
Fターム[5C054FC07]の内容
閉回路テレビジョンシステム (47,623) | 映像解析処理 (5,931) | 色度解析 (165)
Fターム[5C054FC07]の下位に属するFターム
Fターム[5C054FC07]に分類される特許
21 - 40 / 107
信号灯識別プログラムおよび信号灯識別装置
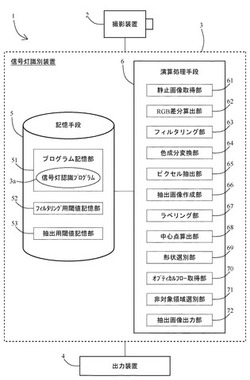
【課題】 識別用のテンプレートデータ等を予め用意する必要がなく、また天候や時間帯等に関わらず、高精度かつリアルタイムに撮影画像内の信号灯を識別することができる信号灯識別プログラムおよび信号灯識別装置を提供する。
【解決手段】 信号灯識別装置3を、静止画像取得部61と、静止画像を構成する各ピクセルのRGB成分をHSV成分に変換する色成分変換部64と、信号灯に相当する色相、彩度および明度のピクセルを抽出するための色相範囲、彩度範囲および明度範囲を定める閾値を記憶する抽出用閾値記憶部53と、色成分変換部64が変換した色相、彩度および明度が色相範囲、彩度範囲、および明度範囲内にあるピクセルを抽出するピクセル抽出部65と、抽出画像を出力装置4へ出力する抽出画像出力部72として機能させる。
(もっと読む)
車両監視装置

【課題】センタ装置及び路上装置のハード構成を複雑化することなく、センタ装置側において監視対象車両の映像を一時的に参照できるようにする。
【解決手段】通常時は、路上装置2−1〜2−Nからセンタ装置1に、車両情報及びナンバープレート情報を伝送する。センタ装置1から監視カメラ21の撮影映像の伝送が求められた場合は、路上装置2−1〜2−Nからセンタ装置1に、監視カメラ21の撮影映像を直接伝送し、センタ装置1に備えられた表示モニタ14に表示する。また、センタ装置1に備えられたデータ検索部11が、路上装置2−1〜2−Nから伝送された監視カメラ21の撮影映像から、ナンバープレート情報を読み出す。
(もっと読む)
動き検出装置
【課題】動き検出の精度を向上させることが可能な動き検出装置を提供すること。
【解決手段】色分離回路41は、入力された映像のRGBデータを色信号に分離する。分割ウィンドウ積算処理回路42は、画面全体を分割した複数のウィンドウのそれぞれに対して色信号レベル検波を行ない、積算パラメータを算出する。減算処理回路24は、分割ウィンドウ積算処理回路42によって算出されたウィンドウごとの積算パラメータの中から、指定されたウィンドウの積算パラメータについて、最新フレームの積算パラメータと1フレーム前の積算パラメータとの減算を行なう。そして、比較器27は、減算処理回路24による減算結果と予め定められた閾値とを比較し、指定されたウィンドウごとに動きがあるか否かを判定する。したがって、動き検出の精度を向上させることが可能となる。
(もっと読む)
カメラ付インターホン装置
【課題】 撮像素子のばらつき等で肌色が変化することがなく、更に光源状況に応じて肌色補正を行なうカメラ付インターホン装置を提供する。
【解決手段】 玄関子機1は、カメラ14の撮像映像から人物の顔を認識するための顔認識部15aと、顔認識部15aで認識した顔エリアの色情報を基に、モニタに表示する肌色を補正する色補正部15bと、オートホワイトバランスの青色ゲインと赤色の色差ゲインとの対応データ、及び青色ゲインと黄色の色差ゲインとの対応データを記憶した記憶部17とを有し、色補正部15bは顔認識部15aが認識した顔エリアのR−Y、B−Yの色差信号を求め、予め設定した特定の色差信号レベルに近づける補正を実施し、その後記憶部17に記憶したデータを基に赤色の色差ゲインの増減を行うと共に黄色の色差ゲインの増減を行い赤色及び黄色を補正する。
(もっと読む)
画像認識処理に適用する特徴情報選択装置及び画像認識処理装置
【課題】環境条件の変動がある場合でも人の追跡、同定を確実に実現できる画像認識処理に有効な特徴情報を選択できる特徴情報選択装置を提供することにある。
