
Fターム[5B057CC01]の内容
Fターム[5B057CC01]の下位に属するFターム
局所領域処理を全体に施すもの (2,089)
Fターム[5B057CC01]に分類される特許
3,221 - 3,240 / 3,330
複数のアニメーションシステムを同期させる通信プロトコル
上位アニメーションシステムと下位アニメーションシステムの間でのデータの非同期交換を司る通信プロトコルを記載する。上位アニメーションシステムは、可変中波フレームレートを有し、対話性向けに最適化される。下位アニメーションシステムは、一定の高周波フレームレートを有し、高リフレッシュフレームレート向けに最適化される。通信プロトコルは、上位アニメーションシステムによって、下位アニメーションシステムに送ることができる、アニメーションを指定し、アニメーションが、指示された期間に渡ってどのように変化することになるかを指定するためのメッセージを含む。その結果、上位システムからすべてのフレームに対してアニメーションデータが受信されなくても、下位システムは、高リフレッシュレートでアニメーションを表示することができる。 (もっと読む)
印刷用色変換プロファイルの生成

【課題】
【解決手段】 分光プリンティングモデルコンバータを用いて、サンプルインク量データを、そのサンプルインク量データによって表されるインク量で印刷されるべきサンプルパッチの分光反射率に変換する。それぞれ複数のインクのインク量セットを表す複数のサンプルインク量データが準備され、各サンプルインク量データが、分光プリンティングモデルコンバータを用いて、サンプルインク量データによって表されるインク量で印刷されるべきサンプルパッチの分光反射率に変換される。各サンプルインク量データに関して評価指数が算出され、この評価指数はサンプルインク量データに従って印刷されるべきサンプルパッチの色差指数と画質指数とを含んでいる。色差指数は、分光反射率から算出されるサンプル色と比較の基礎として選択された比較色との間の色差を表す。この評価指数に基づいて、複数のサンプルインク量データが選択され、選択された複数のサンプルインク量データに基づいて、測色値とインク量データとの対応関係を規定するプロファイルが作成される。
(もっと読む)
蛍光発光する隠れ証印
第1部分と第2部分とを含む印刷した証印が記述される。第1部分は、通常の昼光下で第1カラーを有する第1インクを有する。第2部分は、異なる第2インクを有する。第2インクは、通常の昼光下で第1カラーと実質的に同じ第2カラーを有する蛍光インクを含む。蛍光インクは、蛍光励起放射に晒されると、蛍光発光する。第2部分は、第1部分に埋め込まれ、第1、第2部分は、通常の昼光下で実質的に相互に視覚的に識別することができない。 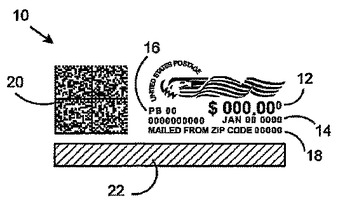 (もっと読む)
(もっと読む)
性能と柔軟性を動的に均衡させることができるカラーマネジメントシステム

【課題】 コンピュータシステムプラットフォームが、コンテンツワークフロー内で介入し、コンテンツの状態および任意の適切なカラーマネジメントポリシーに基づいて追加のカラーマネジメントを実施することができる方法およびシステムを提供すること。
【解決手段】 送信元からのプロファイルデータは、チョークポイントにおいてプラットフォームに入力された後で中間色空間に変換される。現在のカラーコンテンツ、プロファイルデータ、および/またはプラットフォームのポリシー制御に応答して、カラーマネジメント入力を管理して、即座にカラーマネジメントデータを変更し、または後でカラーマネジメントデータを変更し、またはカラーマネジメントデータを無視し、あるいはそれらの組合せを行うことができる。
(もっと読む)
画像歪み補正プログラム,画像歪み補正装置,画像歪み補正方法並びに画像歪み補正プログラムを格納した記録媒体
画像撮像装置により紙面を撮像した画像から、紙面内容を手がかりとして、紙面曲面上で互いに平行であった測地線の射影集合を抽出すると共に、測地線の射影集合から紙面曲面に該当する線織面を形成する線織線の射影集合を抽出する。そして、測地線及び線織線の射影集合から紙面曲面を推定し、その紙面曲面に基づいて画像の歪みを補正する。このようにすれば、多様な歪みの種類に対応可能となると共に、画像に紙面の一部しか表れていないときであっても歪み補正を行うことができる。 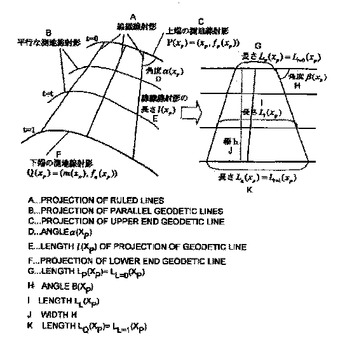 (もっと読む)
