
Fターム[5C122EA65]の内容
Fターム[5C122EA65]に分類される特許
81 - 100 / 780
被写体特定装置、および被写体追尾装置
【課題】様々なシーンで画像内における被写体位置を特定する。
【解決手段】対象画像に基づいて輝度画像と色差画像とを生成する輝度画像・色差画像生成手段と、生成された輝度画像と色差画像から被写体を含む被写体領域を抽出する被写体領域抽出手段と、それぞれから抽出された被写体領域内の画素の画素値に基づいて代表値を算出する代表値算出手段と、被写体領域内の各画素の画素値から算出された代表値を減算して、それぞれに対応する差分画像を作成する差分画像生成手段と、生成された差分画像を2値化する2値化手段と、それぞれの2値化画像を合成する合成手段と、合成画像を複数に区分して、各区分画像内から白画素の塊をマスクとして抽出するマスク抽出手段と、抽出されたマスクが被写体を示すマスクである可能性を示す評価値を算出する評価値算出手段と、算出された評価値に基づいて、対象画像内における被写体を特定する被写体特定手段とを備える。
(もっと読む)
移動体画像追尾装置

【課題】付加センサを追加せず、追尾性能の劣化を改善する。
【解決手段】実施形態の移動体画像追尾装置は、駆動部、カメラセンサ、追尾誤差検出部、角度センサ、角速度センサ、第1計算部、第2計算部、補正追尾誤差検出部、生成部、および制御部を含む。追尾誤差検出部は、画像データから、移動体の視野中心からのずれ量である追尾誤差を検出する。第1計算部は、追尾誤差と角度とを用いて、移動体の位置ベクトルと速度ベクトルを計算する。第2計算部は、角度からカメラセンサの視軸ベクトルを計算する。補正追尾誤差検出部は、視軸ベクトルと位置ベクトルとの関係および速度ベクトルから、追尾誤差検出値が一定であるサンプリング期間よりも短い期間ごとに補正追尾誤差を計算する。生成部は、補正追尾誤差を使用して移動体を追尾するように駆動部を駆動する角速度指令値を生成する。制御部は、角速度指令値と角速度との差がなくなるように駆動部を制御する。
(もっと読む)
物体像探索装置
【構成】イメージャ16によって捉えられた被写界を表す探索画像データは、メモリ制御回路30によってSDRAM32の探索画像エリア32cに取り込まれる。CPU26は、顔辞書DC_Fに収められた辞書画像に対する符合度が閾値THfaceを上回る顔画像を探索画像エリア32cに格納された探索画像データから探索し、顔枠キャラクタをLCDモニタ38に表示するキャラクタ表示処理を顔画像の探知に応答して開始する。CPU26はまた、顔画像の非探知が継続する時間をキャラクタ表示処理と並列して測定し、探知された顔画像の辞書画像に対する符合度が大きいほど増大するように閾値THtmを調整する。CPU26はさらに、顔画像の非探知が継続する時間が閾値THtmに達したときキャラクタ表示処理を終了する。
【効果】顔枠キャラクタの表示性能が向上する。
(もっと読む)
画像処理装置、画像処理方法、及びコンピュータプログラム
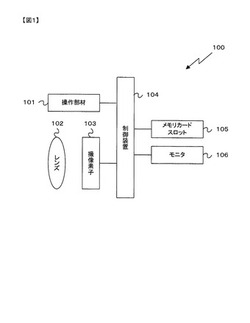
【課題】 撮影画像中の表示枠を切り出した切出し画像を生成する画像処理装置において、切出し画像を観察しているユーザに与える、表示枠の変動によるストレスを軽減できる画像処理装置を提供する。
【解決手段】 画像処理装置100は、撮影により画像を生成する画像生成部101と、画像中の移動体を囲む領域を検出枠として検出する人物検出部102と、検出枠の位置の履歴に基づいて、位置が振れないように、検出枠に対応する表示枠を決定する表示枠中心位置決定部107と、表示枠中心位置決定部107にて決定された表示枠の切出し画像を生成する切出し画像生成部110とを備えている。
(もっと読む)
