
Fターム[5C122EA65]の内容
Fターム[5C122EA65]に分類される特許
41 - 60 / 780
追尾装置及び追尾方法
【課題】例えば特殊な画像処理を行う場合等の、追尾性能の劣化が生じ得る場合であっても、適切な追尾処理を行うことができる追尾装置及び追尾方法を提供すること。
【解決手段】撮影して得た画像データである第1の画像データを生成する第1の画像生成モードと、前記第1の画像データを生成すると共に前記第1の画像データに所定の処理を施した第2の画像データを生成する第2の画像生成モードと、のうち何れかの画像生成モードに設定し、画像データについて特徴情報を検出し且つ被写体の顔部位を検出するシステムコントローラ130を追尾装置に具備させる。前記システムコントローラ130は、画像データから検出した特徴情報または顔部位に基づいて、追尾対象の移動位置を演算する。前記システムコントローラ130は、第2の画像生成モードを設定した場合には、第1の画像生成モードを設定した場合に実行する演算とは異なる演算に切り換える。
(もっと読む)
撮像装置

【課題】適切な追尾処理が行われていることを視認可能な撮像装置を提供すること。
【解決手段】追尾対象の顔部を、顔検出回路1307を用いた追尾処理と、追尾処理回路1305による輝度情報を用いた追尾処理と、追尾処理回路1306による色情報を用いた追尾処理とによって追尾する。また、追尾対象の顔周辺部を、顔検出回路1307を用いた追尾処理によって検出された顔部の位置から推定して追尾するとともに、追尾処理回路1305による輝度情報を用いた追尾処理と、追尾処理回路1306による色情報を用いた追尾処理とによって追尾する。追尾対象の顏部の検出結果と追尾対象の顏周辺部の検出結果との信頼性に応じて、追尾枠の表示位置を変更する。
(もっと読む)
追尾装置及び追尾方法
【課題】顔部が非検出となったり、顔部の検出の精度が低下したりした場合であっても、以後のフレームにおける追尾精度を落とすことの無い追尾装置及び追尾方法を提供すること。
【解決手段】追尾対象の顔部を、顔検出回路1307を用いた追尾処理と、追尾処理回路1305による輝度情報を用いた追尾処理と、追尾処理回路1306による色情報を用いた追尾処理とによって追尾する。また、追尾対象の顔周辺部を、顔検出回路1307を用いた追尾処理によって検出された顔部の位置から推定して追尾するとともに、追尾処理回路1305による輝度情報を用いた追尾処理と、追尾処理回路1306による色情報を用いた追尾処理とによって追尾する。次フレームの追尾処理の開始の位置を顔検出回路1307における顔検出の結果と顔部信頼性向き判定回路1308における顔部の向きの判定結果に応じて変更する。
(もっと読む)
撮像装置、撮像方法及び撮像プログラム
【課題】 AF動作として採用される追尾領域がフレーム間で切り替わっても、AF合焦迄の遅延や偽合焦を生じることがない。
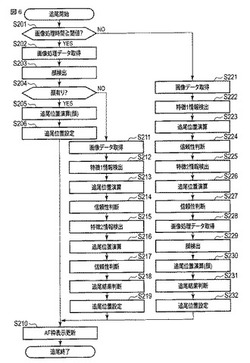
【解決手段】 撮像装置は、被写体の像を撮像部により撮像して画像データを出力し、撮像部から出力された画像データ中から顔部検出部により被写体の顔部を検出し、この顔部と被写体における顔部以外の周辺部位とに基づいて被写体を追尾し、顔部に対応する領域の第1の画像データ、又は顔部以外の周辺部位に対応する領域の第2の画像データに基づいてAF動作を行い、顔部の検出が有効な場合、顔部に対応する領域の第1の画像データに基づいてAF動作を行い、顔部が有効に検出されなくなった場合、周辺部位に対応する領域の第2の画像データに基づいてAF動作を行う。
(もっと読む)
撮像装置
【課題】AFイルミネータを使用する場合であっても、AFイルミネータの補助光の影響を受けずに被写体追尾を行うことが可能な撮像装置を提供すること。