(もっと読む)
3D自動測量装置
360度全周囲カメラで得られる動画映像を解析して、画像内の任意の対象物について高精度な三次元計測を行う。所望の計測点と座標が既知の基準点を含む動画像を撮影する周囲画像撮影部101と、撮影画像を記録する画像記録部102と、画像内の映像的な特徴点を抽出する特徴点抽出部103と、画像内の計測点を自動抽出する計測点特定部104と、画像内の基準点を自動抽出する基準点特定部105と、計測点,基準点,特徴点を各フレーム画像内で対
応付ける対応点追跡部106と、対応付けられた計測点,基準点,特徴点の三次元相対座標を演算するベクトル演算部107と、上記演算を繰り返して三次元相対座標を統計処理する誤差最小化処理部108と、基準点の既知座標により三次元相対座標を絶対座標系に変換する絶対座標取得部109と、最終座標を記録する計測データ記録部110と、記録された計測データを表示する表示部111とを備える。
(もっと読む)
監視装置
監視装置は、カメラ(101)で撮影された全体画像をフレーム毎に受けて全体画像に対してフレーム間差分処理、又は事前に用意された背景画像との背景差分処理を行う移動体画像生成部(102)と、差分処理された画像(移動体画像)を1次元情報に変換し、周波数分析を行って、移動物体または群衆の密集の度合いを示す密集度を算出する密集度算出部(103)と、所定日時の密集度に基づいて移動物体又は群衆の基準密集度(モデル値)を算出するモデル生成部(104)と、現時刻における密集度と基準密集度との比較を行って、現時刻における密集度が基準密集度と異なるか否かを判断して判断結果を生成して報知部(107)に与える状況判断部(106)とを備える。  (もっと読む)
(もっと読む)
自動顕微鏡スライド組織サンプルマッピング及び画像取得
この方法は、組織サンプルセットの画像を受け入れる工程(620)を備える。少なくとも1つの他の組織サンプルに対する各組織サンプルの画像中の位置は、電子的に識別される(640)。各組織サンプルは、組織サンプル位置の識別に基づいて電子的に識別される(660)。 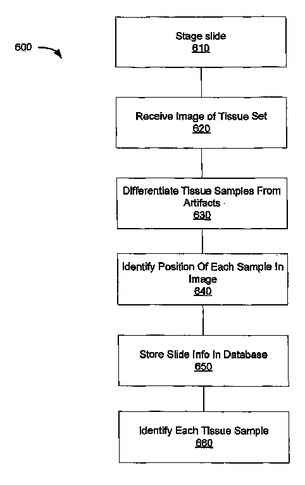 (もっと読む)
(もっと読む)
画像処理システム、画像処理方法、その記録媒体およびプログラム
【課題】 デジタルカメラの色再現特性を定める色処理パラメータを利用者の好みで自由に設定できる画像処理システム、画像処理方法、その記録媒体およびプログラムを提供する。
【解決手段】 画像処理手段202は、色票3に含まれる対象色(各色パッチの色)の部分の撮像データに対して色処理パラメータを用いてデジタルカメラ1と同様の画像処理を行うことで色データを得る。変更手段204は、得た色データを示す第1のマークと、対象色の色再現の目標色を示す第2のマークとを含む色平面を含み、その第2のマークの位置を利用者が変更可能であるマーク変更画面を表示手段208に表示する。パラメータ最適化手段205は、第2のマークで特定される目標色と、第1のマークで特定される色との色差が小さくなるように色処理パラメータの最適化を行う。データ入出力手段201は、最適化した色処理パラメータをデジタルカメラ1に送信する。
(もっと読む)
乗員検出システム
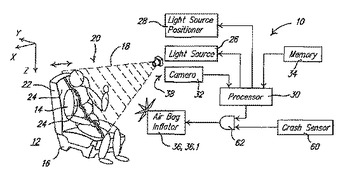
カメラ(32)は、光源ポジショナ(28)により配置された光カーテン(18)により物体上に投射された光ストライプ(22)の連続画像を取り込む。これから背景画像を差し引き(616)、得られた画像をビニング(618)により強調し、閾値アルゴリズム(620)により2値化し、細線化し(622)、補間し(624)、そして格納する(626)。補間画像は、複数の光ストライプ(22)について取り込む。プロセッサ(30)は、非ゼロカメラピクセルについて計算した直交座標から3D表面モデルを生成する(1604)。容量表示は、近接表面、例えば着座表面(24)のモデルに対する、物体表面のオフセットから決定する(1610)。物体は、例えば訓練可能パターン認識システムによって、3D表面モデルの3D形状デスクリプタ(1606)および容量表示(1610)またはその一部(1612)に応答して分類される(1614)。車両(12)内の乗員(14)の検出は、安全拘束システム(36)の制御に用いることができる。
