
Fターム[5C122FH04]の内容
Fターム[5C122FH04]に分類される特許
101 - 120 / 1,114
画像処理装置および画像処理システム
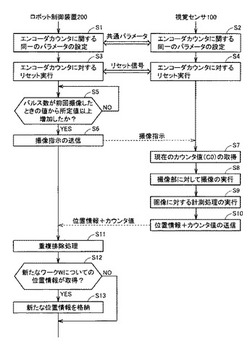
【課題】撮像装置に対する撮像指示を発生してから実際に撮像が行われるまでにタイムラグが存在する場合であっても、正確にトラッキング処理を行うことのできる視覚センサを提供する。
【解決手段】画像処理装置は、搬送装置の搬送経路における移動量を示す信号を受付けるインターフェイスと、搬送経路において撮像部の撮像範囲より下流側に配置されるとともにワークを取り扱う移動機械、を制御するための制御装置と通信するためのインターフェイスと、撮像部の撮像によって得られた画像に対して計測処理を行うことで、画像中の予め登録されたワークに対応する領域の位置情報を取得する手段と、制御装置との間で搬送経路における移動量を同期して保持する手段と、撮像指示に応答して撮像部による撮像を開始する手段と、位置情報と当該位置情報の取得に用いた画像を撮像したときの移動量とを制御装置へ送信する手段とを含む。
(もっと読む)
適応フィルタリングを利用したデジタルイメージ安定化方法

【課題】補償ウィンドウオーバーエクスカーションのヒストリー(history)に基づいてビデオフレームの場面で止められた/背景客体を代表する主要(principal)変換/補償変換P(n)を適応的にフィルタリングする段階を含むデジタルイメージ安定化方法を提供する。
【解決手段】デジタルイメージ安定化方法ビデオは、タイルモーションベクトル(Tile MV)グループの複数の変換のそれぞれと特徴点モーションベクトル(FP MV)グループのそれぞれとのスコアリングに基づいて、フレームの場面内の停止/背景客体を表わす主要変換を選択する段階と、停止(背景)グループのヒストリーと複数のモーションベクトルグループのそれぞれのヒストリーとに基づいて大型移動客体を除外させる段階と、を含む。
(もっと読む)
撮影システム、撮影方法、及び撮影プログラム
【課題】所定の方向を撮影可能な角度で、車両の外界を撮影可能な位置に撮影端末が設置されたか否かを自動的に判断することができる、撮影システムを提供すること。
【解決手段】撮影システム1は、車両2の進行方向を特定する車両方向特定部13bと、車両2に着脱自在に設置される撮影端末20の撮影方向を特定する撮影方向特定部24aと、撮影端末20による画像の撮影位置を特定する撮影位置特定部24bと、車両2の進行方向と撮影端末20の撮影方向とに基づき、所定の方向を撮影可能な角度で撮影端末20が設置されたか否かを判定する設置判定部24dと、設置判定部24dにより、所定の方向を撮影可能な角度で撮影端末20が設置されたと判定された場合、当該撮影端末20により撮影された画像と撮影位置特定部24bにより特定された当該画像の撮影位置とを相互に関連付けた画像情報を送信する画像情報送信部24cとを備える。
(もっと読む)
画像処理装置、撮影装置および画像処理プログラム
【課題】簡単な構成で立体視画像を得ること。
【解決手段】画像処理装置1は、画像を再生表示する表示手段15と、続けて撮影された複数コマの画像の各特徴量に基づいて、複数コマの画像を組合わせて1枚の画像を合成する画像合成手段16と、画像合成手段16で合成された画像を表示手段15に再生表示させる表示制御手段16と、再生表示中の合成画像のうち所定領域を選択するための操作部材20と、操作部材20からの選択操作信号が示す領域をそれぞれ含む2コマの画像であって、所定の基線長に対応する2画像を複数コマの画像の中から抽出する画像抽出手段16と、を備える。
(もっと読む)
デジタルイメージ安定化のために回転、補間され最適化されたピクセルのラスター出力
【課題】隣接したタイルの間でソースフレームアクセスをオーバーラッピングせずに、イメージの回転を行うことができるピクセル補間方法、デジタルイメージ安定化装置を提供する。
