
Fターム[5B057DB08]の内容
画像処理 (340,757) | 分析部 分析画像の特性 (30,351) | 2値 (485)
Fターム[5B057DB08]に分類される特許
101 - 120 / 485
画像処理方法、画像処理装置、プログラム及び画像処理システム
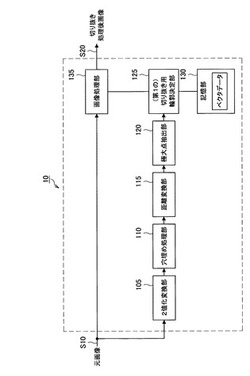
【課題】画像の輪郭を幾何学な輪郭に整形する。
【解決手段】元画像から所定の基準に基づき選択された画像領域を画像の切り抜き対象側の白画素領域とバックグラウンド側の黒画素領域とに2値化する2値化変換部105と、白画素領域に囲まれた黒画素を白画素の数値に変換して白画素領域の穴を埋める穴埋め処理部110と、穴埋め後の各白画素から黒画素領域までの距離値を求める距離変換部115と、各白画素の距離値に応じて白画素領域の骨格を示す複数の点を抽出する骨格抽出部と、抽出された複数の点のうち所定の条件に基づいて重要度が低いと判断される点を省きながら、省かれなかった点の位置を中心として点毎の画素の距離値に応じた楕円又は真円を描画し、描画した複数の楕円又は真円の外縁を切り抜き対象画像を切り抜くための輪郭として決定する切り抜き用輪郭決定部125とを備える画像処理装置10を提供する。
(もっと読む)
指紋画像取得装置、指紋認証装置、指紋画像取得方法及び指紋認証方法

【課題】指紋画像を用いた指紋認証に関し、複数の指紋画像を統合した指紋画像を用いて特徴量の抽出性能を高める。指紋画像を高解像度化することにより、指紋認証の認証精度を高める。
【解決手段】指紋センサ(スウィープ型指紋センサ14、平面型指紋センサ42)で得られる指紋画像から抽出できる特徴量を用いることにより、指紋画像の領域毎に高解像度化が可能か否かを判定し、高解像度化の可能な領域について高解像度化処理を行うことにより解像度を高め、指紋画像に存在する特徴量を抽出している。また、高解像度化処理により解像度が高められた指紋画像から特徴量を抽出し、その特徴量を用いて指紋認証を行っている。
(もっと読む)
車両周辺監視装置
【課題】対象物が四足動物であるか否かを高精度に認識することができる車両周辺監視装置を提供する。
【解決手段】本発明の車両周辺監視装置によれば、撮像画像から対象物領域として抽出された対象物が存在する領域から、第1の要素領域群および第2の要素領域群が異なる時刻において抽出されることとを要件として、当該対象物が四足動物に該当すると判定される。歩行している四足動物を横から見た場合、前脚および後脚が開いている第1の姿勢、ならびに、前脚および後脚のいずれか一方が閉じている第2の姿勢が異なる時刻で確認されることに鑑みて、前記のような判定手法により対象物が四足動物であるか否かが高精度に認識されうる。
(もっと読む)
画像処理コントローラ、及び画像処理装置
【課題】画像データの特徴に応じて適切な画像処理を自動で施すことができ、かつ、処理負荷が少ない画像処理を施す。
【解決手段】画像データを記憶する第1の手段と、記憶された画像データにエッジ強調処理と平滑化処理を施す第2の手段と、元画像の1ページを示す画像データにおけるエッジ画素数をカウントする第3の手段と、カウントされたエッジ画素数が所定の閾値以上の場合は、元画像が文字を多く含む画像であると判断し、エッジ画素数が所定の閾値未満である場合は、元画像が写真画像を多く含む画像であると判断し、この判断結果に基づいて第2の手段が実行するエッジ強調処理と平滑化処理の設定を行う第4の手段とを有する。
(もっと読む)
画像処理装置
【課題】環境適合印を含む画像情報を印刷記録媒体に印刷するにあたって、当該画像情報の印刷で指定された印刷条件が、環境適合印の要件に適合しない場合に、環境適合印を含む画像情報がそのまま印刷されることを回避することができる仕組みを提供する。
