
Fターム[5C054CA05]の内容
閉回路テレビジョンシステム (47,623) | 線源 (1,941) | 電磁波 (1,826) | 赤外線 (449)
Fターム[5C054CA05]に分類される特許
141 - 160 / 449
車両周囲監視装置
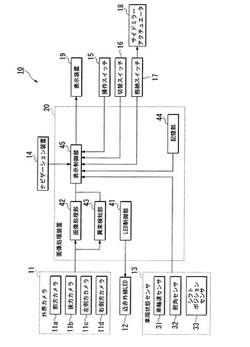
【課題】運転者に車両周囲の状況を適正に把握させる。
【解決手段】車両周囲監視装置10は、自車両の外界周辺領域を撮像して画像を出力する複数の各カメラ11a,…,11dと、各カメラ11a,…,11dの異常状態の有無を判定する異常検知部43と、各カメラ11a,…,11dから出力される画像のうちから表示装置19に表示される画像を選択して切り換え可能に表示する表示制御部45とを備え、表示制御部45は、異常検知部43により異常状態であると判定された各カメラ11a,…,11dに係る画像を表示装置19に表示することを禁止する。
(もっと読む)
電子内視鏡システム

【課題】CMOS型のイメージセンサを用いながらも、異なる照明光による観察画像を同時に観察することができる電子内視鏡システムを提供する。
【解決手段】電子内視鏡システムは、被検者の体内に挿入される挿入部にCMOS型のイメージセンサ(CMOSセンサ)が設けられているとともに、このCMOSセンサによって被検者の体内を撮像するときに、照明光の波長を、複数の波長帯で自在に切り替えられるようにした照明装置を備える。この電子内視鏡システムは、CMOSセンサの全ての画素から信号を読み出すのに要する時間を1フレーム期間とするときに、1フレーム期間ごとに照明光の波長を切り替えながら撮像するとともに、1フレーム期間のうち前半1/2フレーム期間で露光し、後半1/2フレーム期間で、照明を消灯しながら、CMOSセンサの撮像領域内の半数の画素から撮像信号を読み出して観察画像を得る。
(もっと読む)
画像処理装置
【課題】夜間等に高輝度目標があっても1台のカメラによりハレーションを起こさずに当該目標を撮像可能な画像処理装置を提供する。
【解決手段】車両に搭載され、車両周辺の画像を取得するカメラと制御部を備え、制御部において、カメラで取得した画像から車両を抽出し、カメラにより取得した車両周辺の画像中の明るさに基づき、抽出した車両及び車両近傍において、明るさを補正する領域を算出する。そして、算出した明るさを補正する領域においてハレーションを起こす明るさである部分、例えば、ヘッドライト部分、ヘッドライトの路面反射部分及びヘッドライトのフレア部分を算出し、算出したハレーションを起こす部分を、所定の低減率を乗ずることによりハレーションを起こさない明るさに補正し、補正したハレーション領域をカメラで取得した画像に重ね合わせて出力する。
(もっと読む)
画像センサ
【課題】監視領域に侵入した侵入物体を検出するとともに、監視領域内に存在する植栽の揺れによる誤報を防止できる画像センサを提供する。
【解決手段】画像センサ2は、監視領域を撮影した赤色画像を含むカラー画像と近赤外画像とを同時に取得する撮像部22と、赤色画像及び近赤外画像の各画素の輝度値から植物確信度を算出し、その植物確信度が所定の閾値以上となる画素の集合を植栽領域として抽出する植物確信度算出手段211と、監視領域のカラー画像または近赤外画像と基準画像の差分によって変化領域を抽出する変化領域抽出手段212と、変化領域について、侵入物体属性度を算出する侵入物体属性度算出手段214と、変化領域に占める植栽領域と重なった領域の割合が大きいほど高い値となる外乱属性度を算出する外乱属性度算出手段213と、侵入物体属性度及び外乱属性度に基づいて変化領域が侵入物体か否かを判定する判定手段215とを有する。
(もっと読む)
画像センサ
【課題】監視領域の明るさによらず、良好な精度で監視領域への侵入物体を検出できる画像センサを提供する。
【解決手段】画像センサ2は、監視領域を撮影したカラー画像と近赤外画像とを同時に取得する撮像部22と、カラー画像と近赤外画像の両方を用いて侵入物体を検出する明時物体検出手段213と、近赤外画像のみを用いて侵入物体を検出する暗時物体検出手段214と、監視領域の照度がカラー画像を侵入物体の検出に利用できる明るさであると判定したときは明時物体検出手段213に侵入物体を検出させ、一方、監視領域の照度がカラー画像を侵入物体の検出に利用するには不十分な明るさであると判定したときは暗時物体検出手段214に侵入物体を検出させる処理選択手段211とを有する。
