明は、学習領域(ZA)を画像(IM)の基準点(Pref)に関連付けるステップと、学習領域の各可変点(PC,PC’)について、基準点に中心を有する、画像の第1のウインドウ(f1)内の点の値と、第1のウインドウと同様のフォーマットで、可変点に中心を有する、画像の第2のウインドウ(f2、f'2、)内の点の値の差間の距離(d、d’、)を求めるステップと、学習領域のすべての点について前記距離計算を繰り返し、基準点に割り当てる平均値を求めるステップを有し、前記平均は各可変点について求められた距離に基づいて重み付けされたものである、ノイズ低減による画像データ処理に関する。 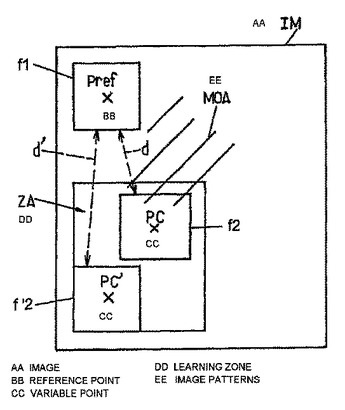 (もっと読む)
(もっと読む)
監視装置及びプログラム
【課題】 人が発報装置を携帯・操作することなく防犯サービスを享受でき、監視者が広い監視区域を少ない労力で監視でき、なおかつ警察の初動捜査にも貢献しえる装置を提供する。
【解決手段】 検知部11において監視区域内から発せられた物理信号及びその発信位置を検知し、画像撮影部12において監視区域内の画像を時系列的に撮影し、撮影された画像情報を、その撮影時刻に対応付けて画像記憶部13に記憶する。そして、検知結果解析部14において、検知部11が検知した物理信号が所定の設定条件を満たした場合に、その物理信号の発信位置(対象地点)及び検知時刻(検知位置)を抽出し、画像抽出部15において、この検知時刻を含む時系列的な期間である抽出期間内に画像撮影部12が撮影した画像情報を、画像記憶部13から抽出する。その後、被疑物体画像抽出部16において、画像抽出部15が抽出した画像情報を解析し、対象地点に接近する物体の画像を抽出する。
(もっと読む)
色覚異常者への色存在の教示方法および教示プログラム
【課題】色覚異常者が混同する色を周囲に気兼ねなく見分けることができる色覚補助ツールの提供。
【解決手段】見えない又は見え難い色から混同中心色(例えば、混同色中心PTD)を設定し、カラーの元画像から画素単位でその混同中心色に対する画素の色の色差に対応したグレースケール階調値を求めてグレースケールを作成し、このグレースケールに基づいてグレースケール画像または同系色のグラデーション画像を作成して表示する。カメラ付き携帯電話を使用して実行すれば、カメラで撮影した画像を変換してグレースケール画像を作成し、ディスプレイ上に表示させることができる。
(もっと読む)
画像を補間および補正する方法および装置
本発明は、ディジタル画像を補間および補正する方法および装置に関する。ソース画像は複数のフィルタ計数を有するFIRフィルタを用いて目標画像にマッピングされる。フィルタ係数は画像を補間するための情報も、画像を補正するための情報も包含するので、単一の処理ステップで補間も補正も実施される。ソース画像を目標画像にマッピングする本発明による方法をハードウェア回路により簡単に実現することができるので、装置、殊にスキャナにおけるマッピングは全体のプロセス経過に遅延が生じることなく実施される。  (もっと読む)
(もっと読む)
色処理方法およびその装置
本発明は、表示装置のキャラクタリゼーションを行う方法を提供する。まず、複数の色を表示装置上で生成する。生成した色の色値を測定し、黒色点と白色点を決定する。そして、複数の色度値を得るために、測定した色値を決定した黒色点に関して補正する。補正した色値の色度値を平均化し、平均化した色度値と決定した白色点から三刺激行列を生成する。本発明は、黒色点を補正した測定値の色度値を平均化することで、フレアの影響を考慮した、より正確な表示装置のキャラクタリゼーションを行う。さらに、黒色点を補正した測定値の色度値を平均化することで、装置のキャラクタリゼーション処理の間に行われる不正確な測色の影響を最小にする。  (もっと読む)
(もっと読む)
変換ベースカラープロファイルからの測色値の生成、および、測定ベース色管理システムによる変換ベースプロファイルの作成