【解決手段】回転動き成分を含む主要変換をソースフレームに適用し、ラスター順序によって目標フレームの全体行のそれぞれのピクセルのイメージデータを補間して出力する。第1段階は、主要変換係数に基づいて、目標フレームの全体の行のピクセルに対応するソースフレームデータの対角線方向に指向されたメタ行を識別する。第2段階は、マルチラインバッファのようなメモリバッファの1つの行内にソースフレームデータのそれぞれのメタ行を保存することによって、目標フレームの全体の行のピクセルに対応するメタ行のソースフレームデータを水平化する。ムービング・ウィンドウ補間段階は、主要変換係数に基づいて順次に補間し、目標フレームの全体の行のイメージデータを出力する。
(もっと読む)
撮像装置、および撮像装置制御方法、並びにプログラム
【課題】異なる視点からの撮影画像の上下方向のズレを解消する変換パラメータを高精度かつ効率的に算出する構成を実現する。
【解決手段】例えば3次元画像としてのLR画像等、異なる視点からの撮影画像に対するブロックマッチング等の画像解析により特徴点検出を実行し、特徴点情報を利用して画像の上下方向のズレを解消する画像変換パラメータを算出する。変換パラメータ算出処理に際して、撮像部のズームレンズを望遠端に設定した位置を初期位置として、該初期位置での撮影画像に基づく特徴点情報を入力して画像変換パラメータの信頼度を算出し、信頼度を表示部に表示する。さらに望遠端での信頼度が閾値以上である場合にズーム位置を広角側に順次移動させて複数ポイントで変換パラメータを算出する。
(もっと読む)
撮像装置および動きベクトル検出方法
【課題】ローリングシャッタ法を用いて撮影された画像から検出される動きベクトルの垂直方向の誤差を補正することができる撮像装置および動きベクトル検出方法を提供する。
【解決手段】カメラ11は、行列に配置された撮像素子を有し、上端の行から下端の行に向かって隣接する行間のシャッタ時間が所定のずれ時間を有するXYアドレス読み出し法により撮像素子の信号を取り出すことにより所定のフレーム周期でフレーム画像を得る。動きベクトル検出部13は、時間的に連続する2枚のフレーム画像に含まれる対象物について、2枚のフレーム画像間における対象物の行方向および列方向の移動量を検出する。動きベクトル垂直成分補正部14は、動きベクトル検出部13により検出された移動量の列方向成分を所定のずれ時間およびフレーム周期の少なくとも一方を用いて補正し、移動量の行方向成分および補正後の列方向成分を出力する。
(もっと読む)
画像処理装置
【課題】HMD12と一緒に観察者の頭部に装着されるカメラ21によって現実外界内の対象物が撮像されたカメラ画像をモニタ装置130が観察者とは別の者に対して表示する場合に、前記対象物が適切にモニタ装置130によって表示されるように、前記カメラ画像に対して画像処理を行う。
【解決手段】観察者の頭部の、重力方向に対する傾き角を検出し、カメラ画像の、重力方向に対する傾きを、前記検出された傾き角の向きとは逆向きに、かつ、実質的に同じ角度で補正する画像傾き補正を行う。その画像傾き補正が行われたカメラ画像をモニタ画像としてモニタ装置130の画面150上に表示する。
(もっと読む)
写真撮影遊戯機、写真撮影遊戯方法及び制御プログラム
【課題】カスタマイズされたコラージュ合成画像を生成できる、写真撮影遊戯機を提供する。
【解決手段】写真撮影遊戯機は、カメラとプリンタとを備える。写真撮影遊戯機内のCPUは、カメラを制御して、写真画像650を生成する。CPUはさらに、レイアウト画像830を撮影用ディスプレイに表示し、被写体を含む写真画像820を生成する。CPU103は、レイアウト画像830内の複数の配置領域801に配置する写真画像650の選択を受け付け、選択に応じて配置領域801内に写真画像650を配置して、コラージュ合成画像810を生成する。
(もっと読む)
画像撮影装置及び画像撮影プログラム
【課題】 適切な証明写真用の画像データを生成することである。
