
Fターム[5B057DC05]の内容
Fターム[5B057DC05]の下位に属するFターム
重心 (501)
始点、終点、屈曲点、分岐点 (396)
Fターム[5B057DC05]に分類される特許
181 - 200 / 1,510
画像処理装置、撮像装置、画像処理プログラム及び記憶媒体
【課題】 被写体を美しく見せるとともに、不自然な印象を与えない画像を容易に生成することを目的とする。
【解決手段】 第1画像を入力する画像入力部と、前記画像入力部により入力された前記第1画像の顔領域を検出する顔検出部と、前記第1画像とは異なり、且つ前記顔検出部により検出された前記第1画像の顔領域の特徴量と同一となる特徴量を有する第2画像に基づいて、前記第1画像の顔領域に対する補正処理を実行する画像補正部とを備える画像処理装置。
(もっと読む)
眼底撮像装置及びその制御方法

【課題】 眼底画像から精度良く眼球の動きを検出する場合に、血管などの特徴点の輝度が十分確保できていない際にもテンプレートマッチングを行って眼球追尾ができる眼底撮像装置を提供する。
【解決手段】 眼底画像を取得する為の眼底撮像手段と、眼底撮像装置で撮像された初期眼底画像から特徴点を抽出する抽出手段と、抽出された特徴点の輝度情報を評価する評価手段と、眼底撮像装置の撮像時のフレームレートを設定する設定手段と、を有する眼底撮像装置において、前記評価手段による評価結果に応じ、フレームレートを決定する。
(もっと読む)
情報処理装置、情報処理方法、およびプログラム
【課題】動画像上の被写体が動作区間を精度よく速やかに判別する。
【解決手段】本実施の形態においては、順次入力される各フレームの唇画像に順次注目し、注目した唇画像tを基準として、その前後それぞれのNフレームから成る合計2N+1枚の唇画像を所定の位置に配置して1枚の合成画像を生成する。この生成された1枚の合成画像に対して、ピクセル差分特徴量が演算される。本発明は、例えば、動画像の被写体である人物の発話区間を精度よく検出する場合に適用することができる。
(もっと読む)
三次元形状計測装置、三次元形状計測装置のキャリブレーション方法、およびロボット装置
【課題】複数の方向から計測対象物体を撮像して三次元形状を計測する三次元形状計測装置のキャリブレーションを、簡便な作業で短時間に行う。
【解決手段】三次元形状計測装置1は、キャリブレーション用ブロックと、撮像部12−1,12−2がそれぞれ撮像した撮像画像領域から、キャリブレーション用ブロックの上面に照射されたスリット光による光切断線をそれぞれ検出する光切断線検出部23と、光切断線検出部23がそれぞれ検出した光切断線から特徴点をそれぞれ検出して二次元座標値を取得する特徴点検出部24と、二つの撮像画像領域それぞれにおける特徴点の二次元座標値を単一の二次元座標系の二次元座標値に変換するための座標変換パラメーターを計算する座標変換パラメーター計算部25とを備えた。
(もっと読む)
移動距離検出装置及び移動距離検出方法
【課題】移動距離の算出精度を向上させることが可能な移動距離検出装置及び移動距離検出方法を提供する。
【解決手段】移動距離検出措置1は、所定領域を撮像するカメラ10と、カメラ10の撮像画像のデータを入力する計算機30とを備えている。計算機30は、カメラ10による撮像にて得られた所定領域の画像を鳥瞰視される状態へ視点変換し、視点変換された異なる時刻の鳥瞰画像データの位置を合わせる。また、計算機30は、位置合わせされた鳥瞰画像データの差分画像データに基づいて、立体物を検出する。また、計算機30は、視点変換により立体物が倒れ込む方向に沿って、差分画像データ上において所定の差分を示す画素数をカウントして度数分布化することで差分波形を生成し、当該差分波形の時間変化から立体物の移動距離を算出する。
(もっと読む)
自動処理装置
【課題】装置本体の消費電力を十分に抑制でき、且つ装置の寿命延命化を図ることができる自動処理装置を提供する。
