
Fターム[5C054GB15]の内容
閉回路テレビジョンシステム (47,623) | 記録内容 (2,580) | 資料映像 (641) | 解析画像 (124)
Fターム[5C054GB15]に分類される特許
41 - 60 / 124
画像処理装置、画像処理システム、カメラ装置、画像処理方法、およびプログラム
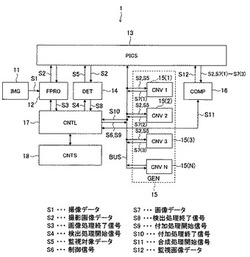
【課題】入力画像から動体、不動体にかかわらず複数の対象を検出することが可能で、異なる要求に対して対応することが可能な画像処理装置、画像処理システム、カメラ装置、画像処理方法、およびプログラムを提供する。
【解決手段】画像処理装置は、一の入力画像から複数の対象を種類別に検出する検出部14と、検出部14によって検出された対象毎の画像データを対象の種類別に、それぞれ異なる画枠の画像として生成する生成部15と、生成部で生成された異なる画枠の画像に対して設定または要求に応じた処理を行う処理部16〜19とを有する。
(もっと読む)
管内壁面画像展開システム

【課題】作業者が管状物の展開画像を立体的に認識することが可能な管内壁面画像展開システムを提供することを目的とする。
【解決手段】本発明に係る管内壁面画像展開システム50によれば、画像データSvpに対し視点の異なる2つの第1サンプリング位置Pa、第2サンプリング位置Pbで第1画像データSPa、第2画像データSPbをサンプリングし2つの第1展開画像Sfa、第2展開画像Sfbを作成する。そして、同一位置の第1展開画像Sfa、第2展開画像Sfbを左右に並べて表示することで、作業者は第1展開画像Sfa、第2展開画像Sfbを一つの立体的な展開画像として認識することができる。
(もっと読む)
計測マップ生成装置及び走行環境確認装置
【課題】歪曲のある広角画像からリアルタイムに世界座標系の座標値を得ること。
【解決手段】 座標関係式20とそれぞれのパラメーターとを使用して、広角画像10の画像座標値[Ud, Vd]を歪曲平面座標値[Xcd, Ycd]に変換する歪曲平面化処理30と、前記歪曲平面座標値[Xcd, Ycd]を理想平面座標値[Xcm, Ycm]に変換する理想平面化処理32と、前記理想平面座標値[Xcm, Ycm]を前記世界座標値[Xwm, Ywm, Zwm]に変換する世界座標化処理34とを備えると共に、前記各画像座標値[Ud, Vd]の前記世界座標値[Xwm, Ywm, Zwm]を前記計測マップ38として前記記憶部14に格納するマップ生成処理36を備えた。
(もっと読む)
映像監視システム
【課題】背景や環境が時々刻々と変わる環境においても、カメラ映像に出現する移動体を効率の良く検出できる映像監視システムを実現する。
【解決手段】カメラ10から取得した映像信号を基に画像データを出力する映像取得部100と、画像データから移動体の候補領域を抽出する移動体候補領域抽出部101と、候補領域が移動体のものであるか判断する移動体検出部102と、を備えた映像監視システムであって、移動体候補領域抽出部101は、画像データの明度勾配方向を量子化し、所定の時空間内の方向符号の出現頻度を表す時空間ヒストグラムを算出し、時空間ヒストグラムの統計上の時空間評価値である時空間豊富度を算出する。移動体検出部102は、時空間豊富度によって候補領域が移動体のものであるか判断する。
(もっと読む)
動線編集装置及び動線編集プログラム
【課題】同一移動体の追跡に失敗しているため削除せざるを得なかった動線データを活用して、分断された移動体の軌跡を完全なものに容易に復元できるようにする。
【解決手段】編集対象とする動線が選択されると、この選択された動線を第1の表示部で表示する。また、この動線の軌跡と同期させて、この動線に該当する移動体が検出されたカメラ画像を第2の表示部に表示する。第1の表示部に表示されている動線上の分割点指示入力を受付け、分割点指示入力を受付けると、編集対象となる動線を分割点で分割する。そして、分割された各動線のデータを動線データベースに登録する。
(もっと読む)
複数カメラ撮影画像合成システム用カメラ調整方法及び装置
【課題】複数のカメラの撮影画像により1枚の画像を合成するシステムにおいて、調整板を用いてカメラの調整をするに際して、容易に、短時間で、且つ正確に調整を行うことができる「複数カメラ撮影画像合成システム用カメラ調整方法及び装置」とする。
