
Fターム[5C122EA65]の内容
Fターム[5C122EA65]に分類される特許
101 - 120 / 780
撮像装置及びその制御方法、並びにプログラム
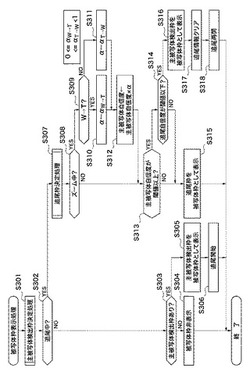
【課題】画角が変化している場合でも主被写体を精度よく決定することが出来る撮像装置を提供する。
【解決手段】撮像装置100は、画角に依存する情報を用いて主被写体可能性を示す第1評価値を算出して第1主被写体候補を決定し、画角に依存しない情報を用いて前記主被写体可能性を示す第2評価値を算出して第2主被写体候補を決定し、第1評価値と第2評価値とを比較して、主被写体可能性が高い方の評価値に対応する主被写体候補を主被写体として決定するものであって、画角が変更されている場合は、変更されていない場合に比較して、第1評価値に対する第2評価値を優先して用いて主被写体を決定する。
(もっと読む)
情報処理装置、情報処理方法及びプログラム

【課題】動き予測部のような特別な構成を追加することなく、対象物体の動きによらず、対象物体を正確に、また安定して捉える。
【解決手段】低解像度ROI決定部1222は、前の時点に撮像された画像データに基づいて、次の時点に撮像される低解像度画像データの注目領域である第1の注目領域を決定する。画像入力部121は、上記低解像度画像データのうち、第1の注目領域に該当する低解像度画像データをカメラ11から取得する。高解像度ROI決定部1223は、第1の注目領域に該当する低解像度画像データに基づいて、次の時点に撮像される高解像度画像データの注目領域である第2の注目領域を決定する。
(もっと読む)
撮像装置及びプログラム
【課題】動画撮影の撮影方向に関わらずに集音の指向性を制御できるようにする。
【解決手段】制御部1は、動画撮影時にマイク8で集音する場合に、その集音対象の音源が設定されている状態であれば、その設定音源に向かうように集音の指向性を制御する。この場合、集音対象の音源を設定する際に姿勢検出部11により検出されたカメラの姿勢を設定しておき、カメラの姿勢が変化した際に、制御部1は、カメラの姿勢の変化量に応じて集音の指向性を制御する。
(もっと読む)
全周警戒システム
【課題】高解像度カメラの台数に関係なく全ての対象を追尾可能な全周警戒システムを提供するにある。
【解決手段】走行車100に搭載された全周囲センサ50により全周囲を走査して全周囲センサ画像を取得し、全周囲センサ画像中の全ての対象を追尾し、全周囲センサ画像中の対象から操作者が高解像度カメラにより撮影を意図する1又は2以上の撮影対象a,b,…を選択すると、選択された撮影対象a,b,…の三次元位置に基づいて、走行車100に搭載された複数台の高解像度カメラ11,12,13,…のうち撮影対象a,b,…に対して最も近い距離にあるものを当該撮影対象a,b,…にカメラ割当器30にて割り当てるので、走行車100と撮影対象a,b,…との相対的位置の変化に対応して、高解像度カメラ11,12,13,…を切り替えながら撮影対象a,b,…を高解像度カメラにより撮影し続けることができる。
(もっと読む)
電子カメラ
【課題】 追尾対象である被写体の詳細をより迅速かつ簡単に確認可能とすること。
【解決手段】 被写体像を撮像して画像を生成する撮像部と、撮像部により生成した画像に基づいて、撮像部による撮像時の焦点検出対象領域を継続的に選択する選択部と、撮像部により生成した画像を表示可能な表示部と、撮像部により生成した画像から焦点検出対象領域に対応する部分を切り出して追尾対象確認用画像を生成する生成部と、撮像部による撮像時に、撮像部により生成した画像に基づく構図確認用のスルー画像と、追尾対象確認用画像とを重畳して表示部に表示する制御部とを備える。
