
Fターム[5B057DC05]の内容
Fターム[5B057DC05]の下位に属するFターム
重心 (501)
始点、終点、屈曲点、分岐点 (396)
Fターム[5B057DC05]に分類される特許
301 - 320 / 1,510
画像処理装置、画像処理方法および画像処理プログラム
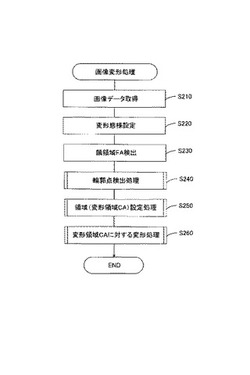
【課題】顔毎の形状等の特徴の違いをより正確に捉えた上で変形処理を行なうことが望まれていた。
【解決手段】注目画像に含まれる顔の輪郭に対応する輪郭点を検出する検出部と、上記検出された輪郭点の位置に基づいて、上記顔の少なくとも一部を含む領域を変形処理の対象領域として設定する領域設定部と、上記設定された対象領域内の画像の変形を行う変形処理部とを備える構成とした。また、上記注目画像としての動画を構成するフレーム画像毎に、上記輪郭点の検出と対象領域の設定と画像の変形とを行なう。
(もっと読む)
画像処理システム、画像処理装置、及びプログラム

【課題】画像変換を行うサーバに対して画像情報を秘匿したまま、変換に必要な情報を演算させる技術が望まれている。
【解決手段】予め定められた座標に標識画像が付された画像を、処理対象画像として受け入れ、当該受け入れた処理対象画像から、標識画像の処理対象画像上での座標を表す情報を抽出して抽出情報を生成する。変換処理装置に対して、生成した抽出情報を送信して変換用情報を受信し、当該受信した変換用情報を用いて、処理対象画像に対する変換処理を実行する。
(もっと読む)
画像変換パラメータ算出装置、画像変換パラメータ算出方法およびプログラム
【課題】画像変換を表す変換パラメータとして、適切な自由度の座標変換モデルにおける変換パラメータを求めることができる画像変換パラメータ算出装置を提供する。
【解決手段】パラメータ計算手段5は、変換の自由度で分類した座標変換の種類を示す座標変換モデル毎に、画像間で対応する特徴点の組を用いて、座標変換を表す変換パラメータを計算する。モデル適切性判定手段6は、パラメータ計算手段が計算した変換パラメータを用いて第1画像の特徴点の座標を変換し、その特徴点に対応する第2画像の特徴点の座標と、変換によって得た座標との差に基づいて、その変換パラメータに対応する座標変換モデルが第1画像から第2画像への変換として適切であるか否かを判定し、適切であると判定した座標変換モデルに関して計算された変換パラメータを第1画像から第2画像への変換パラメータとして確定する。
(もっと読む)
画像処理装置及び画像調整方法
【課題】カメラからの画像の歪みを補正する処理を自動的に行なうことを可能とすることで、カメラに関する調整作業の効率化を図ることができる画像処理装置を提供することにある。
【解決手段】カメラ20により動体を撮影して得られる画像を処理するときに、画像上の移動軌跡線を算出し、この移動軌跡線に基づいてカメラのレンズ歪み補正パラメータを調整情報として算出する調整量算出部14を有する画像処理装置10である。
(もっと読む)
高解像度化装置
【課題】計算量の累積的な増加を抑えつつ、対応点を増加させて高解像度化処理を行うことのできる高解像度化装置を提供する。
【解決手段】高解像度化部12は、1つの画像内の複数の画素から注目点Aの画素を1つずつ順次設定する候補指定部102と、注目点Aの画素を含む注目ブロックPに含まれる画素値の変化パターンと同一あるいは類似する画素値の変化パターンを有する対応ブロックQから注目点Aの画素に対応する対応点Bを抽出するマッチング誤差算出部103等と、注目点Aと対応点Bを直線で結んだ線分の区間内に新たな対応点Cを生成する対応点増加部109と、注目点A、対応点B及び新たな対応点Cから、高解像度画像の画素値を算出する高解像度画素値算出部106を有する。
(もっと読む)
カメラパラメータのキャリブレーション装置及びプログラム
【課題】直感的なキャリブレーション処理を可能とする、カメラパラメータのキャリブレーション装置を提供する。