(もっと読む)
車両用情報表示装置
【課題】HMDを通じて種々の情報を視覚的に提供するだけでなく、目の疲れを防止する。
【解決手段】携帯端末Mを所持した乗員がHMD30を装着しているときには、携帯端末MからIDを取得し、このIDによって乗員を間接的に特定し、このIDに関連した乗員に対応した光量が目Eに入るように、携帯端末Mのメモリに予め用意した目標照度に基づいてHMD30のレンズ32(液晶パネル40)を通過する光量が調整される。この目標照度は、携帯端末Mのメモリ92に含まれる瞳の色、性別、年齢という属性を取り込んで、これらの情報に基づいて調整した後に、調整後の目標照度に基づいてHMD30の液晶パネル30の光透過度が制御される。
(もっと読む)
車両用暗視装置
【課題】暗視映像が必要な場合には自動で表示機能を起動可能な車両用暗視装置を提供することを課題とする。
【解決手段】車両用暗視装置1であって、自車両の周辺を撮像する撮像手段11と、撮像手段11で撮像した暗視映像を表示するための表示手段20と、自車両の運転環境を検出する運転環境検出手段15,31と、運転者の運転操作を検出する運転操作検出手段13,32とを備え、運転環境検出手段15,31で検出した運転環境の変化と運転操作検出手段13,32で検出した運転操作に基づいて撮像手段11で撮像した暗視映像を表示手段20で表示する暗視映像表示機能を起動することを特徴とし、特に、運転操作が暗視映像の必要性の低い道路から必要性の高い道路へ入るための運転操作の場合に暗視映像表示機能を起動する。
(もっと読む)
情報提供方法及び情報提供システム
【課題】情報提供方法及び情報提供システムにおいて、マーカを付与された対象物の美感を損ねることなく、移動可能な対象物自体にマーカを付与し、しかもマーカを正確に検出する。
【解決手段】不可視マーカ7は、再帰性反射特性を有する透明な物質で構成される。カメラ3は、赤外光を照射するための赤外線LED31と、赤外線領域及び可視光領域の両方の周波数領域の光を撮像可能なCMOS33と、赤外線LED31を用いて対象物6に可視光下で赤外光を照射した状態で、可視光と赤外光の下での画像(以下、可視赤外画像という)をCMOS33により撮像する処理と、赤外光を照射しないで、可視光のみの下における画像(以下、可視画像という)を撮像する処理とを実行するように制御するFPGA34とを有する。ウェアラブルコンピュータ5は、可視赤外画像と可視画像との差分画像を生成して、この差分画像に含まれる不可視マーカ7を検出する。
(もっと読む)
運転状態監視装置
【課題】車両の走行環境の変化に伴い明るさが大きく変化した場合であっても、運転者の顔画像からの特徴点の抽出が可能な運転状態監視装置を提供する。
【解決手段】運転状態監視装置1は、撮像器10により撮像して得られた運転者の顔画像を取得する画像取得部11と、取得した顔画像を複数の領域に分割する画像分割部12と、顔画像の各領域の平均輝度が所定の輝度値に近づくように、領域に含まれる画素の輝度値を領域毎に補正する画像補正部13とを備える。画像補正部13は、領域毎に輝度値の補正を行うので、それぞれの領域の明るさに応じて適切に補正できる。また、この補正により、各領域の画素の輝度値を画像解析の可能な一定の範囲内に収束させることができる。
(もっと読む)
車両用表示装置
【課題】車両の運転安全性を確保する車両用表示装置を提供すること。
【解決手段】画像表示モニタ10は、その画面11において、車両の外界を撮像してなる外界画像12の周囲に、車両の運転に必要な情報画像16として車両の状態値を指示する指示画像160,162,164を表示する。画像制御回路40は、外界画像12において注意の必要な注意対象体の像12aを検出する。画像表示モニタ10の画面11における表示を共同して制御する画像制御回路40及び駆動制御回路70は、注意対象体の像12aが検出された場合に、指示画像160,162,164において目盛160a,162a,164aが並ぶ目盛領域160b,162b,164bの表示状態を変化させることにより、当該注意対象体の存在を報知する。
(もっと読む)
工事現場防犯システム