撮像装置及び制御方法
【課題】 連続撮影時の連続撮影速度を低下させることなく被写体追尾を行い、フリッカーの影響を軽減した露出制御を行うことができるようにする。
【解決手段】 撮影レンズを介して入射した光束の光路を撮像手段へ導く状態へ変更する前の状態において、電荷蓄積手段により第1の蓄積を行うとともに第1の蓄積が終了した後に第2の蓄積を行い、第1の蓄積を行って得られた画像信号に基づいて所定の条件を満たす対象の追尾を行い、第1の蓄積を行って得られた画像信号及び前記第2の蓄積を行って得られた画像信号に基づいて露出制御を行う。
(もっと読む)
カメラ
【課題】演出効果が高い画像データを容易に取得することができるカメラを提供する。
【解決手段】被写体の撮像を行う撮像部8と、前記撮像部による撮影画角内に動画を投映する投映部14と、前記投映部により前記動画の投映を行いつつ前記撮像部により前記被写体の撮像を行なう撮像制御部4とを備えることを特徴とするカメラ。
(もっと読む)
撮影端末、撮影システム、サーバ、撮影サービス制御方法、およびプログラム
【課題】柔軟な撮影位置や撮影タイミングでの撮影が可能で、画像データのセキュリティ性が向上した撮影を行う撮影サービスをユーザーに提供する撮影システムを提供する、
【解決手段】撮影端末は制御部と撮影部とを有する。制御部は、撮影サービスの提供を要求する。撮影部は、撮影サービスの撮影指示を受信し、その撮影指示に基づいて画像を撮影する。
(もっと読む)
撮像装置及び制御方法
【課題】 連続撮影時の連続撮影速度を低下させることなく被写体検出の検出結果を反映させた被写体追尾を行うことができるようにする。
【解決手段】 連続撮影における前回の撮影レンズを介して入射した光束の光路を電荷蓄積手段へ導く状態において蓄積を行って得られた画像信号に基づいて被写体検出を行って得られた検出結果と、今回の撮影レンズを介して入射した光束の光路を電荷蓄積手段へ導く状態において蓄積を行って得られた画像信号と、に基づいて検出された被写体領域の追尾を行う。
(もっと読む)
情報提示装置、情報提示方法、および情報提示プログラム
【課題】ユーザの状態に応じてコンテンツ情報の提示を制御し、コンテンツ情報をユーザに分かりやすく提示する。
【解決手段】コンテンツ情報を提示する情報提示装置1であって、コンテンツ情報に関連する注釈情報および制御情報を記憶する記憶手段18と、ユーザの状態を検知するユーザ状態検知手段11と、ユーザ状態検知手段11が検知したユーザの状態に対応する制御情報を前記記憶手段18から取得し、取得した制御情報に従って注釈情報およびコンテンツ情報の提示を制御する制御手段15と、制御手段15の制御に従って注釈情報およびコンテンツ情報を提示する提示手段13と、を有する。
(もっと読む)
撮像装置、撮像方法、及び撮像プログラム
【課題】測距センサとして2次元センサを用いた場合であっても、被写体が測距センサの測距可能エリアから外れて測距不能になってしまうことを防止する。
【解決手段】撮像装置において、被写体を撮像する撮像素子を含む撮像手段と、前記撮像手段に含まれる光学系を駆動させて、前記被写体の像を前記撮像素子の受光部に入力し、前記撮像手段から得られた画像に基づいてオートフォーカス評価値を取得して合焦制御を行う合焦制御手段と、複数の2次元センサを用いて前記被写体までの距離を測定する測距手段とを有し、前記合焦制御手段は、前記被写体の位置が前記測距手段による測距可能エリア外にある場合に前記合焦制御を行うことにより、上記課題を解決する。
(もっと読む)
撮像装置および撮像方法
【課題】時系列の画像フレーム中の物体の追尾について、安定な追尾結果を得て、追尾の成功率を高める。