【解決手段】カメラ11A〜11Cにより撮影された画像情報から認識対象を抽出するための特徴情報を選択する特徴情報選択装置を含む画像処理装置10において、重要度情報及び信頼度情報に基づいて複数の特徴情報から画像認識処理に有効な特徴情報を選択する機能を有する構成である。
(もっと読む)
カラーテレビドアホン装置
【課題】住宅に設置されるカラーテレビドアホン装置に係わり、玄関子機のカメラで撮像される映像信号のホワイトバランスを行うカラーテレビドアホン装置。
【解決手段】来訪者を撮像するカメラを備えた玄関子機と、カメラで撮像された映像を出力するモニタを備えた居室親機で構成されたカラーテレビドアホン装置において、玄関子機には、カメラで撮像した映像信号から光源光の色温度を検出する光源光色温度検出部と、光源光色温度検出部にて算出された光源光色温度信号を送出制御する子機CPUと、居室親機には、光源光色温度信号を元にして、カメラで撮像した白色を忠実に再現させる為にモニタ固有の白色補正係数を算出する色補正算出部と、白色補正係数を映像信号からデコードされたRGB原色信号に乗算することによって、カメラで撮像した映像を忠実に再現させる映像処理部を備えた。
(もっと読む)
不審物検知装置
【課題】不審物が当該不審物と似た色の背景部分に放置されても背景物と誤判定しない不審物検知装置を提供すること。
【解決手段】画素相違度算出手段41は撮像部2から入力された入力画像と背景画像30を画素ごとに比較して画素相違度を算出し、静止物領域検出手段42は第1閾値を超える画素相違度が所定時間以上算出され続けた画素のまとまりを静止物領域として検出し、強変化部分検出手段43は第1閾値より高く設定された第2閾値を超える画素相違度が算出された画素を強変化部分として検出し、不審物判定手段44は静止物領域内の強変化部分における入力画像の輝度分布と当該強変化部分における背景画像30の輝度分布を比較し、2つの輝度分布が相違する場合に当該静止物領域に不審物の存在を判定する。
強変化部分の輝度分布を比較することで背景画像に対する入力画像中の背景物と不審物の違いが強調され、検知精度が向上する。
(もっと読む)
撮像装置及びその制御方法、並びにプログラム
【課題】撮影条件によらず、画面内において被写体を正確に追尾することができる撮像装置を提供する。
【解決手段】露光時間が長い時と同様に、ゲインが大きくノイズが増える時や、フレームレートが低くブレが発生しやすい時、またカメラがブレている時にも輝度情報を用いた追尾の精度は低下する。そのような場合に、精度の落ちる輝度情報を用いた追尾ではなく、色情報を用いて追尾する。即ち、ゲインやフレームレート、ブレ量といった撮影時の撮影条件を検出し、検出された撮影条件に応じて、輝度情報を用いた追尾処理と色情報を用いた追尾処理を切り替える。
(もっと読む)
電子カメラ
【課題】 追尾対象の指定時におけるユーザの煩雑さを軽減した被写体追尾機能を有する電子カメラを提供する。
【解決手段】 電子カメラは、撮像部と、特定被写体検出部と、テンプレート生成部と、被写体追尾部とを備える。撮像部は、被写体の像を撮像して撮像画像を取得する。特定被写体検出部は、撮像画像から特定被写体を検出する。テンプレート生成部は、撮像画像のうちで特定被写体に対応する部分画像を用いて、追尾対象の特徴を示すテンプレートを生成する。被写体追尾部は、テンプレートを用いたマッチング処理によって、テンプレート生成後に時系列に取得される複数の撮像画像から追尾対象を継続的に検出する。
(もっと読む)
監視システム、撮像装置、解析装置及び監視方法
【課題】撮像装置を有する監視システムにおいて解析処理を効率的に実行させることが可能な監視システム、撮像装置、解析装置及び監視方法を提供すること。