【解決手段】本発明の画像処理装置1は、印刷記録媒体に印刷される画像情報を入力する画像入力部2と、画像情報の印刷で指定された印刷条件が、画像入力部2によって入力される画像情報に含まれる環境適合印の要件に適合しない場合に、環境適合印の印刷を禁止するように制御する制御部7とを備える。
(もっと読む)
接触点算出方法およびプログラム
【課題】処理速度の向上と精度の維持との両立を図った接触点算出方法を提供すること。
【解決手段】座標に標高を対応づけた地形データ13bをメッシュ状の区域に区分したのち、区域ごとに標高データの最大値nを代表値として抽出することで高度データを均一化し、間引きする。シミュレータ100で得られた飛しょう体の経路が通過する区域において、飛しょう体の高度データの最小値mを代表値として抽出して経路データを間引きする。間引きされたこれらのデータを用いて、高度データの最小値mが標高データの最大値n以下の区域を処理対象区域として判別する。そして、この処理対象区域について、接触判定アルゴリズムを用いて接触判定を行い、接触地点の座標を算出する。
(もっと読む)
物体の3D形状を求める装置および方法
【課題】シーン内の物体から取得される単一画像から視体積交差領域を生成し、3D形状を求める装置および方法を提供する。
【解決手段】物体101は、照明され、複数のシルエットが、マスクと同一平面状にあるとともに、当該マスクに密に近接している拡散スクリーン上に投じられる。このような拡散スクリーンから取得される単一画像は、シルエットに従って、複数のサブビューに分割される。次いで、二値画像の等値面に従って、物体の視体積交差領域が構築され、物体の3D形状103が近似されることとなる。
(もっと読む)
解像度変換方法
【課題】ドットマトリクス形式の二値画像を高解像度化した際に、整数倍、非整数倍の拡大を問わず、画像全体においてムラなく、平滑な斜めエッジを得ることができ、かつ細線を元の太さに対応する太さで安定に再現できる解像度変換方法を提供する。
【解決手段】入力画像の画素間の任意の位置の濃度をその位置の入力画像における近傍画素の補間値で表すとして、入力画像と解像度変換後の出力画像とを重ね合わせ、出力画像の各画素について、その画素に対する出力画素領域を割り当て、かつ該出力画素領域と重なる入力画像の領域について補間値を積分してリサンプリングした値を閾値と比較して二値化する。この際、出力画素領域が複数の入力画素領域に跨る場合は、1つの入力画素領域の中心に近づけるようにその出力画素領域を移動させてから積分する。
(もっと読む)
線画処理装置、線画処理方法およびプログラム
【課題】線画から網点部分を容易かつ精密に分離する技術を提供する。
【解決手段】線画処理装置100は、描画領域DRの輪郭部分に沿って輪郭部分を構成する画素の曲率値を順次決定し、輪郭部分における各画素位置の曲がり度合いを定量化する。そして、線画処理装置100は、所定の基準値との比較に基づき、描画領域DRを拡張させる方向に曲がる画素(変曲点P)を検出し、さらに、所定の位置関係にある変曲点P間を分離線Lで結ぶことによって、描画線DLから突出する突出領域ERを描画領域DRから分離する。そして、線画処理装置100は、所定の基準面積以下の描画画素集合を除去することによって、分離した突出領域ERを画像から除去する。
(もっと読む)
タイヤ形状検査方法,タイヤ形状検査装置
【課題】凹凸のある表示マークが形成されたタイヤのサイドウォール面の形状欠陥を検査する際に,表面高さ測定値から表示マークが形成された範囲の測定値を確実にかつ誤認することなく除去して正しい形状欠陥測定を行うことができること。
【解決手段】サイドウォール面の表面高さ分布情報に対して2次元のソーベルフィルタ処理を施し,得られた勾配値分布情報を2値化した2値分布情報に膨張処理を施して得られる2値分布情報に対してラベリング処理を施し,ラベル値ごとのフィレ座標に基づいて表示マークの存在範囲を含むマスク範囲の座標を設定し,そのマスク範囲内の表面高さ測定値をそのマスク範囲外の表面高さ測定値による補間値に置き換え,これにより得られた表面高さ分布情報に基づき形状欠陥検査処理を実行する。
