
Fターム[5B057DC05]の内容
Fターム[5B057DC05]の下位に属するFターム
重心 (501)
始点、終点、屈曲点、分岐点 (396)
Fターム[5B057DC05]に分類される特許
121 - 140 / 1,510
乗員検知装置
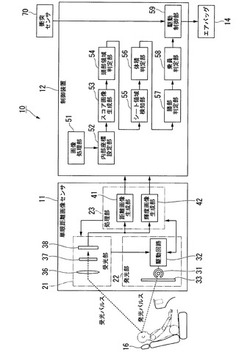
【課題】大人と子供とを精度良く判別する。
【解決手段】乗員検知装置10は、単眼距離画像センサ11から出力される距離画像に基づき、乗員領域の体積を推定し、該体積が所定体積閾値以上であるか否かを判定する体積判定部56と、車両上下方向の所定位置よりも下方側に車室内の乗員の膝部が存在するか否かを判定する膝部判定部57と、体積判定部56により乗員領域の体積が所定体積閾値以上であると判定された場合であって、膝部判定部57により所定位置よりも下方側に膝部が存在すると判定された場合には乗員は大人であると判定し、膝部判定部57により車両上下方向の所定位置よりも下方側に膝部が存在しないと判定された場合には乗員は子供であると判定する乗員判定部58とを備える。
(もっと読む)
画像処理装置、位置合わせ方法及びプログラム

【課題】変形する対象の画像を抽出し、抽出結果を基に対象の位置を補正することを可能とすることを目的とする。
【解決手段】画像を取得する画像取得手段と、画像取得手段で取得された画像から特徴量を抽出する特徴抽出手段と、対象のモデルと特徴抽出手段で抽出された画像の特徴量とを基に対象の尤度を算出する尤度算出手段と、尤度算出手段で算出された尤度を基に画像内にある対象の検出領域を検出する検出手段と、モデルと検出手段で検出された検出領域とに基づいて、対象が変動している部分と変動していない部分とを識別する識別手段と、識別手段で識別された対象が変動していない部分を基にモデルと検出領域との位置合わせを行う位置合わせ手段と、を有することによって課題を解決する。
(もっと読む)
撮像装置および画像処理プログラム
【課題】画像データが出力される状況に応じて、画像の良し悪しを適切に判定することができる。
【解決手段】被写体を撮像して画像データを生成する撮像手段と、撮像手段による撮像条件に基づいて被写界深度の範囲を算出する算出手段と、画像データを出力するときの画素数に基づいて、被写界深度の範囲外の被写体を被写界深度の範囲内に含まれているものと判定する判定手段とを備える。
(もっと読む)
対象物検出装置及び方法
【課題】広い監視領域における大きさが異なる複数の対象物の位置や速度を推定できるようにすること。
【解決手段】本実施形態に係る対象物検出装置は、複数台のカメラにより道路上に存在する対象物を撮影した基準画像上で分割した短冊状領域の各点に関して、他のカメラで撮影された参照画像上で対応する点を算出する対応点算出部4と、各短冊状領域内の各点と、求められた参照画像の対応点との間の画像特徴量の一致度を算出する画像一致度算出部5と、短冊状領域の高さと対象物の接地位置とを変数として画像特徴量の一致度を最大にする接地位置関数を生成する接地位置算出部6と、接地位置関数における短冊状領域の高さに基づいて対象物の高さを算出する対象物高さ算出部7とを備える。
(もっと読む)
3次元形状認識装置及び方法
【課題】画像処理の処理効率の向上と共に相対的位置角度スケールを確実に検出できる3次元形状認識装置を実現することが求められる。
【解決手段】本実施形態によれば、3次元形状認識装置は、入力部と、幾何学的要素抽出部と、幾何学的要素対応付け処理部と、位置角度推定処理部とを備えた構成である。入力部は、同一の3次元形状の認識対象に対する複数の形状データを入力する。幾何学的要素抽出部は、前記各形状データのそれぞれから幾何学的要素を抽出する。幾何学的要素対応付け処理部は、角度または距離の比を含む相似不変量をキーとするハッシュテーブルを使用し、前記各幾何学的要素間で位置関係が合致する組み合わせを選出する。位置角度推定処理部は、前記選出される複数の組み合わせに基づいて前記各形状データ間で前記認識対象の相対的位置角度スケールを示す相対的位置角度情報を算出する。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラムおよびバーチャル顕微鏡システム