 (もっと読む)
(もっと読む)
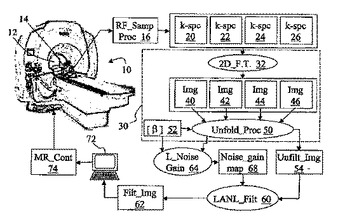
局所適応的な非線形ノイズ削減
撮像スキャナ(10)が撮像データを取得する。再構成プロセッサ(30)が撮像データを再構成してフィルタ処理前再構成画像にする。局所的ノイズマップ作成プロセッサ(64、120、136、140、142、152)が前記フィルタ処理前再構成画像における空間的変動のあるノイズ特性を表すノイズマップ(68、68′、68″)を生成する。局所適応的な非線形ノイズフィルタ(60)がノイズマップ(68、68′、68″)に従って前記フィルタ処理前再構成画像の異なる領域を異なる仕方でフィルタ処理してフィルタ処理済み再構成画像を生成する。
 (もっと読む)
(もっと読む)
高磁場磁気共鳴撮像のための適応的画像均一性補正
磁気共鳴撮像スキャナ(10)によって収集された磁気共鳴撮像データから補正済み再構成画像を生成する装置が、収集された磁気共鳴撮像データから補正済み再構成画像を再構成する再構成プロセッサ(44)を含む。パラメータ計算プロセッサ(52)が撮像対象の少なくとも一つの特性を決定する。補正パターン調整プロセッサ(54)が保存補正パターンの族から前記少なくとも一つの特性に基づいて補正パターンを選択する。画像補整プロセッサ(56)が前記未補正再構成画像を、前記選択された補正パターンを使って補正し、補正済み再構成画像を生成する。 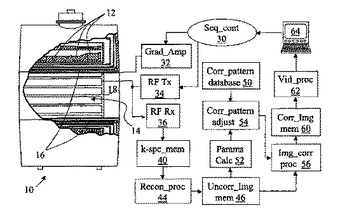 (もっと読む)
(もっと読む)
組み込みアプリケーションに適した、画像における赤目の検出と補正を行うシステム及び方法
画像における赤目の検出及び補正を行うシステム(10)及び方法が説明される。一態様では、入力画像(12)がサブサンプリングされて、サムネイル画像(44)が生成され、このサムネイル画像(44)において、赤目ピクセルエリア(18)が検出される。別の態様では、当初の色値を備えたピクセルのラインを有する入力画像(12)が処理される。入力画像(12)の各エリアに対応する1つ又は複数の赤目ピクセルエリアが検出される。検出された赤目ピクセルエリアに対応する入力画像(12)の各ピクセルは、隣接するライン(262)のピクセルに関係なくライン(260)ごとに赤目ピクセル又は非赤目ピクセルとして分類される。赤目ピクセルとして分類された入力画像(12)のピクセルの当初の色値は補正される。 (もっと読む)
マルチプロセッサ・グラフィックス処理システムの適応型負荷分散
フレームの異なる部分をレンダリングする複数のグラフィックス・プロセッサ間に負荷を分散させるためのシステムと方法。表示領域は、2つ(またはそれ以上)のグラフィックス・プロセッサのそれぞれに対する複数の部分に分割される。グラフィックス・プロセッサは、フレームのそれぞれの部分をレンダリングし、レンダリングの完了を示すフィードバック・データを返す。フィードバック・データに基づき、グラフィックス・プロセッサの2つのそれぞれの負荷の間の不均衡を検出することができる。不均衡が存在する場合、表示領域は再分割され、負荷のあまり重くない方のプロセッサに割り当てられる部分のサイズを増やし、負荷の重い方のプロセッサに割り当てられる部分のサイズを減らす。 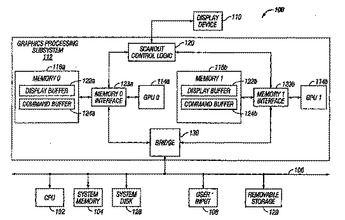 (もっと読む)
(もっと読む)
顕微鏡を用いて結像された位置の座標を装置非依存的に決定する方法およびシステム
本発明は、顕微鏡により表示された位置(P)の座標を装置非依存的に決定する方法および装置に関するものであり、最初に、DICOM座標系内の少なくとも1個の基準位置の所与の対物レンズに関連付けられた基準座標(X1、Y1、Z1)に対応する装置依存座標系において、表示された基準位置(E1)について装置座標(x1、y1、z1)と、装置依存座標(x、y、z)をDICOM座標系の座標(X、Y、Z)へ変換するための変換規則(Φ)とが決定される。最後に、装置非依存座標決定を完了すべく、決定された変換規則(Φ)により、表示された位置(P)の装置座標(xp、yp、zp)がDICOM座標系の装置非依存座標(Xp、Yp、Zp)に変換される。  (もっと読む)
(もっと読む)