【解決手段】複数のカメラの画像を画像合成ラインで合成して表示するシステムにおいて、調整を行うカメラと、該調整を行うカメラの撮影画像と画像合成ラインで合成する画像を撮影する正常な他のカメラとの両カメラの撮影画像範囲について、画像合成ラインと交差するように調整板配置枠を画像表示する。その後調整板配置枠における正常なカメラの撮影画像範囲内の調整板配置枠に沿って調整板を配置し、調整を行うカメラの撮影画像範囲における調整板の画像が、所定の調整板の画像となるように、調整を行うカメラの画像に対して補正を行う補正値を演算し、補正値を用いて画像調整し、表示する。
(もっと読む)
オブジェクト検出装置及びオブジェクト検出方法
【課題】全方位動画像から人物等のオブジェクトを検出する際の処理量の削減が可能なオブジェクト検出装置及びオブジェクト検出方法を提供する。
【解決手段】画像入力部10により入力された高解像度の画像に対して、前景抽出部11が前景領域を含む矩形領域を抽出し、その抽出された矩形領域が検知サイズ設定部12に設定された設定値に合致しているかどうかを領域判定部13が判定し、合致していた場合、画像変換部14が透視投影画像に変換し、変換された透視投影画像に対して、オブジェクト検出部15がオブジェクト検出処理を行う。オブジェクトを検出すると、その後のフレーム以降は、探索範囲設定部16が設定した探索範囲を用いて、低解像度の全方位画像によりオブジェクトの追跡を行う。
(もっと読む)
車両周辺表示装置
【課題】車両周辺の視界の確保を図り、車両周辺画像作成のための処理能力を低減できる車両周辺表示装置を提供する。
【解決手段】描画回路4は、例えば、トランスミッションのシフト位置がリバースポジションにあるときに、後方画像表示領域20の車両後方画像の歪みを履歴表示領域30の画像に与え、履歴データに基づいた抽出された白線31を、後方画像表示領域20に表示されている白線21に対して連続して表示されるように履歴表示領域30に描画する。
(もっと読む)
車両検知装置、車両検知システム、車両検知装置の車両検知方法および車両検知プログラム
【課題】画像センサから見て他の車両に隠れている車両を検知できるようにすることを目的とする。
【解決手段】第1画像センサ110は交差点付近に道路の進行方向と逆向きに設置され、走行車両を正面から撮像する。第2画像センサ111は交差点付近の道路脇に道路に向けて設置され、走行車両を側方から撮像する。画像センサデータ処理部210は撮像された道路画像119を入力し、入力した道路画像119に基づいて車両情報211を生成する。座標地図部310は車両情報211に基づいて車両情報テーブル391を更新し、道路画像119に基づいて車両をプロットしたメッシュ地図データ392を更新する。追尾処理部320は車両情報211と旧車両情報テーブルとに基づいて検知漏れした車両と撮像範囲を通過した車両とを検出する。追尾処理部320は検知漏れ車両と通過車両とについて車両情報テーブル391とメッシュ地図データ392とを更新する。
(もっと読む)
映像情報提供システム
【課題】道路における事故などの事象が発生した箇所の画像情報をプライバシー保護を考慮した上で道路交通情報として出力する。
【解決手段】情報収集用路側インフラ2は、路側カメラ1による道路交通状況の撮影結果である動画情報を中央センター5へ伝送する。中央センター5の動画情報管理部6は、伝送された動画情報を管制官向け表示部7にて表示する。管制官が表示された動画情報のプライバシー保護処理決定の指示入力を行なった場合、プライバシー保護処理部12は、動画情報のプライバシー保護処理を行なう。中央センター5は、プライバシー保護処理がなされた動画情報を、施設内インフラ15内の施設内提供情報作成処理部16、または情報提供用路側インフラ19内の車載器内提供情報作成処理部20へ伝送する。
(もっと読む)
移動物体追跡装置
【課題】移動物体を追跡する際に各移動物体の特定の確度を向上させる。