【解決手段】画像撮影装置としてのデジタルカメラ1において証明写真を撮影するにあたり、図示しない内蔵の記憶部に記憶されたフォームデータのうちから、入力された証明写真の種類に基づくフォームデータを選択し、オートフォーカスによるフォーカス距離に基づいて撮影レンズ2を含むレンズ光学系を光学ズーム調整し、選択されたフォームデータをスルー画像とともに表示部13に表示させて、当該フォームデータに合せられた人物を撮影して証明写真用の画像データを生成する。
(もっと読む)
電子カメラ、画像処理装置および画像処理プログラム
【課題】
従来は、画像の回転やトリミングを行うために煩雑な操作を行わなければならないという問題があった。
【解決手段】
本発明では、被写体画像を撮影する撮影部と、前記撮影部が撮影した画像を表示するための方形状の表示面を有する表示部と、前記表示部に表示された画像に対して水平または垂直を示す基準軸を設定する基準軸設定部と、前記表示部に表示された画像の回転方向を指示する回転方向指示部と、前記基準軸が前記表示部の方形状の表示面の辺に対して水平または垂直になるように前記画像を前記回転方向に回転させる画像回転部とを有することを特徴とする。
(もっと読む)
画像合成装置及びプログラム
【課題】処理時間の浪費の防止を図るとともに、合成精度や画像品質の低下を抑制する。
【解決手段】撮像装置100であって、複数の画像のうち、何れか一の基準画像と対象画像を合成する画像合成処理と、画像の撮影状況に関連した撮影状況関連情報を特定する処理と、特定された撮影状況に基づいて、前記画像合成処理の内容を設定する処理とを行うCPU71を備える。
(もっと読む)
画像生成装置及び方法
【課題】画素補完処理を施すことなく高解像度な合成画像を簡便に生成する。
【解決手段】多眼カメラは、二次元状に配列している複数の撮影レンズと、各撮影レンズにより結像する被写体像を個別に撮像する撮像素子と、各撮像素子から得られる複数の画像を合成する合成処理部25をもつ。合成処理部25は、相対位置検出部40、重合部41、及び画素配置部42からなる。相対位置検出部40は、ある基準の画像に対する残りの画像との相対位置をそれぞれ検出する。重合部41は、複数の画像を、多画素化した仮想の画像領域上で相対位置に基づくズレがゼロになるように重ね合わせる。画素配置部42は、仮想の画像領域を構成する各画素の中心に、中心が最も近い画素を、重ね合わせた複数の画像の中から選択して配置していくことで単一の合成画像を生成する。
(もっと読む)
画像情報処理装置及び画像情報処理システム
【課題】鑑賞者の直感的な動作により表示部に表示されている画像の表示範囲及び表示サイズを変更する。
【解決手段】画像を表示する表示部42と、鑑賞者の顔の撮像を行う第1撮像部12と、前記第1撮像部から出力された画像データに基づいて前記鑑賞者の顔の位置及び前記鑑賞者の顔のサイズまたは両目の幅を検出する検出部10と、前記検出部により検出された前記鑑賞者の顔のサイズまたは両目の幅に基づいて前記鑑賞者までの距離を算出する算出部10と、前記検出部により検出された前記鑑賞者の顔の位置及び前記算出部により算出された前記鑑賞者までの距離に基づいて前記表示部に表示する前記画像の表示範囲及び表示サイズを変更する表示制御部10とを備える。
(もっと読む)
撮像装置およびその制御方法、印刷システム、並びにプログラム、記憶媒体
【課題】トリミングにより切り出した画像を高精度且つ高速に印刷できる技術を実現する。
【解決手段】設定手段により設定されたトリミング範囲を示すトリミング情報を記憶するトリミング情報記憶手段と、前記設定手段により設定された印刷条件に基づいて、印刷対象の画像にリサイズを含む加工処理を施し、前記トリミング情報記憶手段に記憶されているトリミング情報を前記加工処理に応じて加工する加工手段と、前記加工手段により加工処理された印刷対象の画像、および、加工されたトリミング情報を印刷装置に転送する転送手段と、を有し、前記加工手段によりリサイズを行う場合は、前記加工手段は、前記トリミング情報に応じた画像の切り出しは行わずに、画像全体をリサイズし、前記トリミング情報記憶手段に記憶されているトリミング情報をリサイズする。