【課題】染色標本を透過光により撮像して染色標本画像を取得した場合に、撮像光学系の焦点深度内に複数の組織が存在していた場合でも、現実に即した正確な画像データが得られる画像処理装置を提供する。
【解決手段】染色標本画像の各画素の第1の特徴量を算出する特徴量算出部2501と、その算出結果に基づいて対象画素における各構成要素の構成割合を算出する構成割合算出部2503と、構成要素の第2の特徴量の基準値を記憶する基準値記憶部233と、各構成要素の第2の特徴量と前記基準値とに基づいて構成要素補正係数を算出する構成要素補正係数算出部2509と、算出された構成割合と構成要素補正係数とに基づいて対象画素補正係数を算出する対象画素補正係数算出部2511と、算出結果に基づいて対象画素の第2の特徴量を補正する特徴量補正部2513と、を備える。
(もっと読む)
検査方法
【課題】本発明は検査方法に関し、より詳細には基板の検査方法を提供する。
【解決手段】基板を検査するために、まず、基板上に測定領域を設定し、続いて、測定領域に対する基準データ及び測定データを取得する。次に、測定領域内の所定の形状を含むようにブロック単位の複数の特徴ブロックを設定し、特徴ブロックのうちオーバーラップされる特徴ブロックをマージして統合ブロックを設定する。続いて、統合ブロック以外の特徴ブロック及び/または統合ブロックに対応する基準データと測定データとを比較して歪曲量を取得し、歪曲量を補償してターゲット測定領域内の検査領域を設定する。これにより、歪曲を補償した正確な検査領域を設定することができる
(もっと読む)
特定領域選択装置、特定領域選択方法及びプログラム
【課題】有用な特定領域を、視点における偏りがないように選択する。
【解決手段】学習装置200は、対象物体上の特定領域を複数選択し、複数の特定領域の夫々に関する検出手段を学習する。また、学習装置200は、複数の特定領域から特定領域の組み合わせによる領域組を生成し、検出手段及び領域組に基づいて対象物体の認識を行い、認識結果に基づいて新規の特定領域を追加する。そして、学習装置200は、新規の特定領域が追加された場合、新規の特定領域に関する検出手段を更に学習する。
(もっと読む)
画像処理システム、画像処理装置及び画像処理プログラム
【課題】物体を照合する場合に、照合の基準となる位置の特定に係る時間を、本構成を有さない場合に比較して、削減できるようにした画像処理装置を提供する。
【解決手段】画像処理装置の画像取得手段は、表面に刻印されており、該表面に皮膜が形成又は積層された物体の画像を取得し、画像抽出手段は、前記画像取得手段によって取得された画像内の刻印の部分画像を抽出し、濃度抽出手段は、前記画像抽出手段によって抽出された刻印の部分画像の濃度を抽出し、特徴変換手段は、前記濃度抽出手段によって抽出された濃度を列ねた濃度列を、前記刻印の部分画像の特徴に変換し、照合手段は、基準となる刻印の部分画像の特徴と該刻印の部分画像の濃度が対応されて登録されている記憶手段から、前記特徴変換手段によって変換された特徴に対応する濃度を抽出し、該抽出した濃度と前記濃度抽出手段によって抽出された濃度を照合する。
(もっと読む)
画像処理プログラムおよび画像処理装置
【課題】カメラの取り付け位置や取り付け姿勢の情報を迅速かつ精度良く得ることを課題とする。
【解決手段】設定部232は、4個のマーカーが映し出された画像平面上の4個に対応するカメラ座標系における仮想的な4つの対応点の中から基準マーカーとする点Mを選択する。そして、設定部232は、基準点Mまでの距離L0に所定の値を設定する。作成部233は、基準点M以外の点、つまり基準マーカー以外のマーカーに対応する点1〜点3までの各距離L1,L2,L3を表す数式を作成する。導出部234は、設定部232により設定された基準マーカーで採用する全ての符号パターンを導出する。棄却部235は、導出部234により導出された符号パターンの中から、距離L1、L2、L3の値の少なくとも1つが相応しい値となり得えない符号パターンを棄却する。