(もっと読む)
被写体検出手段を有する撮像装置
【課題】被写体検出の応答性を維持しつつ、検出画角の制約がなく、被写体が大きくなった場合においても被写体検出精度の高いシステムを提供することを目的とする。
【解決手段】デジタルカメラ、デジタルビデオカメラのように撮像手段から入力された映像、あるいは音声入力手段から入力された音声情報を該デジタルカメラ、デジタルビデオカメラの有する記録媒体に記録し、該記録媒体に記録された映像、音声情報を記録媒体から読み出し、再生することができ、更に被写体を検出する手段を有する撮像装置において、撮像素子から所望の画素データを先読みする手段を有し、画像データを構成するための画素を、第1グループと第2グループに分け、第1グループから先に撮像手段から読み出し、第1グループを読み出した後に、第2グループを読み出す手段を有することを特徴とする。
(もっと読む)
電子カメラ
【課題】 本発明は、画像処理用のパラメータを設定するまでの処理時間の高速化を図る電子カメラを提供する。
【解決手段】 電子カメラは、第1撮像部と、第2撮像部と、解析部と、設定部と、画像処理部とを備える。第1撮像部は、撮像光学系の光軸に沿った第1光路からの光束を撮像し、第1画像を生成する。第2撮像部は、第1撮像部の撮像待機時に第1光路と異なる第2光路が設定されることにより、第2光路からの光束を撮像し、第2画像を生成する。解析部は、第2画像を解析する。設定部は、解析部の解析結果に基づいて、第1画像の画像処理用のパラメータを設定する。画像処理部は、パラメータに基づいて、第1画像の画像処理を行なう。
(もっと読む)
画像処理装置及びその制御方法、及びプログラム
【課題】所望の被写体が主被写体として判定されるまでに要する時間を短縮する。
【解決手段】連続して撮像された画像のそれぞれについて、当該画像を複数のブロックに分割し、各ブロックの信号値を基に画像の色成分に係るヒストグラムを生成する。そして、生成されたヒストグラムを複数の区間に分割し、画像の複数のブロックを、信号値が同一の区間に属し、かつ隣接しているブロックが1つの領域となるように、画像について領域を設定する。さらに領域のそれぞれについて評価値を算出し、最も高い評価値と当該評価値の次に高い評価値との差分を用いて算出された判定値が予め定められた閾値を超える場合に、最も高い評価値を有する領域の追尾を行うと判断する。
(もっと読む)
撮像装置
【課題】特に夜間撮影時などにおいて(表示画面では人物等を認識し難いときにおいて)、ユーザによる被写体の認識等を支援する。
【解決手段】複数のマイクロホンの出力音響信号に基づき音源として機能する被写体SUB1を検出し、検出被写体SUB1を追尾対象に設定した上で画像信号に基づく追尾処理を実行する。表示画面には、被写体SUB1の動画像が表示されると共に、追尾対象の位置を指し示す追尾対象枠Fi及び追尾対象の音量を示す音量アイコンICiが表示される。
(もっと読む)
物体追尾装置、物体追尾方法、及び物体追尾プログラム
【課題】追尾対象である被写体などの物体の状態(形状)が変化した場合においても、精度よく被写体の追尾を行う。
【解決手段】物体追尾装置は、複数のフレーム画像を有する画像信号を受けて、当該画像信号において特定の物体を追尾する。小領域設定部104は現フレーム画像よりも前の前フレーム画像において物体の領域を示す物体領域に予め設定された数の小領域を設定する。動きベクトル検出部105は小領域の各々において物体について動きベクトルを検出し、形状変化判断部106は動きベクトルに応じて物体の変化を判断して形状変化情報を得る。領域補正部107は形状変化情報に応じて物体領域の位置及びサイズを補正して補正物体領域とする。そして、追尾部102は補正物体領域によって物体の追尾を行う。