【解決手段】監視画像から移動物体が存在する物体領域を抽出する物体領域抽出手段50と、物体領域内の画像と移動物体毎の画像上の特徴を表す参照画像情報との類似度に基づいて物体領域と移動物体とを対応付ける対応付け手段51と、複数の移動物体と対応付けられた物体領域を行列が形成されている行列領域とし、行列領域と対応付けられた移動物体を行列物体とし、行列領域、行列物体及び行列物体の行列への参入順序を含む行列情報を記憶部に記憶させる行列認識手段52と、行列領域から離脱した物体領域を離脱領域として検出する離脱領域検出手段510とを備え、対応付け手段51は、離脱領域検出手段510が離脱領域を検出すると、参入順序が最先の行列物体を優先して対応付ける。
(もっと読む)
車載用表示装置および表示方法
【課題】 撮像データに映された車両の同一性を容易に確認することができる「車載用表示装置および表示方法」を提供する。
【解決手段】 本発明に係る車載用表示装置10は、少なくとも自車の後方を撮像し、撮像データを出力する撮像部20と、撮像データ内の車両を認識する車両認識部30と、車両が認識されたとき当該車両の固有情報を抽出する抽出部40と、固有情報に関連付けされる識別情報を設定する検索設定部50と、撮像データを表示するとき、設定された識別情報を撮像データに合成する画像合成部70と、合成された画像をバックビューディスプレイに表示する表示制御部80とを有する。
(もっと読む)
監視画像記憶システム及び監視画像記憶システムの監視画像記憶方法
【課題】物体の置き去り・持ち去りがあった場合に、自動的に置き去り・持ち去りを検知するとともに、当該人物を自動的かつ迅速に特定するシステムを提供する。
【解決手段】エリア撮影画像情報303に基づいてエリアにおける物体の置き去り・持ち去りを検知するとともに、検知の根拠としたエリア撮影画像情報303の中のエリア撮影画像を物体検知画像132とし、物体検知画像132が撮影された時刻を物体検知時刻133として特定する物体検知部130と、物体検知時刻133より過去のディレイタイム151時間の間に撮影された顔撮影画像情報403を抽出するとともに、抽出した顔撮影画像情報403の中の顔撮影画像の中から所定の基準を満たす顔撮影画像を基準合致顔画像142として選択する顔検知部140と、物体検知画像132と物体検知時刻133と基準合致顔画像142とを対応付けて記憶装置150に記憶する統合表示アプリ部120とを備えた。
(もっと読む)
監視装置
【課題】監視対象の動態判定が迅速に行われ、しかも、監視カメラが増設・削除された場合にも柔軟に対応できる監視装置を得ることを目的とする。
【解決手段】監視対象の映像を得る撮像部101、映像から特徴部分を抽出する特徴抽出部102、特徴部分を解析して特徴量に整理する特徴識別部103、特徴量を記憶するとともに、動態監視対象の特徴量を記憶した特徴蓄積部105、所定の他の監視装置10と特徴量を通信する特徴伝送部104、自監視装置10の整理された特徴量と動態監視対象の特徴量とを照合し、かつ自監視装置10の特徴量と他の監視装置10からの特徴量とを照合して、照合結果を特徴伝送部104に出力する特徴照合部106、照合結果から、整理した特徴量と動態監視対象の特徴量とが同一か、整理した特徴量と他の監視装置10からの特徴量とが同一か否かの判断結果を出力する動態判断部107を備えたものである。
(もっと読む)
移動物体追跡装置
【課題】移動物体追跡装置において、移動物体の位置の予測精度が低下したりオクルージョンが発生した場合に、追跡が困難となり易い。
【解決手段】複数の撮像部2が互いに異なる視点から監視空間を撮影する。追跡手段50は、移動物体それぞれについて、現時刻における予測位置と単一の撮像部2との組み合わせを表した仮説406を設定する。仮説406には、組み込まれた撮像部2が異なるものが設定される。尤度算出手段504は仮説406毎に、それに組み込まれた撮像部2の監視画像の予測位置に対応する部分について、記憶部4に記憶された移動物体の画像特徴との比較を行って、当該仮説406の尤度を算出する。物体位置判定手段506は、所定値を超える尤度が得られた仮説406に基づいて、現時刻における移動物体の位置を求める。
(もっと読む)
画像処理装置および画像処理方法
【課題】被捜索者の関係者に関する情報を高い精度で表示すること。