【課題】誤報の発生を減少させることができる工事現場防犯システムを提供する。
【解決手段】赤外線を点滅発光可能な赤外線発光部24aと赤外線発光部に隣接して設けられ赤外線を受光する赤外線撮像部24bとを備える赤外線撮像ユニット24と、所定の検出エリアで物体の侵入を検出して検出信号を出力する侵入検出部25と、前記侵入検出部からの検出信号を受信した場合に赤外線発光部を間欠的に発光させると共に前記赤外線撮像部の撮像を行い、赤外線撮像部24bによって撮像された複数の画像について、前記赤外線発光部24aが点灯しているタイミングで撮像された点灯画像と前記赤外線発光部が消灯しているタイミングで撮像された消灯画像との差分によって、検出された物体が再帰性反射材11を含む装着部材10を装着しているか否かを判断する。
(もっと読む)
画像処理装置及び画像処理方法
【課題】発光部を有さない検出対象を精度良く撮像画像から検出することを可能とする画像処理装置及び画像処理方法を提供する。
【解決手段】画像処理装置の制御部は、遠赤外線波長帯にて撮像する撮像装置から得られる画像データから抽出される検出対象領域の候補と、可視光波長帯にて撮像する撮像装置から得られる画像データから抽出される高輝度領域とを比較する。高輝度領域と重複する検出対象領域の候補全体が候補から除外される。高輝度領域部分のみ除外されるのではなく、夜間に視認が困難な、発光部を有していない検出対象、つまり人物又は無灯火の自転車などが遠赤外線画像データに基づいて精度よく検出される。
(もっと読む)
車両周辺監視装置
【課題】対象物の種類に鑑みて、車両に搭載されている機器の動作を適当に制御することができる車両周辺監視装置を提供する。
【解決手段】本発明の車両周辺監視装置によれば、車両の前方に第1の接触判定領域が設定され、第1の対象物領域を基準として第2の対象物領域が存在する側に移動推定領域が設定され、第1の接触判定領域に移動推定領域の少なくとも一部が重なるか否かが判定される。四足動物が移動する方向は、胴部に対して頭部が存在している側である可能性が高いことに鑑みて、四足動物が移動する方向に設けられる移動推定領域の少なくとも一部が第1の接触判定領域に重なれば、車両と対象物とが接触する可能性が高い。一方、四足動物が移動する方向に設けられる移動推定領域が第1の接触判定領域に重ならなければ車両と四足動物との接触可能性は低い。したがって、前記のような判定手法により車両と四足動物が接触する可能性を高精度で判定することができる。
(もっと読む)
運転支援装置
【課題】障害物が検知されたとき、現在ディスプレイに表示されている画像から、検知された位置に対応する撮影手段による画像へ、視点が連続的に移動するように画像を切り替える運転支援装置を提供する。
【解決手段】車両(70)の周囲を異なる視点位置で撮影する複数の撮影手段(10)と、撮影された画像を表示する表示手段(20)と、画像の視点位置が仮想的に一の撮影手段(10L)の視点位置から隣接する他の撮影手段(10B)の視点位置へ連続的な移動をするように、画像を変形させて移行させる切替手段(30)と、車両の周囲の物体を検知する検知手段(40)と、検知手段が車両の周囲に物体(81)を検知し、一の撮影手段(10L)が撮影した画像に物体(81)が含まれないとき、隣接する他の撮影手段(10B)の画像を経由して、物体が撮影された撮影手段(10R)の画像へ、と画像移行を行わせる制御手段(50)と、を備える。
(もっと読む)
車両周辺画像の切替装置
【課題】運転者が所定のスイッチを1回だけ押せば所望の画像が表示されるように、環境状態または/および走行状態に応じて複数の画像の切替優先順位を決定することができる車両周辺画像の切替装置を提供する。
【解決手段】複数の撮影手段(20)によって撮影された自車の周辺の画像を切り替えて表示手段(30)に表示させる切替手段(12)と、前記切替手段(12)へ表示の切替信号を送る切替スイッチ(13)と、環境状態検出手段(40)から取得された前記自車の周辺の環境状態、または/および、走行状態検出手段(50)から取得された前記自車の走行状態、に基づいて、表示させる前記画像の優先度を変更する変更手段(11)と、を備え、前記切替手段(12)は、切替スイッチ(13)から信号を受けたときに、前記優先度の順位に従って、順次前記画像を切り替える周辺画像切替装置(10)を提供する。
