
Fターム[5B057DC05]の内容
Fターム[5B057DC05]の下位に属するFターム
重心 (501)
始点、終点、屈曲点、分岐点 (396)
Fターム[5B057DC05]に分類される特許
341 - 360 / 1,510
画像計測装置及びプログラム

【課題】医用画像の計測を行う際の操作性を向上させるとともに、計測の精度を向上させる。
【解決手段】予め用意されている複数の基本計測機能(計測線の描画機能又は計測値の算出機能)の中から任意に選択された複数の基本計測機能及びその順序に基づいて計測手順情報を生成し、計測手順情報に基づいて計測線の描画又は計測値の算出を行う画像計測装置において、選択された複数の基本計測機能のうち少なくとも一つの基本計測機能の実行時に、当該基本計測機能の実行前に描画された計測線により特定される点を用いて、当該基本計測機能における計測線の描画又は計測値の算出を行う。
(もっと読む)
特定の対象物品の識別のためのX線断層撮影検査システム

本明細書が開示するX線走査システムは、対象物の断層撮影X線画像を規定する走査データを生成する非回転式X線走査装置と、プログラム命令を実行するプロセッサとを備え、実行するプロセッサは、走査データを解析して、断層撮影X線画像の少なくとも1つのパラメータを抽出し、プロセッサは、対象物が液体、鋭利な対象物、薬物、紙幣、核物質、シガレット、または小火器を含むかどうかを判定するように構成される。 (もっと読む)
皮膚領域抽出方法、皮膚領域抽出装置、および皮膚領域抽出プログラム
【課題】
画像から皮膚の領域を精密に抽出することができる皮膚領域抽出方法等を提供する。
【解決手段】
皮膚領域抽出方法において、画像から顔の特徴点を検出するとともに、特徴点の位置に基づいて人の皮膚と推定されるサンプル領域を決定する領域決定ステップS10と、サンプル領域内の各画素について、輝度の値に応じて複数の群のいずれかに区分し、画素の各色差ごとの出現頻度を表わす色差モデルを群ごとに求める色差モデル生成ステップS20と、画像内の関心領域内の画素のそれぞれについて、各画素ごとに、色差モデルのうち、画素の輝度に対応する群に属する色差モデルに基づいて各画素についての人の皮膚である確率を求めることにより、各画素の確率の集合からなる第1の2次元確率分布を求める第1の2次元確率分布生成ステップS30と、第1の2次元確率分布に基づいて前記画像内における皮膚の領域を抽出する皮膚領域抽出ステップS40とを有する。
(もっと読む)
情報抽出装置、情報抽出方法、情報抽出プログラム、及び記憶媒体
【課題】パターンの並びが歪んだ場合であっても、パターン一つひとつの位置を簡易かつ正確に特定して、埋め込まれた情報を抽出する。
【解決手段】読取制御部34が、複数種別のパターンを格子状に印刷することで情報が埋め込まれた印刷物の画像データを取得し、線分列算出部36が、画像データの中の略垂直方向のパターン列を線分で結んだ略垂直線分列を複数算出するとともに、略水平方向のパターン列を線分で結んだ略水平線分列を複数算出し、探索部38が、略垂直線分列と略水平線分列との組み合わせ毎に、当該略垂直線分列及び当該略水平線分列の中から、互いに交差する略垂直線分及び略水平線分を探索し、交点算出部40が、探索された略垂直線分と略水平線分との交点をパターンの位置として算出し、抽出部42が、算出された位置のパターンの種別を識別し、印刷物に埋め込まれた情報を抽出する。
(もっと読む)
ロボットシステムおよびロボットシステムの制御方法
【課題】ワークが撮像されたボケ画像からワークの位置を精度良く検出するロボットシステムを提供する。
【解決手段】ワークWに対して作業を実施するロボット10と、前記ワークWを載置するとともに規則性を有する反射光を放出するマーカー90を備えたステージ72と、前記マーカー90に対して光を照射する光照射部48と、前記ワークWと前記マーカー90とを撮像するカメラ20とを備え、前記カメラ20により撮像された動きボケを含む劣化画像から前記マーカー90のマーカー画像100を抽出して、前記マーカー画像100から点拡散関数を算出する点拡散関数算出部36と、算出した前記点拡散関数を用いて、前記劣化画像を画像変換することにより、前記劣化画像から劣化していない元画像を生成する画像生成部37と、生成された前記元画像から前記ワークWの位置を算出する位置算出部39とを有することを特徴とするロボットシステム5。