【解決手段】被写体を撮影する撮像部から入力された画像データに基づいて解析処理をして第1のメタデータを生成する基礎解析部104と、第1のメタデータ及び第1のメタデータと異なる第2のメタデータを、ネットワークを介してネットワークに接続された監視装置に出力する第1メタデータ出力部114とを有する撮像装置100と、撮像装置から受けた画像データに基づいて基礎解析部と異なる解析処理をして第2のメタデータを生成する拡張解析部と、第2のメタデータを撮像装置に出力する第2メタデータ出力部とを有する解析装置130とを備えることを特徴とする。
(もっと読む)
目標追尾装置
【課題】追尾対象物が複数の色を含んでいる場合にも精度の高い追尾処理を行えるようにする。
【解決手段】時系列的に取り込まれる画像データ中の目標物体を追尾する目標追尾装置であって、画像データ中における目標物体となる追尾対象の指定を受け付ける追尾対象物指定受付部と、指定された追尾対象に係る画像データ中の複数の色を目標色として設定する目標色設定部と、所定の規則にしたがって画像データにおける所定画像単位内を移動する複数のパーティクルを用いて、パーティクル周辺の色と目標色との比較によって求められる色尤度の測定を複数の目標色毎に行ない、その測定結果に基づいて目標色毎の分布領域を推定し、推定された目標色毎の分布領域の重なり具合に基づいて、測定された色尤度を補正し、補正された色尤度に基づいて画像データ中の追尾対象の領域を推定するパーティクルフィルタ処理部とを備えた目標追尾装置。
(もっと読む)
内視鏡画像処理装置および方法ならびにプログラム
【課題】分光推定画像による画像診断の作業効率を向上させる。
【解決手段】内視鏡画像Pから注目領域ROIおよび参照領域RORが検出される。次に、注目領域ROIと参照領域RORとのスペクトル分布が推定され、注目領域ROIと参照領域RORと色差ΔEが最大になるような波長セット(λr、λg、λb)が検出される。そして、演算手段70において、検出した波長セット(λr、λg、λb)に該当するマトリクスパラメータMがパラメータデータベースDBから抽出され、マトリクス演算されることにより分光推定画像SPが生成される。
(もっと読む)
画像処理システム
【課題】車載ネットワーク上に車載カメラおよび複数の画像認識部が接続された画像処理システムにおいて、画像認識部が画像認識処理をするための前処理を省くことが可能となる技術を提供する。
【解決手段】画像処理システムにおいて、車載ネットワーク上の車載カメラは画素値がRGB表色系で表される画像を撮影する。主成分算出部は撮影したフレーム画像に対して主成分分析を行い、変換行列を求める。画素値変換部は変換行列と各画素のRGB画素値から第1〜第3主成分得点を取得し、少なくとも第1主成分得点を車載ネットワークに配信する。画像認識部はコントラストが強調された第1主成分得点に基づいて画像認識を行い、必要な後続処理を実行する。
(もっと読む)
内視鏡画像処理装置および方法ならびにプログラム
【課題】実際の被写体の分光反射率を精度良く分光推定画像に表す。
【解決手段】色毎に異なるパラメータセットを記憶したパラメータデータベースDBを用意しておく。内視鏡画像Pの画像データ(画素もしくは所定の領域)の色に基づいて色度座標(x、y)が色として判別される。その後、判別した色度座標(x、y)に基づいてマトリクス演算に用いるパラメータセットMPS1〜MPS6のいずれかが選択される。そして、選択したパラメータセットSMPSを用いて分光推定画像SPが生成される。
(もっと読む)
画像監視装置
【課題】在室者の安否判定を取りこぼしなく行うことができ、画像処理のみで安否判定できて導入容易な画像監視装置の提供。
【解決手段】地震検知手段220により地震が検知されるまでは人物特徴抽出手段221により検知前画像から在室者の人物特徴212が抽出及び登録され、地震検知手段220により地震が検知されると人物特徴抽出手段221は動作を停止する。そして、地震検知手段220により地震の終了が検知されると、被災判定手段222が動作して被災の有無を判定するとともに、安否判定手段223が動作開始し、安否判定期間が設定されて安否判定処理が始まる。安否判定手段223は、安否判定期間中、検知後画像における人物特徴212の存否を確認し、安否判定期間が満了すると、存否の確認結果を統合して各人物の安否を判定する。その後、処理は再び地震検知前の段階に戻る。