(もっと読む)
赤外線撮像装置および赤外線撮像方法
【課題】監視領域内の全体像と共に、所望の距離に存在する対象物の画像を選択的に撮像する。
【解決手段】監視領域内に存在する物体から発せられる赤外線を第1の検知素子131で受光し、この赤外線を光電変換して電気信号を出力する第1の赤外線検知器13と、この電気信号を変換し、赤外線受光画像用信号を生成する第1の信号処理器15Aと、第1の赤外線検知器13に係る赤外線と異なる波長の赤外パルスレーザ光を生成し、監視領域内へ照射するレーザ照射器12と、物体から赤外パルスレーザ光の反射光を第2の検知素子141で逐次受光し、この反射光を光電変換して電気信号を出力する第2の赤外線検知器14と、この電気信号を変換し、赤外線反射画像用信号を生成する第2の信号処理器15Bと、を備え、複数の第1の検知素子131および第2の検知素子141は外表面に市松状で配置されている。
(もっと読む)
画像処理装置および画像処理方法
【課題】運転者の脇見判断の基準となる閾値を車両の走行状態に応じて設定し、より正確な脇見判断をすることができる、画像処理装置および画像処理方法を提供する。
【解決手段】画像処理ECU3は、ドライバーの顔向き角度θを算出し、車両制御システム4に出力する。さらに、画像処理ECU3は、ドライバーの顔向きは正常であるか否かの判断の基準となる閾値の角度Θを上記車両の車両情報とに基づいて変更し、変更後の閾値Θ’を車両制御システム4に出力する。車両制御システム4は、画像処理ECU3から出力された顔向き角度θおよび閾値Θ’に基づいてドライバーの顔向きは正常であるか否かの判断を行う。
(もっと読む)
車両周辺監視装置
【課題】車両に搭載された撮影手段によって動物を追跡中にオクルージョンが発生した場合に、オクルージョン発生中の当該動物の位置を高精度で補完することができる車両周辺監視装置を提供する。
【解決手段】撮像画像から対象物の画像領域を抽出する対象物抽出手段と、前記対象物抽出手段により抽出された前記画像領域の対象物が胴部の左右いずれかの側に頭部が存在する指定動物であるか否かを判定する動物判定手段と、前記撮像画像における前記対象物の追跡中に、前記撮像画像から前記対象物が消失するオクルージョンが発生したか否かを判定するオクルージョン判定手段と、前記オクルージョンが発生する前の前記撮像画像から抽出された前記指定動物の位置及び胴部に対する頭部の位置に基づいて、前記オクルージョン発生中の前記指定動物の位置を補完する位置補完手段とを備えることを特徴とする。
(もっと読む)
表示装置
【課題】撮像手段からの映像信号が異常な場合に、これを表す画像を表示する表示装置において、この情報を記憶しておくと共に、撮像手段の作動オフ時に、この情報を誤って記憶させない。
【解決手段】表示装置1は、撮影映像の映像信号Saを出力する撮像手段20と、映像信号Saを変換映像信号Sdに変換すると共に、映像信号Saが異常か否かを判定し、映像信号Saが異常な場合に異常画像信号Sbと変換映像信号Sdの両出力を禁止し、映像信号Saが正常な場合に変換映像信号Sdを出力する映像変換手段3と、撮像手段20が作動している場合に映像変換手段3からの変換映像信号Sdの出力有無を判定する判定手段4と、出力無し判定の場合に出力無し判定の情報を記憶する記憶手段6と、出力無し判定の場合に異常画像信号Sbを出力する信号出力手段と、異常画像信号Sbが入力されて異常画像を表示する表示手段と、を備える。
(もっと読む)
赤外線撮像装置
【課題】侵入物体を検出した場合に、赤外線撮像装置のキャリブレーション動作が動作すると、監視映像を取得できない。
【解決手段】監視領域を撮像する赤外線撮像装置において、視野範囲内の赤外線光を入射し映像信号に変換する赤外線検知素子と、赤外線検知素子が出力する映像信号を補正するキャリブレーション制御回路であって、所定の周期若しくは指定された時に赤外線検知素子のキャリブレーション動作を行うキャリブレーション制御回路とを備え、キャリブレーション制御回路は、映像信号を画像処理し侵入物体を検出する画像処理装置から、映像信号に侵入物体が検出された場合の信号若しくは情報を得た場合には、赤外線検知素子のキャリブレーション動作を停止する。
(もっと読む)
141 - 160 / 449
[ Back to top ]