(もっと読む)
画像処理装置およびその方法
【課題】撮像装置の振れに起因する画像の暈けを高精度に補正する。
【解決手段】補正処理部100は、撮像データ、動き情報と被写体の距離情報を入力する。初期ベクトル生成部107は、撮像データを画像ベクトルデータに設定し、画像ベクトルデータを用いて基底ベクトルデータを設定する。振れ作用部110は、動き情報と距離情報を用いる射影変換により、基底ベクトルデータに撮像装置の振れを表す振れを与えた振れベクトルデータを生成する。逆振れ作用部111は、振れ作用部110による射影変換と逆変換の関係にある射影変換により、振れベクトルデータに逆振れを与えた振れベクトルデータを生成する。ベクトル更新部108は、振れベクトルデータを用いて、画像ベクトルデータと基底ベクトルデータを更新する。補正処理部100は、終了条件を満たすまで振れベクトルデータの生成、更新を繰り返し、終了条件を満たすと画像ベクトルデータを出力する。
(もっと読む)
撮像装置および撮像方法
【課題】光学像を画像データとして記録するための撮像装置および撮像方法において、解像度やサイズを犠牲にすることなく、撮像時の傾きが補正された画像データを得る。
【解決手段】光学像に対する受光面の相対位置を互いに異ならせた複数の画像を撮像手段により撮像し、受光面の法線周りの受光面のローリング傾き角度を検出し、撮像した複数の画像をと、検出された受光面のローリング傾き角度とに基づき、受光面の傾きを補正した画像に対応する画像データを作成し記録する。
(もっと読む)
画像処理装置
【課題】LUTを用いて画像の歪みを補正する従来の方法よりも必要な記憶容量を少なく抑えつつ、温度変化に対応した歪み補正処理を行うことを課題とする。
【解決手段】係数を変更すれば所定の温度範囲にわたって撮像画像中における歪み補正処理前の画像位置を理想位置へ変換できる多項式からなる歪み補正式の当該係数を、互いに異なる複数の特定温度t1,t2,t3ごとに、補正係数P1,P2,P3として補正係数記憶部22A,22Bに格納しておく。歪み補正処理部25は、温度センサ21A,21Bにより検知した温度に基づいて、その検知温度で撮像画像の歪み度合いを示す指標値(ずれ量)が最も小さくなる補正係数を補正係数記憶部から読み出し、読み出した補正係数を用いて上記歪み補正式により歪み補正処理を行う。
(もっと読む)
画像処理装置、その制御方法およびプログラム
【課題】撮像モードに応じて適切に画像処理を行う。
【解決手段】姿勢検出部130は、撮像装置100の姿勢を検出する。撮像部190は、被写体を撮像してその被写体を含む平面画像またはその被写体を立体視するための立体視画像を生成する。画像変換部172は、撮像部190により生成された画像について縦横変換処理および縮小処理を行うことによりその画像を変換する。制御部174は、立体視画像撮像モードの設定時には、姿勢検出部130により検出された撮像装置100の姿勢にかかわらず立体視画像を記憶部180に記録させる制御を行う。また、制御部174は、平面画像撮像モードの設定時には、姿勢検出部130により検出された撮像装置100の姿勢に基づいて平面画像と画像変換部172により生成された変換画像との何れかを記憶部180に記録させる制御を行う。
(もっと読む)
撮像装置及びプログラム
【課題】ユーザによる煩雑な操作を必要とせず、特別な部品を用意しておく必要もなく、撮影される画像に対する制御を適切に実行できるようにする。
【解決手段】中央制御部11は、カメラ部16で撮影される画像に対する制御をスタイル検出部21で検出されたスタイルに応じて行う。例えば、画像を撮影する際に、現在のスタイルに応じてその撮影条件/撮影モード/を制御したり、撮影された画像を表示するときの表示方向あるいは編集するときの回転方向を制御したりする。
(もっと読む)
101 - 120 / 1,114
[ Back to top ]