【解決手段】キャリブレーション装置は、各撮影画像内の同じ被写体の同じ点である対応点それぞれについて、撮影画像内での位置を示す画像座標系での第1の座標を保存する手段と、各カメラのカメラパラメータから世界座標系と画像座標系とを変換する射影行列をそれぞれ計算する手段と、各カメラそれぞれについて、カメラの射影行列及び該カメラの撮影画像内の第1の座標に基づき実空間内の直線を求める手段と、各カメラの射影行列及び各撮影画像の第1の座標に基づき実空間上の1点の世界座標を求め、求めた世界座標と座標変換手段が求めた各直線との距離に基づき誤差量を算出する手段と、算出した誤差量を表示する手段と、保存している各カメラのカメラパラメータを変更する手段とを備えている。
(もっと読む)
画像処理装置
【課題】顔の特徴部位の座標位置の検出処理に多くの時間を要しており、また、当該検出の精度向上が望まれていた。
【解決手段】画像に含まれる顔の特徴部位の座標位置を検出する画像処理装置であって、注目画像から顔の少なくとも一部を含む画像領域を顔領域として検出する顔領域検出部と、上記顔領域を含む所定範囲の画像を上記注目画像からトリミングするトリミング部と、上記トリミングされた画像のサイズを所定サイズに変換する変換部と、上記サイズが変換された画像に基づいて上記特徴部位の座標位置を検出する特徴位置検出部とを備える。上記変換部は、上記トリミングされた画像に対するノイズ低減のための処理とともに上記サイズの変換を実行する。
(もっと読む)
ボリュームデータ間の対応付け方法
【課題】処理時間を短縮し、かつ精度よくボリュームデータ間の位置合わせを行う。
【解決手段】参照ボリュームデータ(D1)から探索ウィンドウ(3次元ブロック)を複数抽出する。抽出した複数の探索ウィンドウに設定される基準点に対応する入力ボリュームデータ(D2)の探索ウィンドウ内の対応点を、各探索ウィンドウより抽出したボクセルデータの相関(3次元POC)から探索する。探索した対応点と基準点との対応関係から参照ボリュームデータと入力ボリュームデータとの間の剛体変形パラメータ(回転ずれ、位置ずれを示すパラメータ)を推定し、入力ボリュームデータを剛体変形(回転ずれ、位置ずれを補正)する。剛体変形処理後の入力ボリュームデータと参照ボリュームデータについて、同様にして対応点を探索し、探索した対応点の情報を用いてFFD(Free-Form Deformation)により、入力ボリュームデータをさらに非剛体変形させる。参照ボリュームデータを剛体・非剛体変形させてもよい。
(もっと読む)
情報処理装置、および情報処理方法、並びにプログラム
【課題】計算量を削減し効率的な3次元位置情報の生成を行う構成を実現する。
【解決手段】カメラによる撮影画像を観測データとして入力し、特徴点位置情報を含む多次元正規分布データからなる状態データを更新することで特徴点の3次元位置を求める例えばSLAM処理において、3次元情報の生成対象領域を区分したサブマップを設定する。さらにサブマップに属しない特徴点に関するデータを含まないサブマップ対応の状態データを生成して、観測データに基づいてサブマップ対応状態データを更新する。本構成によれば状態データのデータ量が削減され、状態データ更新に伴う計算量を減少させることが可能であり、効率的な処理が実現される。
(もっと読む)
路面標示認識装置
【課題】従来の路面標示認識装置は、カメラでの撮影画像全体を領域分割した後、2次元平面への投影などの変換処理を行うので、CPU負荷が大きく、また、検知ライン上の明るさの変化位置に基づき路面標示を認識する計算量抑制方法は、自車両前方に他車両が位置し、路面標示の一部を隠蔽した場合、路面標示を正しく認識できない。
【解決手段】画像入力手段で得られた自車両の走行路を含む所定領域を撮影した画像中の、部分領域を監視領域とし監視領域設定手段で設定し、監視領域から、画像特徴を画像特徴抽出手段で抽出し、この特徴抽出手段で得られた特徴と、路面標示モデル記憶手段に予め格納されている路面標示モデルとをHMMを用いてHMM識別手段で比較評価して路面標示の認識を行う。
(もっと読む)