(もっと読む)
画像信号再生装置および画像信号再生方法
【課題】 モニター上に表示されている複数の人物から所定の人物を容易に特定できるようにすることを目的とする。
【解決手段】 本発明の画像信号再生装置600は、特定の人物の顔の特徴量を記憶する特徴量記憶部160と、画像信号を取得する画像取得部604と、画像信号における画面内の1または複数の顔を抽出する顔抽出部180と、抽出された1または複数の顔の特徴量を算出し、特定の人物の顔の特徴量との類似度をそれぞれ算出する類似度算出部182と、類似度と所定閾値とを比較する類似度比較部184と、画面内において、所定閾値以上の類似度を有する顔またはその周囲に、顔を特定する態様で指標を重畳する画像重畳部190と、モニター622と、指標を重畳した画像信号をモニター622に出力する画像出力部130と、を備えることを特徴とする。
(もっと読む)
画像処理プログラムおよび画像処理装置
【課題】一つのマーカーから複数の特徴点を安定して抽出することを課題とする。
【解決手段】画像処理装置200は、マーカー画像上の中心点の位置とマーカー画像上の境界線の位置とに基づいて、マーカー画像の歪みが補正されるように正規化変換する。次に、画像処理装置200は、白領域と黒領域との交差点が存在する可能性が高いほど大きな応答値が得られるフィルタを用いて正規化画像を走査し、フィルタの応答値がピークとなる正規化画像上の位置を取得する。そして、画像処理装置200は、正規化画像を逆変換することにより、正規化画像上でフィルタの応答値がピークとなる位置に対応するグレースケール画像上の位置を取得し、この位置を特徴点に決定する。
(もっと読む)
道路形状推定装置
【課題】道路形状を正確に推定可能な道路形状推定装置を提供する。
【解決手段】車両に搭載され、当該車両が走行する道路の形状を推定する道路形状推定装置であって、車両周囲の静止物の存在位置を複数の検出点として検出する物体検出部と、検出点を順次接続することによって、複数の接続経路線を形成する接続経路線形成部と、接続経路線形成部によって形成された複数の接続経路線のうち、所定の条件を満たす接続経路線を走路候補線として選定する走路候補選定部と、走路候補線に基づいて道路の形状を推定する道路形状推定部とを備えることを特徴とする、道路形状推定装置である。
(もっと読む)
画像生成装置、画像生成方法、コンピュータプログラムおよび記録媒体
【課題】自然な立体感が得られる立体視用の画像を生成すること。
【解決手段】記憶部14が、被写体を撮影した撮影画像と、その撮影画像に対応する視差画像とを記憶し、処理対象領域抽出部15cが、記憶部14に記憶された視差画像内から被写体に対応する処理対象領域を抽出し、視差値変更部15dが、処理対象領域抽出部15cにより抽出された処理対象領域の視差値を変更し、大きさ調整部15eが、視差値変更部15dにより変更された視差値に基づいて、撮影画像における処理対象領域に対応する被写体の大きさを調整し、画像生成部15fが、大きさ調節部15eにより被写体の大きさが調整された撮影画像に基づいて、立体視用の画像を生成する。
(もっと読む)
画像処理装置
【課題】撮像装置によって撮影された画像が陽炎によって画質劣化したとき、画質の劣化を補正し、揺らぎのない良好な画像を得ること。
【解決手段】参照画像推定部1と、オプティカルフロー計算部2と、動き補正部3を用いて画像処理装置102を構成して、逐次入力される入力画像から動きのない画像(参照画像)を推定し、入力画像および参照画像に基づいてオプティカルフローを計算して入力画像の局所的な揺らぎ(動きベクトル)を算出し、該動きベクトルに基づいて陽炎の揺らぎを相殺するように入力画像の部分画像を移動して入力画像中に存在する陽炎の揺らぎを取り除いた補正画像を生成するようにした。
(もっと読む)
基準パターン情報生成装置、方法、プログラムおよび一般車両位置特定装置