(もっと読む)
被写体追尾カメラシステム
【課題】 一台目のカメラで撮影した被写体に対し、2台目の撮影者が被写体の情報を正確に把握していなかった場合や、被写体の動作がすばやい時など、被写体を見失う、フォーカスや撮影条件を設定するのに手間取る、などにより撮影機会を逸することがあった。
そこで、本発明の目的は、二台目以降のカメラでAFなどの撮影操作により撮影機会を逸しない方法を提案することである。
【解決手段】 最初に撮影したカメラAはピントを合わせた主被写体に対して被写体追尾手段によって被写体認識情報を取得した後、撮影を行うと、カメラAは情報共有手段によってカメラBに被写体認識情報を送信する。カメラBは被写体認識情報を受信した後、撮影可能範囲内に被写体認識した主被写体が現れた場合、自動的にサーボAFすること特徴とする構成とした。
(もっと読む)
被写体検出装置、被写体検出方法及びプログラム
【課題】動きのある被写体であってもフレーム画像から被写体画像を精度良く検出する。
【解決手段】画像表示装置100であって、被写体検出部5bにより夫々検出された被写体画像の中から、所定フレーム数の被写体画像のデータをまとめることにより、所定フレーム数の被写体画像を代表する代表画像データを生成する代表画像生成部5cと、代表画像データの生成に用いられた一の被写体画像のデータの当該代表画像データに対する変化の度合いを算出する変化度合算出部5eと、算出された変化の度合いに基づいて、代表画像生成部による代表画像データの生成に用いられる被写体画像のデータのフレーム数を制御するフレーム数制御部5gと、を備えている。
(もっと読む)
検出装置
【課題】対象者を、継続して、高精度に検出することが可能な検出装置を提供することを目的とする。
【解決手段】本発明の検出装置は、第1方向から対象者を含む画像を撮像する第1の撮像部と、前記第1方向から前記対象者を含む画像を撮像する、前記第1の撮像部とは異なる第2の撮像部と、前記撮像部の撮像した画像から前記対象者の像の大きさを検出する検出部と、を備え、前記第1の撮像部の撮像領域の一部と、前記第2の撮像部の撮像領域の一部とが重複している検出装置である。
(もっと読む)
監視システム及び監視装置
【課題】監視エリアへの侵入者を自動追跡して撮影可能であるとともに、複数の侵入者が同時に侵入した場合であっても、当該複数の侵入者を漏れなく撮影することが可能な、監視システムを得る。
【解決手段】監視システム5は、監視装置3と表示装置6とを備え、監視装置3は、所定の監視エリア4を撮影する広角カメラ11A,11Bと、広角カメラ11A,11Bによって撮影された撮影画像内に移動物体が含まれている場合に、当該移動物体を自動追跡して撮影することにより、当該移動物体の拡大画像300を取得して表示装置6に表示する望遠カメラ12Aと、オペレータによって遠隔操作されることにより、広角カメラ11A,11B及び望遠カメラ12Aとは独立して、監視エリア4内の所望箇所の画像を取得して表示装置6に表示可能な望遠カメラ12Bと、を有する。
(もっと読む)
移動体監視装置
【課題】 比較的簡単なアルゴリズムを用いて、ズーム倍率を制御することにより、移動する被写体までの距離によらず、被写体の撮影画像中における大きさを所望の大きさに略一致させることを目的とする。
【解決手段】 略水平に移動する被写体3を撮影する撮像素子10と、指定されたチルト角αに基づいて、撮影軸2をチルト回動させる回転駆動部14と、チルト角α及びズーム係数Pに基づいて、ズーム倍率を求めるズーム倍率算出部15と、任意の上記チルト角に対応する上記ズーム倍率を推奨倍率として教示するための推奨倍率教示部18と、少なくとも1組の上記チルト角α及び上記推奨倍率に基づいて、ズーム係数Pを求めるズーム係数決定部17とを備えることにより、チルト角αによらず、撮影画像中における被写体3の大きさを推奨倍率教示部18による教示時の大きさに略一致させることができる。