【解決手段】画像入力する画像入力手段と、入力した時系列の画像フレームから初期追尾対象領域の指定を受け付ける指定手段と、画像フレーム内で対象とする領域における所定の特徴量を抽出する特徴量抽出手段と、初期追尾対象領域のサイズを変化させて、該変化させた領域から抽出された特徴量が追尾を成功させる所定の条件を満たす領域を新たな初期追尾対象領域として探索する第1の探索手段と、時系列の次の画像フレームにおいて、新たな初期追尾対象領域に類似する領域を追尾結果領域として探索する第2の探索手段とを備える。
(もっと読む)
焦点検出装置、焦点調節装置および撮像装置
【課題】追尾対象の主要被写体の焦点状態を適切に検出することが可能な焦点検出装置を提供する。
【解決手段】光学系を介して撮像された撮像画像から対象とする第1の被写体に相当する第1の基準画像に対応する画像の位置を追尾する第1追尾部170と、第1の被写体と異なる第2の被写体に相当する第2の基準画像に対応する画像の位置を追尾する第2追尾部170と、撮影画面内に設定された焦点検出位置に対する焦点状態の検出を行う焦点検出部170とを備え、焦点検出部170は、第1の基準画像に対応する画像の位置が焦点検出位置に存在する場合に、第1の基準画像に対応する画像の位置における焦点状態の検出を行い、第1の基準画像に対応する画像の位置が焦点検出位置にない場合には、第2の基準画像に対応する画像の位置における焦点状態の検出を行う。
(もっと読む)
移動物体検出装置
【課題】日照変化に起因した誤検出を排除して正確な検出を行う。
【解決手段】動画を構成する第i番目の原画像P(i)を、格納部120に格納する。平均画像作成部130は、格納部140内の第(i−1)番目の平均画像A(i−1)と原画像P(i)との重みつき平均を求め、平均画像A(i)として格納部140に格納し、参照画像作成部135は、格納部145内の参照画像U(i−1)をU(i)に更新する。画像比較部は、画像P(i)と画像A(i−1)との比較および画像P(i)と画像U(i−1)との比較を画素ごとに行い、いずれも非類似とされた画素を前景画素(J=0)、他の画素を背景画素(J=1)と判定し、マスク画像Mを作成する。参照画像作成部135は、前景部分は更新せず、背景部分は平均画像A(i−1)との重みつき平均により更新して、参照画像U(i)を作成する。
(もっと読む)
画像処理装置、撮像装置およびプログラム
【課題】主要被写体を推定する。
【解決手段】画像処理装置であって、時系列で撮像された複数の画像を取得する画像取得部と、複数の画像に含まれる互いに異なる複数の被写体を抽出する被写体抽出部と、複数の被写体のそれぞれが、複数の画像のそれぞれにおいていずれの位置にあるかを判断し、複数の画像における複数の被写体それぞれの位置情報に基づいて、複数の被写体のいずれが、複数の被写体における主要被写体であるかを推定する主要被写体推定部とを備える。
(もっと読む)
撮像装置および撮像方法
【課題】主要被写体を検知できない状況に陥っても、撮像状況やユーザの意図を適切に反映したフォーカスエリアやアイリスの自動調整を行う。
【解決手段】撮像部122は、被写体を撮像して映像データを生成する。追尾部186は、映像データにおける特定された被写体を追尾する。情報生成部190は、追尾していた被写体が追尾不能となった場合、追尾不能となる前と、追尾不能となった後それぞれについて、撮像操作状態を示す撮像操作情報を生成する。焦点決定部192は、撮像操作情報に基づいて、焦点を合わせる画角内の位置を決定、または、撮像部の被写界深度を決定する。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】領域情報の変更に対するユーザの作業負担を軽減することができるようにする。