(もっと読む)
正射投影画像を作成するための画像処理方法、装置およびプログラム
【課題】 撮影による画像の取得から正射投影画像の作成までを簡易化し、正射投影画像を精度良く作成する画像処理方法、装置およびプログラムを提供する。
【解決手段】 本発明は、所定間隔で離れた二つの標点を持つ被写体が対象面上に配置された状態で対象面を撮影機器によって撮影した画像の情報、撮影条件に関する情報および撮影機器の光学特性に関する情報を取得する情報取得工程と、撮影条件に関する情報および撮影機器の光学特性に関する情報から射影変換式を定めた上で、被写体における二つの標点間の距離情報を考慮して射影変換式を決定する要素を調整し、調整された射影変換式に基づき、撮影画像を正射投影画像に変換する画像変換工程とを備える。
(もっと読む)
消失点推定装置、消失点推定方法及び消失点推定プログラム
【課題】天候変化に耐性のある消失点推定装置、消失点推定方法及び消失点推定プログラムを提供することを課題とする。
【解決手段】消失点推定部14が、時間微分をゼロとする停留点を特異点として計算する線形システム方程式に、速度ベクトル推定部13で推定された速度ベクトルを代入して、その線形システム方程式のパラメータを推定する推定式を導出し、導出した推定式を非線形システム方程式に適用して上記パラメータを求め、求めたパラメータを先の線形システム方程式に代入して計算された特異点を消失点として推定する。
(もっと読む)
大規模カメラネットワークの較正
本開示は、複数のノード(12)を含み、各ノードは、指向性を有するセンサ(18)と、通信モジュール(14)と、指向性を有するセンサ(18)から較正オブジェクト(20)のローカルな測定値を受信し、通信モジュール(14)を介して近傍ノード(12)から較正オブジェクト(20)の追加的な測定値を受信し、ローカルな及び追加的な測定値に応じて較正パラメータの初期集合を推定し、通信モジュール(14)を介して近傍ノード(12)から較正パラメータの追加的なセットを受信し、較正パラメータの追加的な集合に応じて較正パラメータの更新された集合を再帰的に推定するよう構成されたプロセッサ(16)とを有する、センサネットワーク(10)に関する。カメラノード(12)の大規模ネットワーク(10)を構成する更なるシステム及び方法が開示されている。 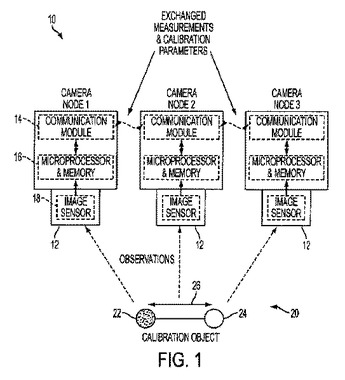 (もっと読む)
(もっと読む)
パターン認識システム及びパターン認識方法
【課題】上位カテゴリにおける物体の認識と下位カテゴリにおける特定物体の認識を、簡易な構成で実現することができるパターン認識システム及びパターン認識方法等を提供する。
【解決手段】パターン抽出部20は、画像取得部10により取得された画像データからパターン認識を行う部分画像を切り出す。特徴量算出部30は、パターン抽出部20により切り出された部分画像から所望の物体を認識するための特徴量を求める。尤度算出部40は、特徴量算出部30により求められた特徴量から認識対象である物体の尤度を求める。物体判別部50は、尤度算出部40により求められた物体の尤度からパターン抽出部20により切り出された部分画像が認識対象である物体かどうかを判別する。認識結果出力部60は、物体判別部50により認識された結果を出力する。
(もっと読む)
画像処理装置、画像処理方法、及び同方法をコンピュータに実行させるプログラム
【課題】対象物を撮像した入力対象画像中の対象物を隠蔽する隠蔽物の種類に関わらず隠蔽物の有無を検出可能とする。