(もっと読む)
映像処理装置および方法
【課題】 監視カメラの映像では被写体の顔や人体としての特徴が検出しやすい方向に映るとは限らず、適切な追尾結果が得られるとは限らない。
【解決手段】 映像処理装置100は、映像から物体を検出する物体検出部102と、検出した物体を追尾する物体追尾部103と、軌跡管理部106と、映像から人体を検出する人体検出部104と、物体対応付部105とを有する。軌跡管理部106は、追尾した物体の軌跡を管理する。物体対応付部105は、物体検出部102により検出した物体と人体検出部104により検出した人体とを対応付け、軌跡管理部106は、追尾した物体が物体対応付部105により人体に対応付けられたことを管理する。
(もっと読む)
撮影装置
【課題】 被写体認識像の取り込み領域を広げる事が出来ると共に被写体形状認識精度が向上して、動体追尾撮影や顔認識撮影を精度良く行える撮影装置を達成する。
【解決手段】 撮影光学系を介し焦点板に投影された被写体像の情報を取得する被写体像取得手段と前記焦点板に隣接配置され表示輝度の制御が可能な情報表示手段とで構成されるファインダー光学系を有する撮影装置において、前記被写体像収得手段と情報表示手段の同期制御を行う同期制御手段、及び前記被写体像取得手段より得られる複数の被写体像情報を合成する合成手段を設ける。
(もっと読む)
動画追尾装置、動画追尾方法および動画追尾プログラム
【課題】線上での追尾点の動きを容易に把握することができるとともに、動画中での任意の時点の追尾点の状態を容易に観察することが可能な動画追尾装置、動画追尾方法および動画追尾プログラムを提供する。
【解決手段】複数フレームの画像データに基づいて表示部20の画像表示領域Taに画像が表示される。画像表示領域Taの画像内で追尾点および追尾線が設定されると、設定された追尾線上での追尾点の位置を識別する追尾動作が各フレームの画像において実行される。また、複数フレームの画像における追尾動作により識別された追尾点の位置の時間変化を示す追尾結果時間変化線が表示部20の画像表示領域Tbに表示される。画像表示領域Tbに表示される追尾結果時間変化線の時間軸方向の位置が現在表示位置バーLにより指定されると、指定された位置に対応するフレームの画像が画像表示領域Taに表示される。
(もっと読む)
画像認識装置、及び、画像認識方法
【課題】画像認識装置において、ユーザの負担を増加させずに車外画像に基づいて対象物を認識する機能を適切に発揮できる技術を提供する。
【解決手段】画像認識装置は、車載カメラが撮影した車外画像中の対象領域に基づいて対象物を認識する。そして、画像認識装置は、カメラの光軸の位置の変化量に応じてその対象領域を変更する。このため、画像認識装置は、対象物の認識性能を向上させることができる。また、ユーザはカメラの光軸の位置がズレてもカメラの光軸を調整する必要がない。
(もっと読む)
撮影装置
【課題】精度の高い天体追尾演算と追従性の高い天体追尾とを両立するのに好適な撮影装置を提供すること。
【解決手段】撮影装置を、撮像面上の被写体の像を撮像する固体撮像素子と、撮像面への露光開始を指示入力するレリーズスイッチと、指示入力によって所定時間のカウントを開始する計時手段と、像が撮像面上を移動する予定移動軌跡を所定時間中に予め演算する移動軌跡演算手段と、所定時間経過後に露光を開始する露光開始手段と、演算された予定移動軌跡に基づいて撮像面上での像の露光中の移動が静止するように補正する像補正手段とから構成した。
(もっと読む)
101 - 120 / 780
[ Back to top ]