【解決手段】被写体に対して補助光を発光する補助光発光装置141と、複数の連続する画像データに基づいて追尾領域を設定し、該追尾領域を追尾する制御を行うシステムコントローラ130と、を撮像装置100に具備させる。システムコントローラ130は、補助光発光装置が補助光を発光する前の前記追尾領域の位置、及び/または、補助光発光装置が補助光を発光する前の追尾処理に係る画像データを記憶すると共に、補助光発光装置が補助光を発光している期間においては追尾処理を停止させ、且つ、補助光発光装置が補助光を消灯した後には前記記憶した追尾領域の位置及び/または前記記憶した画像データに基づいて追尾処理を再開させる。
(もっと読む)
撮影装置、被写体追尾ズーミング方法及び被写体追尾ズーミングプログラム
【課題】撮影範囲内に収めるように確実に被写体を捉える。
【解決手段】レンズユニット12、撮像素子13を介して撮影される撮影範囲内において、制御部22により、動きのある任意の被写体を特定し、特定された被写体を追尾し、追尾した被写体が、撮影範囲内の所定の領域内に収まっているかどうかを判断し、被写体が所定の領域内に収まっていないと判断された場合に、被写体を含む撮影範囲をズームアウトするよう制御することで実現する。
(もっと読む)
撮像装置
【課題】撮影者が意図する対象に合焦された撮影画像を、容易に取得することができる撮像装置を提供する。
【解決手段】
光学系による画像を取得する画像取得部(13)と、前記画像に含まれる顔画像である第1顔画像(68)を認識する顔画像認識部(56)と、周囲環境の音声の特徴に関する第1音声情報(80)を取得する音声取得部(28)と、特定の顔画像の特徴に関する第2顔情報(72〜78)と、特定の音声の特徴に関する第2音声情報(82〜88)とを、予め互いに関連付けて記憶する記憶部(32)と、前記音声取得部で取得された前記第1音声情報と、前記記憶部に記憶された前記第2音声情報との類似性に基づき、前記第1音声情報と前記第2音声情報とを関連付ける音声判定部(54)と、前記音声判定部による関連付けの結果と、前記顔画像認識部による認識の結果とを用いて、前記光学系の合焦位置を制御する合焦位置制御部(52)と、を有する撮像装置。
(もっと読む)
撮像装置、撮像方法およびプログラム
【課題】被写体が動き回る状況下であっても、撮影者が所望する撮影の構図が定まった画像を補助的に提示することができる撮像装置、撮像方法およびプログラムを提供する。
【解決手段】連続して生成される複数の画像データにそれぞれ含まれる画像情報の変化に基づいて、時間の経過とともに画面内で移動する移動被写体を、前記移動方向に応じて定まる主要被写体の候補である主要被写体候補として検出する主要被写体候補検出部103と、主要被写体候補検出部103が検出した主要被写体候補が移動方向判定部102によって判定された移動方向に移動している場合、主要被写体候補を主要被写体として設定する主要被写体設定部104と、主要被写体設定部104が設定した主要被写体が所定の領域に位置する画像を、仮記憶された画像群から検出する画像検出部105と、を備える。
(もっと読む)
天体自動追尾撮影方法及び天体自動追尾撮影装置
【課題】非力なCPUでも、撮像エリアがその可動域を超えない範囲内で、なるべく長い撮影時間をリアルタイムかつ高精度に設定する。
【解決手段】撮像面の撮像エリア上での天体像の移動情報に基づいて、撮像エリアの所定時間あたりの光軸直交方向の理論平行移動量及び光軸と平行な軸回りの理論回転角度量を算出し、撮像エリアの可動域における、撮像エリアの基準姿勢位置からの光軸直交方向の実平行移動可能量及び光軸と平行な軸回りの実回転可能角度量を対応付けて保持する移動可能量テーブルを取得し、算出した撮像エリアの所定時間あたりの理論平行移動量及び理論回転角度量と、取得した移動可能量テーブルが保持する実平行移動可能量及び実回転可能角度量とを比較して、撮像エリアを該撮像エリアの可動域の範囲内で移動させながら天体自動追尾撮影を完了させるための撮影時間を設定する天体自動追尾撮影方法。
(もっと読む)
天体自動追尾撮影方法及び天体自動追尾撮影装置
【課題】追尾条件に応じて、無駄な演算処理を省いてCPUの負担を低減しながら、最適な駆動周期で撮像素子を駆動して天体を点像として撮影することができる天体自動追尾撮影方法及び天体自動追尾撮影装置を得る。