【解決手段】対象物に関する基準対象画像と対象物を撮像した入力対象画像との間で局所的な特徴を比較して、入力対象画像中の対象物を隠蔽する隠蔽物を検出する場合に、基準対象画像上に複数のサンプル点を設定し、基準対象画像上に設定されたサンプル点に対応するサンプル点を入力対象画像上に設定し、基準対象画像上の各サンプル点における特徴量と入力対象画像上の各サンプル点における特徴量とを検出し、対応するサンプル点毎に基準対象画像及び入力対象画像の特徴量の類似度を算出して、類似度が所定の閾値未満であるサンプル点に基づいて、入力対象画像における隠蔽物の有無を判定する。
(もっと読む)
ステレオカメラシステムを用いて撮影された少なくとも二つの入力画像から深度情報を検出するための画像処理方法
本発明は、ステレオカメラシステム(10)を用いて撮影された少なくとも二つの入力画像(A1,A2)から深度情報を検出するための画像処理方法に関し、所定の演算子を用いて、前記入力画像(A1,A2)をサイン画像(B1,B2)に変換するステップと、少なくとも二つの前記入力画像(A1,A2)の内の少なくとも一つの入力画像に関する所定の視差レベルについての費用空間を求めるために、ノンパラメトリックな統計的な順位相関基準を用いて、前記サイン画像(B1,B2)に基づき費用を算出するステップ(C)と、前記所定の視差レベルに関する前記費用空間の各点についての対応分析を実行するステップ(D)と、事前に検出された前記視差(d)から視差マップを求めるステップを有する。  (もっと読む)
(もっと読む)
中間画像生成装置およびその動作制御方法
【課題】基準画像と対応画像との間の中間画像を生成する。
【解決手段】一定間隔で撮影された第1の画像70と第2の画像80とにおいて,移動する被写体像73と83とが検出される。移動被写体像73と83との中間位置に,中間画像90の移動被写体像93が位置決めされる。移動被写体像93以外の画像部分においては,第1の画像70が利用されて中間画像90が生成される。第2の画像80においては,移動被写体像83を除く部分は第1の画像70と一致するように補正される。
(もっと読む)
カメラ校正装置およびカメラ校正プログラム
【課題】視覚的に特徴的な点と、世界座標の既知な制御点とが、別々に与えられる場合にも、カメラパラメータの推定を可能とするカメラ校正装置を提供する。
【解決手段】カメラ校正装置1は、入力画像から制御点の画像座標と画像領域とを指定するランドマーク指定手段12と、画像領域から特徴点配置情報と画像特徴とを抽出する特徴抽出手段14と、制御点世界座標を入力する世界座標入力手段16と、特徴点配置情報と画像特徴と制御点世界座標とを記憶するランドマーク記憶手段18と、新たな入力画像から特徴点の配置情報と画像特徴とを抽出する特徴抽出手段22と、画像特徴の類似度の高いものを対応付ける照合手段24と、特徴点配置情報と配置情報と照合結果とから新たな入力画像の制御点画像座標を推定する制御点推定手段26と、制御点世界座標と推定された制御点画像座標とからカメラパラメータを推定するカメラパラメータ推定手段28と、を備える。
(もっと読む)
画像変形装置およびその動作制御方法
【目的】ぶれの無い位置あわせを行う。
【構成】連写により第1の画像と第2の画像とを得る。第1の画像と第2の画像との画像全体のぶれを検出し,そのぶれが補正される。第1の画像と第2の画像とに含まれている自動車の画像103は,第1の画像の撮影から第2の画像の撮影までの間に移動しているので,第2の画像において,第1の画像の位置に移動するように,自動車の画像103が動かされる。自動車の画像103の動かされた画像と,第1の画像の自動車の画像103とが重ね合わせられる。被写体が移動する動きのある部分と被写体が移動しないが手振れによりぶれる部分とに応じて2駒画像を重ねあわすことができる。
(もっと読む)
画像生成装置、画像生成方法及び画像生成プログラム
【課題】移流方程式を用いて次画像を生成する際に、処理の高速化と画像劣化の防止を図る。
【解決手段】位置計算部14により、現画像の輝度値と該輝度値に対応する流速成分とを用いて現画像の各輝度値が次時刻で移動する移動後の位置をそれぞれ計算し、画像生成部15により、現画像の各輝度値を移動後の位置にそれぞれ対応付けて次時刻の次画像を生成するので、偏微分方程式を陽に計算する必要がなく、次画像を高速にリアルタイム生成することが可能となる。また、補正部16により、次画像における勾配値と現画像における勾配値との差を最小とするように次画像を補正するため、画像輝度の崩れを防止し、画質の劣化を抑制することが可能となる。