【解決手段】人物切り出し部101は、人物領域に対して固有IDを割り当て、顔位置の画像データを切り出す。人物特定情報抽出部102は、顔位置の画像データから特徴量を抽出する。人物追跡部103は、同一人物に同一の追跡IDを割り当て、人物特定情報(固有ID、追跡IDおよび特徴量)に顔位置の画像データを対応付けて人物検索データベース104に格納する。位置情報抽出部105は、人物領域に係る人物の3次元空間上での顔位置を求める。顔向き推定部106は、顔位置の画像データの顔向きを推定する。人物間相対情報抽出部107は、人物の3次元空間上での顔位置と顔向きとを用いて人物間で向かい合っているか否かを示す属性値を割り当て、各人物の固有IDおよび属性値を紐付けて人物関連性データベース108に格納する。
(もっと読む)
対象物追跡装置及びプログラム
【課題】追跡対象物が部分的に変形する場合であっても、簡易な処理で、安定して追跡することができるようにする。
【解決手段】撮像装置12によって、自車両前方を撮像し、対象物検出部22によって、第1の撮像画像から対象物領域を検出する。特徴点抽出部24によって、第1の撮像画像について検出された対象物領域及び第2の撮像画像の各々から、複数の特徴点を抽出する。そして、対応点検索部26によって、特徴点抽出部24によって第1の撮像画像から抽出された特徴点の各々に対応する特徴点を、第2の撮像画像から各々検索する。対象物領域推定28によって、第1の撮像画像における特徴点の各々に対する、対象物領域内の中心位置までの距離、方向、及び第2の撮像画像における対応する特徴点の各々に基づいて、第2の撮像画像における対象物領域の中心位置を推定し、第2の撮像画像における対象物領域を推定する。
(もっと読む)
歩行者性別判定装置、歩行者性別判定方法、歩行者性別判定プログラムおよびその記録媒体
【課題】 撮像装置をもって多方向から撮影された画像を用いて、精度良く歩行者の性別を判定する。
【解決手段】 性別判定装置1には複数の撮像装置をもって歩行者を撮影した画像が時系列に入力されている。この性別判定装置1の歩行者領域抽出部12は、入力画像に映っている歩行者の位置の画素と、背景画像の前記歩行者に対応する位置の画素とで値の差分からシルエット画像を生成する。人物モデル構築部13は、前記シルエット画像を用いて3次元人物モデルを構築し、各関節の角度と関節間の長さをパラメータとして取得する。歩行周期切り出し部15は、前記パラメータから歩行周期を算出する。特徴量抽出部16は、歩行周期毎に切り出されたパラメータ列から肩部および腰部の関係により性別の特徴量を得る。性別判定部18は、前記特徴量をあらかじめ性別のラベルが付与された特徴量と比較して性別を判定する。
(もっと読む)
画像監視装置
【課題】監視画像に現れる対象物の像を特定する画像監視装置において、対象物の移動により構成部分間で生じる隠蔽の状態が変化し、同じ対象物か否かの判定精度が低下する。
【解決手段】対象物を複数の構成部分毎の立体形状(部分モデル)からなる物体モデル400で表す。物体モデル400を仮想的に監視空間70に配置し、物体モデル400を撮像部2の撮像面71に投影して、部分モデルが投影される部分モデル可視領域を部分モデル毎に求める。監視画像から部分モデル可視領域に対応する部分を対象物の構成部分画像として抽出する。構成部分毎にその画像特徴量に基づいて監視画像間での類似度を求め、これを対象物について統合した統合類似度を算出し対象物の特定に用いる。
(もっと読む)
画像処理システム、画像処理方法、およびプログラム
【課題】異なるカメラにより得られた各映像の中から、同じ物体が写された部分の映像を速やかに抽出することができる画像処理システムを提供すること。
【解決手段】画像処理システムは、複数の撮像装置のそれぞれにより撮像された複数の動画を取得する画像取得部と、複数の動画のそれぞれに含まれる複数の動画構成画像から、複数の特徴領域を検出する特徴領域検出部と、予め定められた値より高い相関を有する複数の特徴領域の中から、当該複数の特徴領域を代表する特徴領域ある代表特徴領域を決定する代表特徴領域決定部と、代表特徴領域を特定する情報である代表特徴領域情報を、予め定められた値より高い相関を有する複数の特徴領域を有する複数の動画構成画像に対応づけて出力する出力部とを備える。
(もっと読む)
41 - 60 / 124
[ Back to top ]