【解決手段】ATM1は、利用者検知ユニット10が利用者を検知すると、表示・操作ユニット3に対する一次電源の供給を開始する。ATM1は、利用者による取引種別の選択入力が行われると、選択された取引種別の取引処理に関与するユニットを判断し、ここで判断したユニットに対する電源供給を開始する。一方、ATM1は、利用者検知ユニット10で検知された利用者が取引を行わなかったとき(利用者の誤検知であった場合)、一次電源の供給を開始したユニット毎に動作の停止を指示し、そのユニットのシャットダウン処理の完了後に一次電源の供給を停止する。
(もっと読む)
画像処理装置、および画像処理方法、並びにプログラム
【課題】異なる視点からの撮影画像である左画像と右画像を適用した被写体距離の算出を確実に行うための変換パラメータを算出する装置および方法を実現する。
【解決手段】異なる視点から撮影された左画像と右画像の射影変換を実行する射影変換処理を実行して、射影変換のなされた射影変換左画像と射影変換右画像を適用したステレオマッチングによるエラー評価値を取得する。射影変換左画像と射影変換右画像の画像回転角度情報とエラー評価値の対応情報に基づいてエラー評価値が最小となる画像回転角度を求め、その画像回転角度に対応する射影変換パラメータを算出する。この処理により、ステレオマッチングにおいてエラーの発生可能性が低減された最適な射影変換パラメータを算出することができる。
(もっと読む)
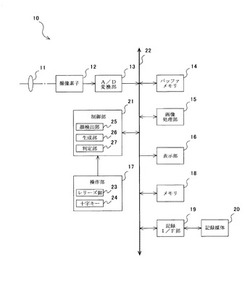
ステレオ画像処理装置、画像処理方法及びプログラム
【課題】 撮影画像の画質及び距離画像の精度を向上することのできるステレオ画像処理装置を提供する。
【解決手段】 マッチング回路18は、増幅回路16から出力される2つの映像信号に対して周知のマッチング処理を行い、画像のずれ量を示す信号を出力する。距離画像生成回路20は、マッチング回路18からの出力を受けて、撮影対象物までの距離を測定して距離画像を生成する。加算回路22は、増幅回路16から出力される映像信号の一方に対して、画像のずれ量に相当する分だけ画像をずらした後に、2つの映像信号を加算することで、低輝度域や中輝度域におけるノイズ成分を低減する。加算回路22からの出力信号に対し、非線形処理回路24による非線形処理が施され、監視用画像が出力される。また、増幅制御回路28では、増幅回路16から出力される映像信号のレベルが所定範囲内に入るように、増幅回路16での増幅率を制御する。
(もっと読む)
映像処理装置、映像処理方法、および映像通信システム
【課題】立体映像を観察するためのめがねの新たな利用分野を提供する。
【解決手段】映像処理装置において、撮像部は、3次元空間における被写体を異なる視点から見た場合の第1の視差画像と第2の視差画像とを含む立体映像を観察するためのめがねをかけた人物の顔を含む被写体を撮像する。めがね特定部306は、前記撮像部が撮像した被写体の映像から前記めがねを特定する。顔検出部308は、めがね特定部306が特定しためがねをもとに、前記撮像部が撮像した被写体の映像から人物の顔領域を検出する。拡張現実演出部314は、顔検出部が検出した人物の顔領域に仮想的な特徴を付加する。
(もっと読む)
移動体挙動検出装置及び方法
【課題】移動体のヨー方向と横方向の挙動を高い精度で区別できる移動体挙動検出装置等を提供する。
【解決手段】前方撮像カメラ及び後方撮像カメラにより撮像された画像を取得し、車両1の前方方向に含まれる前方特徴点Pfと、当該前方方向とは異なる後方方向に含まれる後方特徴点Pbとを計測し、車両1の前方方向に含まれる前方特徴点Pfの移動方向(Pf’→Pf)と、車両の後方方向に含まれる後方特徴点Pbの移動方向(Pb’→Pb)とを比較する。当該双方の移動方向が異なる場合には車両1が横方向に移動していると判別し、当該双方の移動方向が同じである場合には車両1がヨー方向に移動していると判別する。
(もっと読む)
画像入力装置、画像入力方法及び画像入力プログラム