【解決手段】背景画像更新部17は、画像取得部11で取得された画像を用いて、背景画像を逐次更新し、更新された最新の背景画像と、その所定時間前の背景画像とを背景画像保存部18に保存させる。領域情報変化判定部19は、最新の背景画像と、その所定時間前の背景画像とを比較し、比較結果に応じて背景画像のなかの所定の領域を示す領域情報を更新する。本発明は、例えば、監視カメラで撮像された画像を用いた監視装置に適用できる。
(もっと読む)
画像追尾装置、画像追尾方法、およびカメラ
【課題】対象となる像の一部に対応する画像情報を含む第1基準画像情報と、第1基準画像情報に対応する画像の近傍に位置する画像の情報に基づいて設定された第2基準画像情報とに基づいて対象を認識し、認識精度を向上する。
【解決手段】画像追尾装置は、結像光学系による像を撮像して画像情報を生成する撮像装置と、画像情報に基づいて、該画像情報のうち対象となる像の一部に対応する画像情報を含む第1基準画像情報を設定するとともに、第1基準画像情報に対応する画像の近傍に位置する画像の情報に基づいて第2基準画像情報を設定する設定部と、第1基準画像情報と第2基準画像情報とに基づいて対象を認識する認識部とを備える。
(もっと読む)
画像処理装置、主被写体の選択方法及びプログラム
【課題】画像データから、類似する信号の成分を有する領域ごとに分類を行うことにより不特定被写体を検出する機能と、顔を検出する機能を備え、これら検出された顔および不特定被写体から、主被写体としてより適切な被写体を選択する画像処理装置を提供する。
【解決手段】同一被写体判定部118は、顔検出部117で検出された顔と、不特定被写体検出部116で検出された不特定被写体とが、同一の被写体であるか否かを判定する。優先順位決定部119は、顔検出部117で検出された顔と、不特定被写体検出部116で検出された不特定被写体の中から、予め定められた優先順位付けに従って主被写体を選択するものであり、同一被写体判定部118によって顔と不特定被写体が同一被写体であると判定した場合には、この優先順位付けを変更する。
(もっと読む)
画像処理装置およびその制御方法
【課題】自動的に検出された主被写体領域を追尾するにおいて追尾性能を向上する。
【解決手段】画像処理装置は、動画像のフレームからユーザの関心が高い被写体の領域である主被写体領域を検出し、その主被写体領域内の特定の位置を主被写体位置として取得する。そして、画像処理装置は、追尾処理で用いられるテンプレートを生成するための参照範囲を、取得された主被写体位置に基づいて、上記主被写体領域とは無関係に、フレームにおいて設定し、設定された参照範囲の画像情報に基づいて、主被写体位置を追尾するためのテンプレートを生成する。その後、画像処理装置は、生成したテンプレートを用いて、上記フレームに後続するフレームについて追尾処理を実行する。
(もっと読む)
侵入物体の検知を行うことができる物体追尾装置、物体追尾方法及び記憶媒体
【課題】追尾対象体が追尾されている画像データの画像フレームに侵入物体が侵入したことを検出することのできる物体追尾装置を提供する。
【解決手段】追尾対象である被写体を追尾対象体として追尾する物体追尾装置は、動画像データにおける現フレームよりも前の前フレームにおいて追尾対象体の位置を示す前フレーム対象領域又は前記現フレームにおいて追尾対象体の位置を示す現フレーム対象領域に、複数のサブ領域を設定し、当該サブ領域毎にその特徴量を求める特徴量算出部104と、特徴量が第1の閾値を超えるサブ領域が存在し、かつその数が基準値に達していなければ、現フレームにおける追尾対象体が位置する領域に、追尾対象体と異なる侵入物体が侵入したと判定する侵入物判定部105とを有し、侵入物判定部105は追尾対象体の像領域に侵入物体が侵入したか否かを判定する。
(もっと読む)
81 - 100 / 780
[ Back to top ]