【解決手段】日周運動によって撮影装置に対して相対運動する天体を撮影するために、撮影装置に内蔵する所定の追尾手段を駆動させながら追尾撮影する天体自動追尾撮影方法であって、前記撮影装置の撮像素子の撮像面上に形成される天体像の、日周運動による所定時間あたりの撮像面上での移動距離を算出するステップ;及び算出した前記天体像の所定時間あたりの撮像面上での移動距離と、前記撮像素子の画素ピッチとに基づいて、前記追尾手段の駆動周期を設定するステップ;を有することを特徴とする天体自動追尾撮影方法。
(もっと読む)
天体自動追尾撮影方法及び天体自動追尾撮影装置
【課題】高価で大きく重く複雑な調整が必要な赤道儀を使用せず、高精度に制御が必要なアクチュエーターも用いず、無駄な演算処理を省いてCPUの負担を低減し、天体を見かけ上静止した状態で明るく撮影することができる天体自動追尾撮影方法及び天体自動追尾撮影装置を得る。
【解決手段】日周運動によって撮影装置に対して相対運動する天体を撮影するために、撮像素子の撮像領域の一部を電子的にトリミングしたトリミング領域を移動させながら撮影する天体自動追尾撮影方法であって、前記撮像領域上での天体像の移動情報を取得するステップ;取得した前記天体像の移動情報に基づき、前記トリミング領域の移動データを設定するステップ;及び設定した前記トリミング領域の移動データに基づいて前記トリミング領域を移動させながら、各移動後のトリミング領域上で撮影を行うステップ;を有することを特徴とする天体自動追尾撮影方法。
(もっと読む)
電子カメラ
【課題】移動する被写体を見失うことなくリアルタイムでフレーミングを行う。
【解決手段】カメラボディ11の上には、外界の視野像が透視されるシースルー表示部16が設けられている。外界像は、光学系で結像されて撮像手段により撮像される。オートフォーカス手段は、撮像手段により撮像された撮像画像に含まれる顔検出枠21内の顔画像にピントが合うように光学系のフォーカス調整を行う。追尾手段は、顔画像の移動に合わせて顔検出枠21を移動させる。記録手段は、撮像手段の撮像範囲と同じ、又はこれよりも小さい記録範囲の画像をシャッタレリーズに応じて記録媒体に記録する。表示制御手段は、記録範囲の画像をスルー画像としてシースルー表示部16に表示し、追尾対象の顔画像が記録範囲からフレームアウトすることに応答してスルー画像の表示を停止する。
(もっと読む)
追尾装置、追尾方法及びプログラム
【課題】移動物体の速度に関係なく、長時間、より正確に移動体の追尾を行うことを目的とする。
【解決手段】特徴量に対応したパラメータに基づいて撮像手段で撮像された画像中の動体を検出する物体検出手段と、カメラの姿勢を制御する姿勢制御手段と、動体の速度に応じて物体検出手段のパラメータを動的に変更する制御手段と、を有することによって課題を解決する。
(もっと読む)
撮像装置およびその制御方法
【課題】サブ撮像素子を用いて測光と被写体探索とを行う場合に、測光に対するダイナミックレンジの拡大と被写体探索の精度維持とを両立する。
【解決手段】撮像装置201は、撮影光学系からの光により形成された光学像をそれぞれ光電変換する第1の撮像素子211および第2の撮像素子208と、第1の撮像素子からの出力を用いて表示および記録用の第1の画像を生成する撮像系303と、第2の撮像素子からの出力を用いて第2の画像を生成し、該第2の画像を用いて測光および被写体探索を行う検出系303とを有する。検出系は、測光において第2の撮像素子からの出力の画素加算を行うか否かの選択が可能であり、該画素加算を行わないときは被写体探索を行い、画素加算を行うときは被写体探索を制限する。
(もっと読む)
画像表示装置及び画像表示方法
【課題】全周囲画像のように、混雑領域と、非混雑領域と、が混在する可能性がある撮像画像において、安定した見易い検出枠及び切出画像を得ることができる画像表示装置を提供すること。
【解決手段】混雑領域検出部102は、撮像画像の動き領域を検出することで、撮像画像から混雑領域を検出する。物体検出部103は、パターンマッチングを行うことで、撮像画像からターゲットの画像を検出する。検出枠形成部110は、混雑領域検出部102によって検出された混雑領域を囲む混雑領域枠と物体検出部103によって検出されたターゲットの画像を囲む物体検出枠とを形成する。
