
Fターム[5B057DC05]の内容
Fターム[5B057DC05]の下位に属するFターム
重心 (501)
始点、終点、屈曲点、分岐点 (396)
Fターム[5B057DC05]に分類される特許
261 - 280 / 1,510
画像処理プログラム、画像処理装置、画像処理システム、および画像処理方法
【課題】画像から検出される所定の物体または図柄の位置の微細なブレを防止すること。
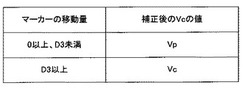
【解決手段】画像から所定物体または所定図柄の位置を順次検出する。そして、第1画像から検出された当該画像上での所定物体または所定図柄の位置と、当該第1画像以前に取得された第2画像から検出された当該画像上での上記所定物体または所定図柄の位置に基づいて、当該所定物体または所定図柄の移動量を計算する。そして、上記移動量が第1閾値未満である場合には、上記第1画像から検出された当該画像上での上記所定物体または所定図柄の位置を、上記第2画像から検出された当該画像上の上記所定物体または所定図柄の位置へと補正する。
(もっと読む)
映像情報処理方法及びその装置

【課題】 非監視対象の人物にプライバシー保護のための隠蔽処理を施す場合に、予め監視対象人物または非監視対象人物の情報を記録しておく必要があった。
【解決手段】 撮像された空間の画像から複数の人物の各々が存在する複数の人物領域を検出する。検出された複数の人物領域の各々の特徴量を算出し、算出した特徴量と特徴量から求められる統計値を用いて評価値を算出する。複数の人物領域の各々で算出された評価値に合わせて画像加工処理を施す。これにより、各人物が監視対象の空間において平均的な行動または状態から離れた監視対象人物であるか否かの判断を行う。さらに、非監視対象人物に対して、プライバシー保護のための画像加工を行う。
(もっと読む)
画像処理装置及び画像処理方法
【課題】コントラストの調整を適切に行うことができる画像処理装置及び画像処理方法等を提供する。
【解決手段】画像処理装置には、撮影の対象とする人物顔内から、予め定められた第1の輝度レベル検出領域及び第2の輝度レベル検出領域を検出する領域検出手段と、前記第1の輝度レベル検出領域の輝度レベルと所定の基準輝度レベルとの差の絶対値を高輝度量として求め、前記第2の輝度レベル検出領域の輝度レベルと前記基準輝度レベルとの差の絶対値を低輝度量として求める輝度量算出手段と、前記高輝度量と前記低輝度量との差又は比が所定の範囲内にあるか否かの判定を行う判定手段と、が設けられている。
(もっと読む)
生体監視装置
【課題】監視対象者の眼鏡類のズレだけでなく生体状態の監視を行なって利便性を高めることが可能な生体監視装置を提供する。
【解決手段】眼領域検出装置10は、ドライバDの生体状態を監視する生体監視装置であって、ドライバDの顔面における眼鏡類に関する眼鏡類情報を取得する眼鏡情報検出部1と、顔面に関する顔面情報を取得する顔向き角度演算部2と、眼鏡情報検出部1により取得された眼鏡類情報、及び顔向き角度演算部2により取得された顔面情報に基づいて眼鏡類の配置状況を特定する眼鏡テンプル角度演算部3と、眼鏡テンプル角度演算部3により特定された眼鏡類の配置状況に基づいてドライバDの生体状態を監視する眼領域検出部4と、を備える。
(もっと読む)
画像処理装置、画像処理方法、及びコンピュータプログラム
【課題】 撮影を行う場合や撮影画像の編集を行う場合に、イマジナリラインをユーザに意識させる。
【解決手段】 プレビュー用に撮影された画像から複数の特徴点を検出し、検出した特徴点から、始点となる始点特徴点と終点となる終点特徴点をユーザに選択させる。その後、撮影が開始すると、始点特徴点と終点特徴点が撮影された画像にあるか否かを判定し、ある場合には、始点特徴点及び終点特徴点の位置関係と、直前に得られた始点特徴点及び終点特徴点の位置関係とを比較する。そして、始点特徴点及び終点特徴点の位置関係が同じである場合には、始点特徴点から終点特徴点に向かうイマジナリラインを表示する。一方、始点特徴点及び終点特徴点の位置関係が同じでない場合には、始点特徴点から終点特徴点に向かうイマジナリラインを、位置関係が同じ場合に表示するイマジナリラインと異なる態様で表示する。
(もっと読む)
物体検出装置および物体検出方法