顔画像処理装置およびコンピュータプログラム
【課題】顔の特徴データの登録の手間を軽減し、入力ソースに含まれていない頭部姿勢についても容易に登録する。
【解決手段】顔領域検出照合部は、映像データの各フレームから特徴点二次元座標値を推定する。位置・姿勢推定部は、特徴点二次元座標値と三次元顔メッシュモデルにおける特徴点に対応する特徴点頂点三次元座標値とに基づいて、特徴点三次元座標値と頭部姿勢とを推定する。メッシュワーピング部は、特徴点三次元座標値に、三次元顔メッシュモデルのメッシュ頂点三次元座標値をワーピングさせる。テクスチャマッピング部は、修正三次元顔モデルに、映像データのテクスチャを、UVテクスチャ画像を用いてマッピングする。レンダリング部は、頭部姿勢を変位させてレンダリング処理を行う。データベース登録部は、レンダリング結果に基づいて特徴点に対応する顔特徴データを生成して登録する。
(もっと読む)
マーカ生成装置、マーカ生成検出システム、マーカ生成検出装置、マーカ、マーカ生成方法及びプログラム
【課題】 マーカパターンの頑健性の低下を抑制しつつ、最適なマーカパターンを安定的に生成可能とする。
【解決手段】 複数の画像を入力する映像入力手段10と、複数の画像ごとに特徴点を抽出し、これらの抽出した特徴点を所定の空間に表す配置手段20と、空間における特徴点が所定数以下の部分を特異特徴として選択する特異特徴選択手段40と、特異特徴を用いてマーカを生成するマーカ生成手段50と、複数の画像への出現頻度が低い物又は物の状態を低出現物体として検出する動体検出手段30とを備え、特異特徴選択手段40が、低出現物体に対応する特徴点が排除された所定の空間から特異特徴を選択する。
(もっと読む)
基準画像に対して対象画像を補正する画像処理方法及びその画像処理装置
本発明に係る自動画像処理方法は、対象画像に適用されるマスクの適用のための自動画像処理方法であって、a)顔を表す画像であるデジタルの対象画像を取得するステップ(300)と、b)前記対象画像の少なくとも一つの領域について、典型的な空間的欠陥を示し得る点に少なくとも一致する参照点を自動的に特定するステップ(320)と、c)少なくとも前記領域について、前記対象画像と基準画像とを比較することにより空間的欠陥検出テストを少なくとも1回実施するステップ(335)と、d)検出された空間的欠陥に応じて、前記欠陥を含む画像の領域に適用される空間補正マスクを自動的に特定するステップ(340)と、e)前記マスクを前記対象画像における関連領域に適用するステップ(350)とを備えている。また、本発明はその画像処理システムに関する。 (もっと読む)
電子機器、ロック解除方法、プログラムおよび記録媒体
【課題】不正利用を防止する電子機器、ロック解除方法、プログラムおよび記録媒体を提供すること。
【解決手段】顔認識によってロック解除を行う際、予め選択されていた所定の表示領域に顔が表示されるように顔認識が行われた場合に、ロックを解除する。
(もっと読む)
ロボットシステムおよびロボットシステムの制御方法
【課題】ワークが撮像されたボケ画像からワークの位置を精度良く検出するロボットシステムを提供する。
【解決手段】ワークWに対して作業を実施するロボット10と、前記ワークWを載置するとともに、蛍光体マーカー74を備えたステージ72と、前記ワークWと前記蛍光体マーカー74とを所定の露光時間で撮像するカメラ20と、前記カメラ20の露光時間より短い周期で前記蛍光体マーカー74を点滅発光させるマーカー制御部45と、を備え、前記カメラ20により撮像されたボケ画像から前記蛍光体マーカー74の軌跡画像100を抽出して、前記軌跡画像100から点拡散関数を算出する点拡散関数算出部35と、算出した前記点拡散関数を用いて、前記ボケ画像を画像変換し前記ボケ画像からボケていない元画像を生成する画像生成部37と、前記元画像から前記ワークWの位置を算出する位置算出部39と、を有するロボットシステム5。
(もっと読む)
手画像認識装置
【課題】撮影された手の肌色の色調や手の背景の影響を受けることなく、伸ばした手指の本数を認識する。