(もっと読む)
焦点調節装置および撮像装置
【課題】光学系の焦点状態を適切に検出することが可能な焦点調節装置を提供する。
【解決手段】撮影画面内の第1領域の焦点状態を、光学系による像面のずれ量に基づいて検出する位相差検出部21と、第1領域および第1領域の周囲に位置する撮影画面内の第2領域の焦点状態を、光学系による像のコントラストに関する評価値に基づいて検出するコントラスト検出部21と、撮像画像から対象とする像に相当する基準画像に対応する画像を繰り返し認識することで、撮影画面内の追尾対象の位置を追尾する追尾部21と、追尾対象の位置に基づいて焦点検出エリアを設定する焦点検出エリア設定部21と、焦点検出エリアが第1領域に存在する場合には、位相差検出部21およびコントラスト検出部21のうち少なくとも一方に焦点検出を行わせ、焦点検出エリアが第2領域に存在する場合には、コントラスト検出部21に焦点検出を行わせる制御部21と、を備える。
(もっと読む)
カメラ、カメラ制御プログラム及び撮影方法
【課題】撮影条件が自動設定される確率を高め、かつ人物以外を主要被写体として撮影条件を自動設定することを可能にする。
【解決手段】被写体検索モードが設定されている場合には、ライブビュー画像を取得する(ステップS204)。現在の位置、レンズ方向に対応して被写体データ管理テーブルから被写体特徴を抽出する(ステップS205)。この抽出した被写体特徴情報に合致する被写体部分をライブビュー画像内より検索する(ステップS206)。そして、ライブビュー画像内に特徴情報と合致した被写体部分が存在する否かを判断する(ステップS207)。ライブビュー画像内に特徴情報と合致した被写体部分が存在する場合には、合致した被写体部分をメイン被写体として、AF、AE、画角調整等を実行する(ステップS208)。
(もっと読む)
撮像装置
【構成】ディジタルカメラ10はイメージセンサ12を含み、イメージセンサ12は被写界の光学像を繰り返し捉える。イメージセンサ12によって作成された被写界像のうちズームエリア(E)に属する部分被写界像には、ズーム回路16によるズーム処理が施される。これにより作成されたズーム被写界像は、LCDドライバ34によってLCDモニタ36のモニタ画面(36s)に表示される。CPU20は、作成された被写界像から顔検出回路22を通じて顔画像を検出し(S7,S29)、検出された顔画像のズームエリア(E)に対する位置を示す位置情報をCG28およびLCDドライバ34を通じてモニタ画面(36s)内のミニ画面(MS1)に表示する(S45〜S61)。
【効果】顔画像をズームエリア内にスムーズに導入できる。
(もっと読む)
画像処理装置及びその制御方法
【課題】 レンズの周辺光量落ちの影響が被写体の追尾結果に与える影響を低減し、精度のよい被写体追尾を実現する画像処理装置及びその制御方法を提供する。
【解決手段】 基準画像と、比較先画像における探索領域を構成する複数の部分画像との相関度に基づいて、比較先画像での被写体領域を探索して被写体追尾を行う。基準画像と部分画像との相関度を算出する前に、基準画像と部分画像における、画素の最大輝度値が予め定められた同一の輝度値となるように、各画素の輝度値を補正する。
(もっと読む)
撮像装置及び制御方法
【課題】 露出制御に用いるデータに基づいて被写体追尾を行う場合に、精度よく被写体追尾を行うことができるようにする。
【解決手段】 撮像した被写体像に応じた信号を出力する撮像素子と、前記撮像素子から出力された信号に基づく画像データを用いて露出制御を行う露出制御手段と、前記露出制御に用いる複数の画像データを用いて所定の条件を満たす対象の追尾を行う追尾手段と、前記追尾に用いる複数の画像データのそれぞれの輝度に関する値が近づくように補正を行う補正手段と、を有し、前記追尾手段は、前記補正が行われた場合、補正した結果に基づいて前記追尾を行う。
(もっと読む)
41 - 60 / 780
[ Back to top ]