【課題】画像における検出対象の検出の精度を向上させることを課題とする。
【解決手段】画像センサー31によって撮像された画像情報に含まれる検出対象を検出する物体検出装置1に、画像情報に含まれる特徴点毎の実際のオプティカルフローを取得するオプティカルフロー取得部27と、ミリ波レーダー32によって測定された、ミリ波レーダー32と検出対象との間の距離および相対速度に係る情報を取得する距離・速度取得部21と、検出対象が画像センサー31によって撮像されたと仮定した場合のオプティカルフローの理論値を、距離および相対速度に係る情報に基づいて算出する理論値算出部26と、特徴点毎の実際のオプティカルフローと理論値とを比較し、実際のオプティカルフローが理論値に一致または近似する特徴点を、端点候補として抽出する検出対象抽出部28と、を備えた。
(もっと読む)
顔特徴点検出装置および眠気検出装置
【課題】 実用化が容易であり、高い精度で表情を捉えることができる顔特徴点検出装置および眠気検出装置を提供する。
【解決手段】 眠気検出装置20は、まず、撮影装置10により運転者3の顔画像を撮影して、運転者3の顔上の特徴点を取得するときに用いる個人情報モデルにおける2D基準顔と2Dテンプレートを作成する(S1)。次に、覚醒状態における特徴点を取得し(S2)、眠気を検出するタイミングで特徴点を検出して眠気レベルを推定する(S3)。眠気レベルに応じて、居眠り防止のための装置を動作させる信号を出力する(S4)。特徴点の取得は、撮影装置10により運転者3の顔画像を撮影し、その画像を2D基準顔および2Dテンプレートを変形してフィッティングし、撮影画像から特徴点の2次元座標を取得する。次に、共通モデルである3D基準顔とフィッティングして3次元座標を求める。
(もっと読む)
乗員姿勢推定装置
【課題】自己遮蔽が発生した場合の姿勢推定精度を簡易な構成で向上させる
【解決手段】運転席及びその周辺を繰り返し撮影し、撮影された画像データを取得する(S10)。そして、取得された画像データに含まれる運転者の人体特徴点を検出し(S50)、人体特徴点の位置の変化に基づいて、人体特徴点の位置(人体特徴点予測位置)を予測する(S60,S70)。さらに、人体特徴点予測位置に基づいて、運転者の行動を予測する(S80)。また、予測した運転者行動に基づいて自己遮蔽が発生するか否かを判断する(S100,S120)。そして、自己遮蔽が発生すると判断された場合には(S20:YES)、自己遮蔽用人体特徴点検出アルゴリズムに設定する(S40)。一方、自己遮蔽が発生しないと判断された場合に(S20:NO)、自己遮蔽の発生を考慮しない通常用人体特徴点検出アルゴリズムに設定する(S30)。
(もっと読む)
診断支援システム、診断支援プログラムおよび診断支援方法
【課題】シリーズ画像の比較読影で、画像方向が異なるシリーズが指定されたときに、最善の画質の診断画像を提供する。
【解決手段】被検体の解剖学的特徴を表す点で、画像方向が異なるボリュームデータV1orgとV2orgに共通に含まれる点を、少なくとも1つ識別し、ランドマークL1,L2として設定する。設定されたランドマークに基づいて、ボリュームデータ間で統一された座標系9を設定する。ボリュームデータ間で、画像方向の情報を対比し、画像方向の不一致が検出されたら、スライス間隔が最大のボリュームデータ(V2org)の画像方向(サジタル)を、再構成画像の画像方向に決定する。他のボリュームデータ(V1org)から、画像方向が同じ且つ同じ断面の再構成画像のシリーズRSI1〜RSINを生成し、スライス間隔最大のボリュームデータ(V2org)を構成するスライス画像SI1〜SINとともに表示画面に出力する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】処理量を低減しつつ、外乱による誤検知を低減し、対象とする物体のみを精度良く検知することが可能な画像処理装置、画像処理方法及びプログラムを提供する。
【解決手段】過去画像を参照して画像内のオプティカルフローを算出するオプティカルフロー算出部と、画像の一部の領域内に複数の基準点を設定し、基準点にオプティカルフローが発生したか否かを検出するオプティカルフロー検出部と、基準点にオプティカルフローが発生したとき、オプティカルフローを発生させた画素データの集合を特徴点として保存する特徴点データ保存部と、特徴点の移動位置を追跡する特徴点追跡部と、特徴点の移動位置の変化に応じて、追跡する特徴点を削除する特徴点削除部と、削除されずに残存した複数の特徴点に基づいて、画像内における物体の通過の有無を判断する通過判断部とを備える。