測色値は、測定ベース色管理システム(CMS)が使用する変換ベースデバイスプロファイルから生成される。デバイスに依存する色サンプルを変換ベース色管理モジュール(CMM)に供給し、デバイスの変換ベースプロファイルを使用して、色サンプルをプロファイル接続空間(PCS)に変換し、測色値を生成する。変換ベースCMMは、デスティネーションデバイスプロファイルの代わりにアイデンティティプロファイルを適用することで、測色値を生成する。さらに、測定データは、色再現カーブ/行列から、または、変換ベースデバイスプロファイルに含まれるn次元ルックアップテーブル変換から直接抽出することができる。また、測定ベースCMSにより、変換ベースカラープロファイルを生成する方法と装置が提供される。測定ベースCMSは変換ベースプロファイルを生成し、測定ベース色システムは色データと手続により媒介される。CMSは、測定プロファイルからロードした基準PCSを使用して、生成処理のユーザ設定を可能にする。基準PCSは、最終的なカラー出力装置に適切な色域を含むように設定される。さらに、生成処理において使用される色域マッピングモデル(GMM)は、デバイスモデル(DM)と同様、ユーザが選択可能である。DMは、プラグ接続が可能なモジュールとして供給されてもよい。CMSは、ICCインテントからPCSプロファイルとDMへの、ユーザが選択可能なマッピングを特徴とする。CMSの特徴は、アプリケーション、スタンドアロンのプロファイリングツール、OSのユーティリティにおいて使用される。  (もっと読む)
(もっと読む)
黒チャネルを含むデスティネーション空間への変換
三つの色管理が提示される。第一の色管理において、CMY値は、それぞれK値に関連付けられた複数のCMY→カラーアピアランス空間(CAS)のルックアップテーブルから補間される。複数のCMYルックアップテーブルの一つが、目標色値の明度値と無彩色度に基づき選択される。次に、CMY値は、選択されたルックアップテーブルと目標色値から補間され、関連するK値を有する変換されたCMYKを形成する。第二の色管理において、黒色重みが取得され(S1202)、CASに変換された色と黒色重みに基づき、デスティネーション値を計算する。ソースデバイス色空間(SDCS)が黒色チャネルを含まない場合、黒色重みは色純度から取得される(S1207)。SDCSがKチャネルを含む場合、黒色重みはKチャネルから取得される(S1206)。第三の色管理において、黒色重みは、ソースモジュールから入手可能な場合はソースモジュールから取得され、ソースモジュールから入手不可能な場合はCASの色の無彩色度と彩度に基づき計算される。  (もっと読む)
(もっと読む)
多原色表示装置に対する色変換方式
【課題】多原色カラー表示装置において、線形計画法を利用して多原色値を一元的に決定することができる色変換方式を提供する。
【解決手段】Xorg ,Yorg ,Zorg を入力三刺激値、xw ,yw を画像中の白色点のxy色度値とし、かつX,Y,ZをXorg ,Yorg ,Zorg と、Xw ,Yorg ,Zw の2点を通る直線上にあるとする。この直線に沿って、輝度一定で色度を下げるマッピングを行う。もともと色域が広い表示装置では、それほど複雑なマッピングは必要ないため、このような線形マッピングでも問題ない。目的関数zをXorg とXの差の絶対値として与え、特定の表示式にしたがって、これを最小化することで最適なマッピングを行うことができる。色域内の場合zの値は0となる。
(もっと読む)
画像処理装置およびその方法
【課題】 撮影条件に適したプロファイルを選択できるようにすることを目的とする。
【解決手段】 複数の撮影条件に夫々対応した複数のプロファイルを格納する格納手段と、所望の画像を得た時の撮影条件を入力する入力手段と、前記撮影条件に適したプロファイルを前記格納されている複数のプロファイルの中から選択する選択手段と、前記所望の画像を示す画像データと前記選択されたプロファイルを対応させて転送する転送手段とを有する。
(もっと読む)
強化された監視被写体撮像