(もっと読む)
車両周辺監視装置
【課題】対象物が四足動物に該当するか否かの認識精度の向上を図ることができる装置を提供する。
【解決手段】本発明の車両周辺監視装置によれば、抽出対象物、すなわち、撮像画像から抽出された対象物に、上端部から下端部に向かって間隔が広がる一対の第1線分からなる特定部分が2つ存在するか否かに応じてこの対象物が四足動物に該当するか否かが判定される。歩行中の四足動物を横から見た場合、前後それぞれの左右一対の脚部が上端部から下端部に向かって間隔が広がる姿勢となることに鑑みて、各特定部分は歩行中の四足動物の前または後の左右一対の脚部に該当する可能性が高いため、この判定手法により対象物が四足動物に該当するか否かの認識精度の向上を図ることができる。
(もっと読む)
画像認識装置、画像読取装置及び画像認識装置の画像認識方法
【課題】演算が速くしかも判定精度が高い画像認識装置を提供する。
【解決手段】ブロック値と第1の閾値と比較して第1の特徴量を出力する第1の特徴抽出部と、ブロック値と第2の閾値とを比較して第2の特徴量を出力する第2の特徴抽出部と、第1の特徴量と辞書パターンとを照合し、第2の特徴量と辞書パターンとを照合し、いずれかの特徴量が辞書パターンと一致したときに判定信号を出力するパターン照合判定部を備える。また、処理パターンを重複しないように分割し、さらに重複するように再分割して処理パターンごとに特徴量を算出する特徴抽出部と、認識する特定のパターンである辞書パターンを格納する辞書ファイルと、特徴量と辞書パターンとを照合して判定信号を出力するパターン照合判定部を備える。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラムを記録した媒体
【課題】 現実の画像データに対応した最も好適な変換式を自動的に適用するということはできなかった。
【解決手段】 ステップS102で間引きするなどしながら画像データの画素について輝度yを求めた後、上端と下端において所定の分布割合だけ内側に入った端部を当該輝度分布の端部をみなすことにより(ステップS116)、輝度の再現可能な範囲内での拡大率に対応するパラメータaと、オフセット量に対応するパラメータbとを得ることができるようになるため、変換元の輝度yに対して変換先輝度YをY=ay+bなる関係式などを利用して自動的に変換可能となる。
(もっと読む)
アウトライン化方法およびそれを用いた画像圧縮方法、アウトライン化装置、ならびにアウトライン化プログラム
【課題】画像処理装置において、曲線を滑らかに表現するとともに、直線で表現すべきところは直線で表現できる、アウトライン画像を生成する。
【解決手段】直線ベクトルKLについては、連結する直線ベクトルLMとのなす角が110°を超えており、その長さが設定値を超え、また、直線ベクトルJKと直線ベクトルKLのなす角が90°以下である。これにより、直線ベクトルKLについては、「×」で示される直線ベクトルKLの中点ではなく、当該中点よりも、最初になす角を判断された直線ベクトルLMと連結する側に寄った位置(点PX)に、制御点を設定される。
(もっと読む)
ベクタ画像生成方法、画像処理装置、およびコンピュータプログラム
【課題】傾きのある文字を含むラスタ形式の画像をベクタ形式に変換する処理を、従来よりも、文字の形状をきれいに保ちつつ高速に行えるようにする。
【解決手段】画像に含まれる文字の傾きを求め、その文字の輪郭を形成する頂点画素を求め、その文字の輪郭のうちの一本の線分で表されるべき部分において同じ線分上に位置すべき同一線分画素群の候補である同一線分候補画素群を求め(#101)、その同一線分候補画素群のうちから、同一線分画素群を、求めた傾きに基づいて抽出し(#104)、抽出した同一線分画素群において両端に位置する両端画素を求め、求めた両端画素を結ぶ線分によってその両端画素に係る部分の文字の輪郭を近似し(#106)、近似した以外の部分を同一線分画素群の頂点画素以外の頂点画素を用いてアウトライン化することによって直線または曲線で近似する。