(もっと読む)
画像データ生成装置
【課題】画像を見る運転者等に違和感を与えることなく、より多くの情報を運転者等に提供することが可能な画像データ生成装置を提供する
【解決手段】画像データ生成装置30Aは、車両に設けられた少なくとも一つのカメラ11〜15の撮像結果に関する撮像データを取得する撮像データ取得部31と、車両の画像に関する車両画像データが予め記憶される車両画像データ記憶部32と、記憶された車両画像データと、取得された撮像データと、に基づいて、車両の外部の仮想視点から見た当該車両を含む画像に関する画像データを生成する画像データ生成部33Aと、生成された画像データを表示装置へ出力する出力部34と、を備え、画像データ生成部33Aは、撮像データに基づいて、撮像結果が車両の画像内に合成されるように、画像データを生成する。
(もっと読む)
距離測定方法
【課題】ステレオ計測法において被測定物のある角部と撮影した画像における角部の像とを品質良く対応させる方法を提供する。
【解決手段】ワークと撮像装置との距離を測定する距離測定方法にかかわる。ワークの形状情報を用いて参照部を設定し、参照部を複数の方向から見た参照部画像を生成するステップS1の参照部設定工程と、ワークを複数の方向から撮像装置にて撮影し、複数の撮影画像を生成するステップS3の撮像工程と、参照部画像を用いて複数の撮影画像において参照部が撮影された参照部像の場所を検出するステップS4の参照部検出工程と、参照部像の場所の情報を用いてワークと撮像装置との距離を検出するステップS5の距離測定工程と、を有する。
(もっと読む)
医用画像処理装置、シェーマの作成方法及びプログラム
【課題】患者の個体差に対応したシェーマを提供する。
【解決手段】医用画像処理装置は、被写体の特徴を示す特徴点が設定された、被写体のシェーマのテンプレートを記憶する記憶手段と、医用画像を画像解析して、医用画像に含まれる被写体を認識し(ステップS2)、特徴点を設定する(ステップS3)制御手段と、を備え、前記制御手段は、前記テンプレートに設定された特徴点と、前記医用画像に設定された特徴点とが対応するように、前記テンプレートを修正し、シェーマを作成する(ステップS6)。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】顔画像クラスタリングにおける閾値設定の非容易性を緩和し、顔画像クラスタリング性能を向上させた画像処理装置を提供する。
【解決手段】画像処理装置1は、動画像データ中の連続した同一人物の顔画像を1つのシーケンスとして複数のシーケンスを作成するシーケンス作成部と、シーケンス毎に作成された複数の顔画像辞書内の各ペアの第1の類似度、及び各顔画像辞書と所定の複数の辞書の各ペアの第2の類似度を計算する類似度計算部と、計算して得られた複数の第1の類似度を前記第2の類似度により補正する類似度補正部と、前記類似度補正部において補正された前記複数の第1の類似度と所定の閾値とを比較して、前記複数の顔画像辞書をクラスタリングする顔クラスタリング部と、を有する。
(もっと読む)
ゲーム装置、ゲームシステム、ゲーム装置の制御方法、ならびに、プログラム
【課題】プレイヤーがボタンやスイッチ、レバーなどを操作しなくとも、注目位置を取得できるようにするのに好適なゲーム装置等を提供する。
【解決手段】ゲーム装置301において、表示部302は、プレイヤーに提示すべき情報を画面に表示し、撮影部303は、プレイヤーの顔を撮影して、その顔を含む画像を取得し、推定部304は、取得された画像においてプレイヤーの顔が含まれる位置を推定し、変換部305は、推定された位置を、画面内の位置に変換し、表示部302は、画面内の変換された位置に、プレイヤーの注目位置を表す画像を表示する。
(もっと読む)
341 - 360 / 1,510
[ Back to top ]