(もっと読む)
カメラ姿勢推定装置およびカメラ姿勢推定プログラム
【課題】カメラ姿勢の推定において、精度、頑健さ、撮影環境の自由度を向上すること。
【解決手段】カメラ姿勢推定装置1は、予め作成された被写体の3次元モデル11および特徴点データベース21と入力撮影画像とに基づいて、エッジ対応誤差err1と、特徴点対応誤差err2とを含むトラッキング状態を計測するトラッキング状態計測部40と、トラッキング状態に応じて、エッジ対応誤差err1と特徴点対応誤差err2とを案分する指標として、エッジベーストラッキングと特徴点ベーストラッキングとを統合した統合トラッキングの信頼度fを計算する信頼度計算部50と、必要に応じて補正信頼度ηを生成する信頼度補正部60と、補正信頼度ηに応じて、エッジ対応誤差err1と特徴点対応誤差err2とを案分する割合を変動させて統合誤差errを生成し、統合誤差が最小となるようにカメラ姿勢Ek+1を推定するカメラ姿勢推定手段70とを備える。
(もっと読む)
画像処理装置、画像処理方法及びコンピュータプログラム
【課題】キャリブレーションパターン画像の撮像の手間を簡略化することができるとともに、より広い領域にて高い精度でディストーション補正をすることができる画像処理装置、画像処理方法、及びコンピュータプログラムを提供する。
【解決手段】撮像手段でキャリブレーションパターン画像を取得し、取得したキャリブレーションパターン画像に基づいてキャリブレーションを実行してディストーション補正する。撮像手段で撮像することが可能な撮像範囲に配置した特徴点が一定の間隔を有する複数のキャリブレーションパターン画像を取得し、それぞれ特徴点群を抽出する。撮像範囲の互いに異なる領域にてそれぞれ抽出した特徴点群に基づいて、キャリブレーションを実行する。
(もっと読む)
外傷性脳損傷の迅速かつ正確な定量的評価システム
自動セグメンテーションのためのシステムおよび方法であって、体積画像中で画像化された関心のある解剖学的構造の、頂点および辺を含む複数のポリゴンから形成される変形可能モデルを選択し、前記変形可能モデルをディスプレイ上に表示し、前記複数のポリゴンのそれぞれに対応する前記関心のある解剖学的構造の特徴点を検出し、前記変形可能モデルが前記関心のある解剖学的構造の境界に変形するまで、各頂点を対応する特徴点のほうに動かすことによって前記変形可能モデルを適応させて前記関心のある解剖学的構造のセグメンテーションを形成することによって実行される。 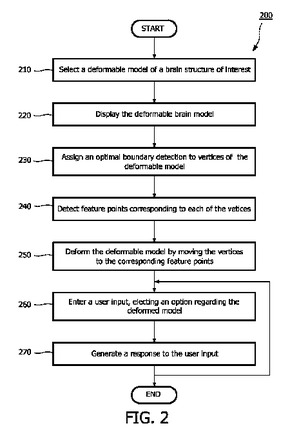 (もっと読む)
(もっと読む)
カメラ及び検索パターンを使用して対象物の空間特性を決定するためのシステム、装置、方法、及びコンピュータプログラム製品
【課題】対象物ホルダの上面に配置した対象物を評価するためのシステム、装置、方法、及びコンピュータプログラム製品を提供する。
【解決手段】対象物ホルダ110を複数位置の各々に位置させながら、対象物102の取得部分の一部を現す少なくとも1つの第一フレームを取得する。対象物ホルダ110を各位置に位置させながら、対象物ホルダ110の少なくとも一つの別の面の取得部分を現す少なくとも1つの第二フレームを取得する。取得したフレームのうち少なくとも1つのフレームに基づいて、対象物102の取得部分に関連した少なくとも一つの空間特性を決定する。各第二フレームにおいて取得した複数の光学マーカーの値を決定する。ここで、少なくとも上記光学マーカーのうち少なくとも2つはそれぞれ異なった値を有する。少なくとも一つの異なる面の上記取得部分の値及び向きに関連した少なくとも一つの座標が決定される。
(もっと読む)
超音波診断システム
【課題】三次元エコーデータにおける断面の位置を分かりやすくする。