(もっと読む)
画像形成装置
【課題】ドット扁平による画像の再現性の低下を抑制可能な画像形成装置を提供する。
【解決手段】線幅検出部18は、パターン検出部16からの入力画像データに基づいて、線幅検出パターンの主走査方向の線幅および副走査方向の線幅をそれぞれ検出する。線幅調整部20は、主走査方向の線幅および副走査方向の線幅に基づいて、主走査方向と副走査方向との間の扁平率(扁平の度合い)を算出し、いずれかの方向にドット扁平が生じているか否かを判断する。誤差拡散部12は、誤差拡散処理に用いる分配パターンを変更し、ドット扁平が補正されるように、入力画像データを補正する。
(もっと読む)
画像処理装置および画像処理方法
【課題】従来、文書画像の傾き検出には文字ごとの特性を用いていたため、文字の大きさやコピー時等に生じた文字上のノイズの影響により、傾きの検出精度が低下する場合があった。
【解決手段】文書領域を含んだ文書画像データIに対し、縮小処理を施すことによって文書領域を抽出した文書縮小画像Isを生成する。そして文書縮小画像Isに対するフィルタ処理によって文書領域のエッジを抽出したエッジ画像Ieを生成する。そして、エッジ画像Ieにおけるエッジに接する直線をハフ変換により検出し、該直線の傾きにより文書画像の傾きを決定する。これにより、文書領域の特性に基づいた、精度の良い傾き検出を行うことができる。
(もっと読む)
顔検出システム
【課題】外部の光変化による前方注視怠慢状態の検出性能が低下することを防止するための顔検出システムを提供する。
【解決手段】運転者の顔の右側に向かって赤外線を照射する第1照明部と、運転者の顔の左側に向かって赤外線を照射する第2照明部と、前記第1照明部および前記第2照明部から赤外線が照射された運転者の顔をそれぞれ撮影する画像撮影部と、前記画像撮影部から顔の左右画像を獲得し、獲得された左右画像の差画像を獲得して運転者の前方注視怠慢状態を判断する制御部とを含んでなることを特徴とする。
(もっと読む)
車両周辺監視装置
【課題】車両と対象物との接触可能性が高い状況にあることを、この対象物の種類に鑑みて適当なタイミングまたは頻度で通報することができる車両周辺監視装置を提供する。
【解決手段】本発明の車両周辺監視装置によれば、対象物が人間であると判定され、かつ、この対象物の実空間位置が第1の接触判定領域A1に含まれている場合、自車両10とこの対象物との接触可能性が高いことが通報される。一方、対象物が四足動物であると判定され、かつ、この対象物の実空間位置が第2の接触判定領域A2に含まれている場合、当該通報がなされる。ここで、第2の接触判定領域A2は、第1の接触判定領域A1との重なり領域と、第1の接触判定領域A1から少なくとも一部がはみ出した領域とを有している。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】画像処理装置において、コストアップを抑えつつ、複数の機能を実現できるようにする。
【解決手段】黒画素がBcnt個連続した領域と、白画素がWcnt個連続した領域が隣接している。原稿外消去モードでは、BcntとWcntについて、200というパラメータが設定される。これにより、Bcnt≧200かつWcnt≧200であれば、そのような黒画素と白画素と境界位置が、原稿内と原稿外の境界として扱われる。一方、罫線外消去モードでは、Bcntについては50というパラメータが、Wcntについては200というパラメータが、それぞれ設定される。これにより、Bcnt≧50かつWcnt≧200であれば、そのような黒画素と白画素と境界位置が、罫線と罫線内の境界として扱われる。
(もっと読む)
101 - 120 / 485
[ Back to top ]