撮像システム(30)が、被写体位置(46)における被写体(32)に向けてミリ波電磁放射線を送信し、その被写体(32)からミリ波電磁放射線を受信するように構成されたアンテナ装置(48)を含む。コントローラ(62)は、アンテナ装置(48)を操作し、受信された放射線を表す出力(68)を生成するように構成されたトランシーバ(64)と、トランシーバ出力(68)から、被写体(32)の画像(130)を表す画像データを生成するように適合されたプロセッサ(70)とを含む。アンテナ装置(48)によって受信された放射線を表す画像信号の少なくとも第1の部分を使用して、被写体(32)の少なくとも一部分の第1の画像(130)を表す第1の画像データが生成される。第1の画像(130)の解像度とは異なる解像度を有する第2の画像(132)を表す第2の画像データが、画像信号の少なくとも第2の部分から生成される。 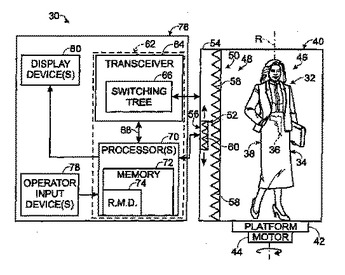 (もっと読む)
(もっと読む)
車両用右左折支援装置
【課題】 交差点ごとにインフラ整備を行うことなく、車両に搭載したシステムのみにより右折先または左折先横断歩道上の歩行者との接触を防止する。
【解決手段】 撮像手段による撮像画像を処理して右折先の横断歩道を横断する歩行者の存在を検出するとともに、すれ違う対面車両の通過を待っている右折待ちの状態にあるか否かを判定し、車両が右折待ち状態にあると判定され、かつ歩行者が検出されている場合に、運転者の車両を発進させる意志が検出されたときは警告を行う。
(もっと読む)
撮像素子および撮像装置のシェーディング処理装置、およびシェーディング処理方法
【課題】 より人の視覚特性に合致した精度の高いシェーディング検査および補正を可能とする。
【解決手段】 画像データ内に設定された所定の測定領域の画像データの変化率を検出する第1の検出手段と、前記第1の検出手段で検出した変化率が所定値よりも大きいと判定された場合には、前記測定領域を複数の領域に分割して、分割された複数の測定領域ごとに前記画像データの変化率を検出する第2の検出手段と、前記第1、第2の検出手段から検出された検出結果を基に、シェーディング補正値を求める演算手段とを有することを特徴とするシェーディング処理装置を提供する。
(もっと読む)
データ値をダウンサンプリングする方法
本発明は、データ値をダウンサンプリングする方法に関し、元の現行データ値と、この現行データを空間的に囲む元のデータ値とを備える第1のデータ値群を判定する工程と、この第1の群に基づいて、この第1の群の元のデータ値を、上記現行データ値と、上記元のデータ値との間の差が閾値よりも大きい場合にクリッピングすることにより、第2のデータ値群を作成する工程と、現行データ値を第2のデータ値群に基づいて低域通過フィルタリングする工程とを備える。本発明は、例えば、ビデオ符号器装置、ビデオ復号器装置、又はポータブル装置(携帯情報端末や携帯電話機など)に用いることができ、前述の装置は、ピクチャを符号化し、復号化し、より低い空間分解能でピクチャを記憶又は表示するよう構成される。 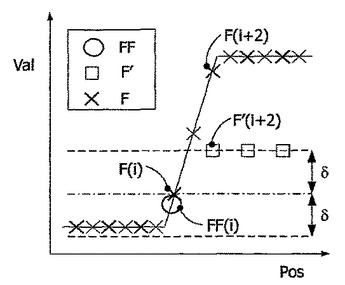 (もっと読む)
(もっと読む)
ボリューム画像のパノラマビュー画像の作成システムおよび方法
対象のボリューム画像のパノラマ投影を作成するためのシステムおよび方法が開示されている。仮想カメラが当該対象内の立方体空間の中心に配置される。このカメラから取得された画像が単一平面上に投影される。前方の画像が、平面の中心にあるウインドウ内にマッピングされる。立方体空間の左方、右方、上方および下方の画像が、この矩形ウインドウの周囲に、左方、右方、上方および下方の画像が矩形ウインドウを取り囲む連続画像を形成するようにマッピングされる。  (もっと読む)
(もっと読む)
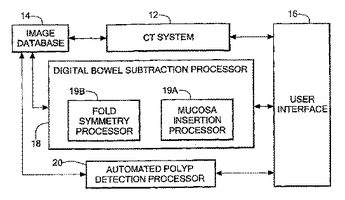
腸控除システムにおける画像処理のための方法および装置
結腸の画像における腸のひだを処理するためのシステムおよび方法が記載される。結腸の画像中で腸の中心線を見出すための方法およびポリープを検出するための方法も記載される。
 (もっと読む)
(もっと読む)
3,181 - 3,200 / 3,330
[ Back to top ]