【課題】特殊な光学系を用いることなく、複数の異なる位置に配置した画像センサでの撮影結果を統合することで、被写体またはカメラが動いている状況、もしくは照明環境が変動している状況下においてもマルチバンド画像の取得を可能にする。
【解決手段】被写体の基準画像を得る第1の撮像手段と、所定の分光透過率を有する光学フィルタを備え、被写体の分光情報画像を得る第2の撮像手段と、第1及び第2の撮像手段により得られた基準画像と分光情報画像との対応点を探索して、三角測量の原理に基づき、分光情報画像の視点位置を基準画像の視点位置に一致させるための画像変形パラメータを求める対応点検出手段と、画像変形パラメータに基づき、分光情報画像の変形処理を行う画像変形処理手段と、基準画像と、画像変形処理手段により画像変形を行った後の分光情報画像とをマルチバンド画像として出力する画像出力手段とを備えた。
(もっと読む)
情報処理装置、情報処理システム、及びプログラム
【課題】撮影された映像の視界空間上の座標に対して関連づけられたタグを用いることのできる情報処理システムを提供する。
【解決手段】情報処理装置100は、コンテンツを撮影する撮像装置の位置である視点位置の情報を取得する視点情報取得部121と、上記視点位置から上記コンテンツを撮影したときの視界空間を示す視界情報を取得する視界情報取得部122と、上記視点情報、上記視界情報、及び奥行き情報により特定される視界空間上の座標位置と関連づけられたタグの情報を生成するタグ情報生成部124とを有する。
(もっと読む)
電子機器及び画像処理プログラム
【課題】静止画や動画を素材とし、この素材の登場順序に任意性とランダム性とを併せ持つ動画を生成すること。
【解決手段】動画像再生アプリケーションプログラム152において、素材入力部201は、インタフェース部250を介して入力された素材を素材格納部211に、素材情報を素材情報データベース212に格納する。素材分析部202は、素材格納部211に格納された素材を分析し、分析結果を素材情報データベース212に格納する。合成動画生成部204は、操作受付部203からの抽出キーの順序と、素材情報データベース212からの素材情報とに基づいて、素材格納部211から読み出した素材を順次利用した合成動画を生成する。合成動画生成部204は、生成された合成動画を合成動画格納部213に格納する。
(もっと読む)
顔表情変化度測定装置およびそのプログラム並びに番組興味度測定装置
【課題】撮影環境の変動に対しても頑健に撮影画像から顔表情の変化度を測定する技術を提供する。
【解決手段】顔表情変化度測定装置1は、被写体の撮影画像において顔領域検出手段4によって検出された顔領域からSURFを特徴点として抽出する画像特徴量抽出手段5と、被写体の標準顔から抽出されたSURFをクラスタに分類すると共に、当該被写体の入力顔から抽出されたSURFを、標準顔のSURFを分類したときの各クラスタのうち特微量に関して最も距離の近いクラスタに分類するクラスタリング手段8と、標準顔に対して分類された各クラスタと、入力顔に対して分類された各クラスタの双方について、クラスタ毎にクラスタ中のSURFの個数を頻度とするヒストグラムをそれぞれ作成するヒストグラム作成手段9と、標準顔ヒストグラム13と入力顔ヒストグラム14との差分を被写体の顔表情変化度として算出する差分算出手段11とを備える。
(もっと読む)
位置姿勢計測装置及び位置姿勢計測プログラム
【課題】初期設定でユーザに手間を掛けることなく正確にカメラポーズ及び対象の3次元形状を計測できるようにする。
【解決手段】初期値算出部11は、平面上に撮像対象が配置されている状態を、球形等の近似似撮像対象が配置されている状態であると近似し、初期カメラポーズを決定し、3次元座標を算出する。また、初期値算出部11は、初期値の候補から実際の3次元シーンの真値に近い値を選択し初期値として設定する。これにより、ユーザによる事前の作業なく、初期値として実際の3次元シーン形状に近い形状を指定できる。
(もっと読む)
特徴点抽出装置および方法