【解決手段】顔とともに手指の画像を撮影して画像データを取得する画像入力部11と、その画像データにおける顔の位置を基準とした手指を認識する領域の位置を表す情報および該領域の大きさを表す情報からなる手認識領域情報を予め記憶する記憶部13と、画像データから顔を検出し、該画像データ内の顔の位置を検出する顔検出部14と、顔検出部14が検出した顔の特徴に基づいて手指の大きさの基準値を算出する制御部12と、画像データ内の顔の位置および手認識情報から手指を認識する領域を抽出し、該領域から制御部12が算出した基準値に基づいて手指を検出する指検出部15とを設けた。
(もっと読む)
プライバシー保護システム及びプライバシー保護方法
【課題】プライバシーの保護を依頼する者に不安を生じさせることなく、プライバシーの保護を依頼することを可能にする。
【解決手段】依頼装置は、個人画像中の特徴量データを秘匿状態とした第1の秘匿特徴量データを照合装置へ送信する。掲載情報提供装置は、公開画像中の特徴量データを秘匿状態とした第2の秘匿特徴量データと、当該公開画像にて特定される個人を識別する識別子とを照合装置へ送信する。そして、照合装置は、第2の秘匿特徴量データと第1の秘匿特徴量データとを秘匿状態のまま照合する。このとき、第2の秘匿特徴量データと一致する第1の秘匿特徴量データが存在すると、照合装置は、その第2の秘匿特徴量データの識別子を掲載情報提供装置へ送信する。そして、掲載情報提供装置は、受信した識別子によって識別される個人のプライバシーを保護するための依頼を通知する。
(もっと読む)
画像形成装置
【課題】カラー画像のデータをモノクロ画像のデータに変換する場合に、変換後のモノクロ画像についてその画質の向上を図れる画像形成装置を提供すること。
【解決手段】カラー原稿の1ページのカラー画像に、同じY色同士のマーキング81と電子透かし情報としてのドットパターン82とを示す画像部分が含まれており、このカラー画像をブラック色のモノクロ画像に変換してコピー出力する場合、マーキング81の方がドットパターン82よりも濃度が濃くなるように変換する。変換後のドットパターン92を人の目の視感度に合うように濃度の淡いパターンにすることができ、マーキング91を人の注意を引き易いように濃度の濃いマーキングにすることができる。
(もっと読む)
視覚に基づく3次元形状認識を備えたロボット
【課題】2次元(2D)の視覚信号から、対象物の3次元(3D)形状を認識する。
【解決手段】ビデオ信号において表される対象物について、3D形状の情報を抽出するため、ビデオセンサからの該ビデオ信号を処理するための方法であって、対象物が、3D形状空間において格納されるメモリを提供するステップであって、該形状空間は、該対象物の3D形状の特性をコード化する抽象特徴空間である、ステップと、対象物の2Dのビデオ信号の表現を、前記形状空間にマッピングするステップであって、該形状空間における対象物の座標は、該対象物の3D形状および(または)物理的特性を示す、ステップと、を含む。
(もっと読む)
メーキャップシミュレーション装置、メーキャップシミュレーションプログラム及び対面販売支援方法
【課題】メーキャップに関係する商品の販売へ効率的に繋がるように対面販売を支援するメーキャップシミュレーション装置、メーキャップシミュレーションプログラム及び対面販売支援方法を提供することを目的とする。
【解決手段】対面販売を支援するメーキャップシミュレーション装置1であって、ユーザの顔を撮影する撮影手段14と、撮影したユーザの顔の画像からユーザの顔の顔立ち分析及び肌色分析を行う分析手段と、ユーザの顔の顔立ち分析及び肌色分析の結果を表示する分析結果表示手段と、ユーザの顔の顔立ち分析及び肌色分析の結果に基づき、ユーザの顔の顔立ち及び肌色に合った商品の情報を表示すると共に、商品を使ってメーキャップを施したユーザの顔をシミュレーションして表示するシミュレーション画面表示手段とを有することにより上記課題を解決する。
(もっと読む)
301 - 320 / 1,510
[ Back to top ]