【課題】車両の揺動によって車載カメラの視野方向が変化した場合であっても車両の位置を特定可能な技術の提供。
【解決手段】基準車両の周囲の地物を撮影した撮影画像から前記地物の像に含まれる複数の基準画像特徴点を抽出して前記撮影画像上での位置を示す座標値を取得し、前記地物を撮影した時点での前記基準車両の位置を基準位置として取得し、前記基準画像特徴点の前記座標値と前記基準位置とを対応づけて基準パターン情報として所定の記録媒体に記録し、前記基準パターン情報を所定の記録媒体に記録する際には、前記基準車両の揺動に応じた特定の座標成分の前記座標値の変化が複数の前記基準画像特徴点において所定量以下となる場合、前記特定の座標成分の前記座標値である基準座標値を前記基準画像特徴点の前記座標値とする。
(もっと読む)
画像処理装置、画像処理方法、および制御プログラム
【課題】様々な条件の顔画像に対して適切にメーキャップ処理を行うことができる画像処理装置および画像処理方法を実現する。
【解決手段】本発明に係る画像処理装置6は、顔画像の肌に、指定された色のメーキャップを合成する処理を行うものであって、顔画像におけるメーキャップを合成する左右のメーキャップ領域について、合成後の左右のメーキャップ領域の色の差が小さくなるように、顔画像における左のメーキャップ領域の代表色と右のメーキャップ領域の代表色との差を用いて、メーキャップ色を補正して左用メーキャップ色および右用メーキャップ色を決定する色補正部16と、顔画像の左右のメーキャップ領域の肌の色に、それぞれ左用メーキャップ色および右用メーキャップ色を重ねることによりメーキャップを合成する着色部17とを備える。
(もっと読む)
電子機器及び画像処理方法
【課題】 記念日にふさわしい静止画像等を含む動画をユーザに提示できる電子機器及び画像処理方法を提供すること。
【解決手段】 実施形態によれば、電子機器は、記念日設定手段、画像設定手段、画像抽出手段、及び画像表示手段を具備する。記念日設定手段は入力された日付を記念日に設定する。画像設定手段は、ユーザによって指定された一枚の静止画像を前記記念日に関連付ける。画像抽出手段は、現在の日付が前記記念日を含む所定の期間内であるとき、複数の静止画像から前記一枚の静止画像に関連する静止画像を抽出する。画像表示手段は、前記一枚の静止画像と前記抽出された静止画像とを用いた動画像を表示する。
(もっと読む)
画像データ処理システム
【課題】長い距離にわたるコンクリート壁面などのコンクリート構造物の診断を、安価にしかも短時間で行うことが可能な画像データ処理システムを提供する。
【解決手段】移動式架台10に搭載された可視画像撮影用カメラ60と赤外線カメラ70と、最初の可視画像データ及び赤外線画像データに撮影された対象物上の基準点に基づいて、前記複数の可視画像データ及び赤外線画像データの位置関係を求め、前記最初の可視画像データ及び赤外線画像データに対して、あおり補正を施した上で、2番目以降の規格化可視画像データ及び規格化赤外線画像データを、前記位置関係に基づいて重畳し2番目以降の重畳データとし、前記最初の重畳データと前記2番目以降の重畳データとを連結することを特徴とする。
(もっと読む)
画像処理装置及び画像処理方法
【課題】本発明は画像処理装置における撮影画面中の計測範囲設定の調整を容易にすることを目的とする。
【解決手段】視野内に搬送された対象物を撮像して2次元画像を得る撮像手段と、2次元画像を画面に表示する表示手段と、得られた2次元画像から対象物の輪郭を表す輪郭線を抽出する形状抽出手段と、輪郭線上の複数の点の位置を抽出する点位置抽出手段と、複数の点から2次元画像上の対象物の搬送方向における輪郭線の位置を代表する代表点の位置を決定する代表位置決定手段と、少なくとも代表点の位置と2次元画像上の対象物の搬送方向において予め設定された計測幅とに基づいて輪郭線を含む計測領域を得られた2次元画像上に設定する計測領域設定手段と、を備える。
(もっと読む)
121 - 140 / 1,510
[ Back to top ]