【課題】隠蔽領域があると、特徴点を安定して検出できなかった。
【解決手段】入力画像から対象物を検出する対象物検出部101と、前記対象物検出部が出力する尤度Aを用いて各特徴点の重みを設定する重み設定部102Aと、特徴点の統計的な位置関係を表す形状モデル、および、同各特徴点位置に対して予め定義された範囲の特徴量を表すプロファイルを保持する学習結果記憶部104と、各特徴点の最良な候補位置を探索する候補点探索部103と、候補点を形状モデルに整形係数を用いて射影する整形処理部105からなるものであり、前記重み設定部102Aで設定した各特徴点に対する重みを用いて、同特徴点の候補位置と対応する形状モデル内の特徴点位置との差に対し重み付けし、前記整形係数を計算する。
(もっと読む)
撮像装置、長さ測定方法、及びプログラム
【課題】被写体上の指定された2点間の長さを精度良く測定する撮像装置を提供する。
【解決手段】被写体の指定された2点間の長さを測定する。撮像動作部100は、同一の被写体に対する1回の撮像で、視差のある1組のペア画像を取得する。表示部310は、取得されたペア画像の少なくとも一方の画像に基づく表示画像を表示する。操作部330は、表示画像上における被写体上の始点及び終点の指定を受け付ける。制御部210は、1又は複数組のペア画像に基づいて、指定された被写体上の始点及び終点における実空間上のそれぞれの位置を算出し、算出した実空間上の始点及び終点位置に基づいて、被写体上の始点から終点までの長さを取得する。
(もっと読む)
対象物検出方法及び対象物検出プログラム
【課題】画像内に含まれる目的の対象物を検出する速度を向上させる。
【解決手段】標準パターンの領域を、任意の点である領域分割中心点から放射線状に2つ以上の領域に分割し、分割領域ごとに領域分割中心点から最大距離にある標準パターン画素位置を標準パターン代表点として選定する。被判定パターンの領域を、標準パターン代表点選定ステップと同じ条件で領域分割中心点を用いて2つ以上の領域に分割し、分割領域ごとに領域分割中心点から最大距離にある被判定パターン画素位置を被判定パターン代表点として選定する。対応する分割領域における標準パターン代表点の座標と被判定パターン代表点の座標の位置的差異を求め、すべての分割領域において位置的差異が予め定められた範囲内であるときに被判定パターンは目的の対象物であると判定する。
(もっと読む)
画像表示装置、画像領域検出方法及びコンピュータプログラム
【課題】表示画像中に存在する特定条件の画像領域を精度よく検出することができる画像表示装置、画像領域検出方法及びコンピュータプログラムを提供する。
【解決手段】入力画像の各画素がモノクロ画素であるか否かを判定し、入力画像の各ラインからモノクロ画素で構成されるモノクロライン領域を検出し、複数のモノクロライン領域で構成されるモノクロ画像領域を検出する。検出した2つのモノクロ画像領域の開始点又は終了点が一致し、この2つのモノクロ画像領域間のライン数が第6閾値以下の場合に、この2つのモノクロ画像領域間の一又は複数のラインについて、モノクロ画像領域の再検出を行う。2つのモノクロ画像領域のうちライン方向の大きさが小さい方のモノクロ画像領域に、2つの有効画像領域間のラインの一部分を加えて新たなモノクロ画像領域とする。
(もっと読む)
ナビゲーション装置
【課題】カメラからの映像を、地図情報と自車位置とのマップマッチング以外の用途にも利用することが可能なナビゲーション装置を提供する。
【解決手段】自車両の周辺を撮像し撮像信号を出力するリアカメラ24と、自車両の走行状態を表す信号を出力する振動ジャイロ14aおよび速度センサ14bと、リアカメラ24が出力する撮像信号に基づいてキャリブレーション情報を演算する演算部35と、キャリブレーション情報に基づいて、振動ジャイロ14aおよび速度センサ14bのキャリブレーションを行うキャリブレーション部36とを備えるナビゲーション装置。
(もっと読む)
181 - 200 / 1,510
[ Back to top ]