(もっと読む)
監視システム及び監視方法
【課題】カメラの映像を利用した簡易な画像認証で効果的なエリアセキュリティの確保を実現できる監視システムを提供することにある。
【解決手段】カメラ12a,12bにより撮影された映像からセキュリティ用識別情報として特徴量情報を取得し、この特徴量情報をエリアセキュリティの認証処理に利用する監視システム1である。監視システム1は、特徴量情報に基づいて指定のエリアでのエリアセキュリティを判定する。
(もっと読む)
描画装置
【課題】利用者が表示されている枠図形にとらわれることなく、障害物を認識できる描画装置を提供する。
【解決手段】撮像装置が取り込む車両の周囲画像を処理して、表示装置で表示される画像を作成する描画装置であって、撮像装置から取得した画像を車両の上方にある仮想視点から見た画像に変換する視点変換処理部と、視点変換処理された画像から画像認識により駐車枠を検知する駐車枠認識部と、検知された駐車枠の確からしさを表すスコアを算出する認識結果評価部と、算出されたスコアに基づいて、駐車枠を示す枠図形を作成する枠図形作成部と、作成された枠図形を、視点変換された画像に合成する画像合成部とを備える。
(もっと読む)
撮像装置およびテレビドアホン装置
【課題】撮像装置およびテレビドアホン装置に関し、暗い場所で被写体のカラーの撮像画像を得る場合であっても、撮影時に被写体にとって照明される光が眩しくないようにすることを目的とする。
【解決手段】撮像装置9は、被写体を照明する撮影用赤外光源部9aと、被写体を照明する撮影用可視光源部9bと、被写体を撮影する撮像部9cとを備え、撮像部9cは撮影用赤外光源部9aからの赤外光と撮影用可視光源部9bからの可視光とが併用照明された被写体を撮影すると共に被写体を撮影して得た複数の色成分と赤外成分とに基づいてカラー映像信号を出力する。
(もっと読む)
目標追尾装置
【課題】追尾対象物の見かけ上の色が変化した場合にも精度の高い追尾処理を行えるようにする。
【解決手段】時系列的に取り込まれる画像データ中の目標物体を追尾する目標追尾装置であって、追尾対象の指定を受け付ける追尾対象物指定受付部と、指定された追尾対象の色を目標色として設定する目標色設定部と、パーティクルを用いて、パーティクル周辺の色と目標色との比較によって求められる色尤度の測定を行ない、色尤度が所定の基準を満たす場合には、その測定結果に基づいて画像データ中の追尾対象の領域を推定する一方、色尤度が所定の基準を満たさない場合には、パーティクルを用いて、時間差のある画像データ間の輝度差分によって求められる輝度尤度の測定を行ない、その測定結果に基づいて画像データ中の追尾対象の領域を推定し、推定された領域中の色で目標色を更新するパーティクルフィルタ処理部を備える。
(もっと読む)
階層的外観モデルを用いた監視方法及び監視装置
【課題】階層的外観モデルを用いた物体を識別する監視方法及び監視装置を提供する。
【解決手段】物体の識別は、物体の画像に含まれる特徴量から構築した、複数の階層を備え且つ各階層がそれぞれの階層に対応した精細度の1つまたは複数の特徴量を含むノードからなる階層的外観モデルを使用し、取得した物体の画像に含まれる特徴量を、対応する精細度の階層に含ませて階層的外観モデルを構築する構築ステップと、当該構築した階層的外観モデルから、不審物体を識別するための、当該ノードが属する階層に対応した精細度の特徴量を抽出する抽出ステップと、当該抽出した特徴量と、当該物体特徴量プール内に保存されている複数の物体の階層的外観モデルの特徴量とを比較する比較ステップと、当該比較した階層的外観モデルの特徴量から、不審物体を識別する識別ステップとを備える。
(もっと読む)
21 - 40 / 107
[ Back to top ]