有界三次元対象物の分類と空間ローカライゼーションのためのコンピュータ視覚システム
本発明は、有界三次元対象物の認識、分類、および空間ローカライゼーションのためのシステムと方法に関する。特には、対象物の認識、分類、およびローカライゼーションのためのコンピュータ化された方法に関する。本方法は、カメラにより記録された、または対象物のCAD表現を使用して構築された多数のトレーニング図に基づいて、トレーニングデータベースを生成することを含む。特徴的曲線は、トレーニング図から導出され、曲線のプリミティブが検出される。フィーチャの本質的および非本質的記述子が、対象物のクラスおよび図の姿勢状態に関するデータと共にデータベースに格納される。最終的には、認識は二段階で行われる。最初は、認識図の本質的記述子がデータベースの記述子と比較される。二番目に、最良の整合フィーチャから、どのフィーチャが、同じ姿勢状態にある同じ対象物クラスであることを示唆するという意味で、相互に一致するかが調べられる。 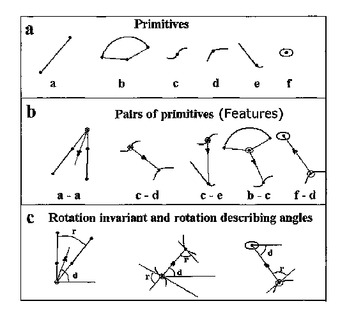 (もっと読む)
(もっと読む)
色変換マトリクス算出方法および色補正方法
【課題】色相に関して再現色を本来の色に高精度に近似できる色変換マトリクスを得る。
【解決手段】カラーチャートを撮影して複数のカラーパッチに対応する入力色CinのRGB信号を求めるとともに、各カラーパッチの測色値から目標色CmeのRGB信号を求める。この入力色Cinが目標色Cmeに対して色相が一致するような色相最適化マトリクスA−huewと、彩度が一致するような彩度最適化マトリクスA−satwとを求め、両者の積を色変換マトリクスAに定める。入力色Cinに色変換マトリクスAを作用させて補正色Cesを得、補正色Cesおよび目標色Cmeの色相角差(θme−θes)を求め、全カラーパッチの色相角差の2乗和が許容値を超えなければ、色変換マトリクスAを有効であると認定する。
(もっと読む)
色変換マトリクス算出方法および色補正方法
【課題】色相に関して再現色を本来の色に高精度に近似できる色変換マトリクスを得る。
【解決手段】カラーチャートを撮影して複数のカラーパッチに対応する入力色CinのRGB信号を求めるとともに、各カラーパッチの測色値から目標色CmeのRGB信号を求める。この入力色Cinが目標色Cmeに対して色相および彩度が一致するような色変換マトリクスMを減衰最小自乗法により求める。入力色Cinに色変換マトリクスMを作用させて補正色Cesを得、補正色Cesおよび目標色Cmeの色相角差(θme−θes)を求め、全カラーパッチの色相角差の2乗和θrmsが許容誤差以下であれば、色変換マトリクスMを有効であると認定する。
(もっと読む)
入力装置から出力装置へのプリンタプロファイルのマッピング
【課題】入力装置から出力装置へのプリンタプロファイルのマッピング。
【解決手段】どこでモニタ装置がマッピングを行うかを予想し、その場所での所望のプリンタ装置の配置を予想することによって、色域の外側で印刷するための方法。入力(A2Bx)プロファイルを予想するプリンタ(B2Ax)プロファイルにおける関係が確立されるとともに、最適な方法でマッピングがもたらされる。マッピングは、色域の外側にある色のためのマッピングを含む出力ICCプロファイル(B2Ax)マッピングを作成するために用いられる。第1に、最も重要な色マッピング(RGBCMYなど)が確立され、これらのマッピングは次いで、ICC出力変換の色域特性の外側を決定するために用いられる。色域の内側の変換は、標準的なレンダリングと同じままに残る。
(もっと読む)
信号処理装置、信号処理プログラム、および電子カメラ
【課題】本発明は、色変換処理を画素ごとに変更するに際して、ノイズの影響を受けにくくすることを目的とする。
【解決手段】本発明は、色変換処理を実施する色変換部と、その色変換の係数群に適正係数群を設定する係数適正化部とを備える。この係数適正化部は、処理対象の画素を含むように局所域を設定し、局所域の画素信号に基づいて、平均色情報、平均輝度情報、および平坦度の少なくとも一つを含む『局所域の特徴情報』を算出する。係数適正化部は、この局所域の特徴情報に基づいて、処理対象の画素に使用する適正係数群を決定する。
(もっと読む)
3,221 - 3,240 / 3,330
[ Back to top ]