【解決手段】記憶装置30には、臓器や胎児などの観察対象の三次元形状を表す参照モデルデータ32が記憶されている。座標整合処理部36は、メモリ18に記憶されたボリュームデータ(三次元エコーデータ)と、参照メモリとを位置合わせするための座標変換を計算する。カーソル生成部38は、断層画像生成部20が生成している断層画像に対応する断面を、その座標変換により変換することで、参照モデルの座標系におけるその断面の位置や向きを求め、求めた位置や向きを持つ断面カーソルを生成する。モデル画像生成部40は、断面カーソルと参照モデルとをレンダリングすることで、モデル画像を生成する。生成されたモデル画像は、画像生成・合成部22により、断層画像と組み合わされ、表示装置24に表示される。
(もっと読む)
画像処理装置およびこれを備えた包装装置
【課題】被撮像物を適切に認識することができる画像処理装置およびこれを備えた包装装置を提供する。
【解決手段】基準線作成部は、仮想円BCの複数の接線をそれぞれ引き、これらをそれぞれ基準線SL1とする。平行移動部は、基準線作成部により作成された複数の基準線SL1をそれぞれ仮想円BCの中心CPに向かう方向へ平行移動させる。基準線停止部は、平行移動部により平行移動された各基準線SL1が2値画像データに係る画像GT1と交差した場合に各基準線SL1の移動を停止させる。輪郭抽出部は、基準線停止部により停止された各基準線SL1内に含まれる画像GT1のドットの数およびこれらのドットの並びに基づいて複数の補完画像HGを形成する。これにより、2値画像データに係る画像GT1の欠損部分が複数の補完画像HGにより補完される。
(もっと読む)
樹木本数算定方法及び樹木本数算定装置
【課題】広域の森林を対象に安価な費用で、全域又は任意の範囲において樹種別の樹木本数算定方法及び樹木本数算定装置を提供する。
【解決手段】森林を含む地域を上空から撮影して得られた撮影画像データから、各樹頂点を抽出する樹頂点画像データ作成部41と、各樹冠を抽出する樹冠画像データ作成部42と、各樹冠の日向部を含む情報を作成する樹冠情報画像データ作成部43と、各樹冠の日向部とされた領域の分光反射特性に基づいて当該樹冠の樹種を特定する樹種分類画像データ作成部44と、樹頂点の樹種を特定する樹頂点別樹種分類画像データ作成部45と、森林域の全領域又は任意の範囲に含まれる樹木の本数を樹種別に算定する樹木本数算定部50とを有することを特徴とする樹木本数算定方法及び樹木本数算定装置。
(もっと読む)
画像選択装置および画像選択方法
【課題】人の顔を含んだ画像データのうち、印刷に適した画像データを印刷対象の画像データとして効率よく選択可能とする。
【解決手段】印刷装置100は、メモリカードMC等から画像データを入力すると、その画像データ中に撮像された顔の領域を検出する。そして、この顔領域の大きさと位置とが、官能評価実験を行って許容範囲テーブルTBLに予め設定された許容範囲に収まる場合には、入力した画像データを印刷対象の候補として選択する。一方、許容範囲に収まらない場合には印刷対象としては選択しない。
(もっと読む)
信号処理装置、レーダ装置及び信号処理プログラム
【課題】受信信号の種類に応じて柔軟に信号処理を行うことが可能な信号処理装置を提供する。
【解決手段】レーダ指示機3は、受信信号取得部13と、種類識別処理部18と、種類別信号処理部20と、を備える。受信信号取得部13は、レーダアンテナ11が受信した受信信号を取得する。種類識別処理部18は、受信信号の種類を識別する。種類別信号処理部20は、受信信号を種類ごとに抽出する。また、前記種類別信号処理部20は、抽出された受信信号に対して、受信信号の種類ごとに個別の信号処理を行う。
(もっと読む)
3次元デジタイザ
【課題】連続性のある実画像に3次元情報を持たせ、仮想空間の任意の視点から実画像に含まれる物体を見ることが可能な画像データを生成する3次元デジタイザを提供する。
【解決手段】撮像手段2はカラー画像を撮像し、距離画像生成手段1は撮像手段2と重複する視野を持ち距離画像を生成する。撮像位置計測手段4は、撮像手段2および距離画像生成手段1による撮像位置と撮像方向とを計測する。座標変換手段3は、距離画像に規定した装置座標を位置計測手段4により計測した撮像位置および撮像方向を用いて実空間に規定されている3次元の実空間座標に変換する。座標変換手段3で得られた物体の実空間座標を用いることにより、仮想空間形成手段5では、物体のモデリングを行い仮想空間を形成する。さらに、外観形成手段6は、仮想空間に配置した物体に撮像手段で撮像した物体の外観をテクスチャとしてマッピングを行う。
(もっと読む)
261 - 280 / 1,510
[ Back to top ]