
Fターム[5C122FH04]の内容
Fターム[5C122FH04]に分類される特許
61 - 80 / 1,114
カメラキャリブレーション装置
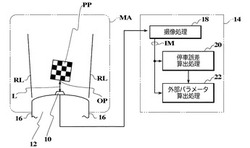
【課題】車両の停車誤差の影響を排除できるキャリブレーションを簡易な設備で実施する。
【解決手段】自車12の形状に対応した2点と交わる線を含み、カメラ10の撮像範囲内に少なくとも2本配置される参照線RLと、この参照線RLの間に予め定められたパターン形状を有する校正用パターンPPとを有する測定領域MAと、画像処理部14とを備えている。そして、画像処理部14が、カメラ10で校正用パターンPP及び参照線RLが配置される測定領域MAを撮影することで前記測定用画像IMを生成する撮像処理18と、前記2本の前記参照線RLに基づいて前記自車12の停車位置と前記パターン形状との座標関係を停車誤差として算出する停車誤差算出処理20と、当該停車誤差をキャンセルした状態で前記パターン形状に基づいて前記カメラ10の取付姿勢に対応する外部パラメータを算出する外部パラメータ算出処理22とを備えた。
(もっと読む)
画像合成装置

【課題】撮影中に被写体が移動しても、生成される動きベクトルの重み付けテーブルを被写体の位置に適正に対応させる。
【解決手段】撮影した複数の画像を位置合わせベクトルに従って位置合わせをして合成するための画像合成装置は、撮影時の予め決められた時点から撮影完了までの経過時間を計測し、複数画像の撮影における被写体領域の情報を取得し、撮影した各画像を複数の領域に分割し、各分割領域の動きベクトルを検出し、経過時間および被写体領域の情報を使用して、各画像から検出された動きベクトルの重み付けを行い、重み付けられた動きベクトルを用いて位置合わせベクトルを算出するよう構成されている。
(もっと読む)
カメラシステムおよび画像生成方法
【課題】被検物が撮像画像上を移動した場合でも、良好な検波処理画像を得ることができるカメラシステムを提供する。
【解決手段】パルス光を被検物に照射する投光手段30と、前記パルス光が照射される領域を含む領域を繰り返し撮像する撮像手段20と、前記撮像手段で撮像された画像の画像信号を記憶する記憶手段40と、前記記憶手段に記憶された画像信号に対して、同期検波処理を行なって、前記投光手段から照射される前記パルス光の点灯消灯のタイミングに同期した検波処理画像を生成する同期検波処理手段と、前記被検物の移動速度を算出する移動速度算出手段と、前記移動速度算出手段により算出された前記被検物の移動速度に基づいて、前記被検物が撮像画像上を移動することにより前記検波処理画像内に発生するノイズ成分を低減するための補正を行なう補正手段と、を備える。
(もっと読む)
カメラ装置の原点ずれ補正方法及びカメラ装置
【課題】 システムに複雑な画像処理機能を搭載しなくても、様々なシーンで利用可能なカメラ装置の原点ずれ補正を実現する。
【解決手段】 カメラ装置のカメラアングルを設定した際に、当該カメラアングルのパラメータとカメラ装置が撮影した映像とを記憶部に保存する。カメラ装置の原点ずれ補正を実行する際に、記憶部に保存されたカメラアングルのパラメータを取得し、カメラ装置の現在のカメラアングルのパラメータを取得する。そして、保存されたパラメータと、現在のパラメータとが一致する場合に、カメラ装置の現在の映像に記憶部に保存された映像を重畳して表示部に表示する。
(もっと読む)
画像処理装置およびその方法
【課題】 第一の解像度を有する複数の画像データから、第一の解像度よりも高い第二の解像度を有する画像データを合成する場合に適切な処理が可能な合成パラメータの設定を可能にする。
【解決手段】 撮像装置100は、撮像部101-125から、複数の視点から撮像して得られた、第一の解像度を有する複数の第一の画像データ、および、撮像における撮像情報を入力する。CPU201は、撮像情報に基づき、第一の画像データから第一の解像度よりも高い第二の解像度を有する第二の画像データを合成するための合成パラメータとして複数の候補値を設定する。CPU201は、複数の候補値から選択された候補値を合成パラメータとして、複数の第一の画像データから第二の画像データを合成する。
(もっと読む)
カメラシステムおよび画像生成方法
【課題】被検物が撮像画像上を移動した場合でも、良好な検波処理画像を得ることができるカメラシステムを提供すること。
【解決手段】所定周期で点灯消灯するパルス光を被検物に照射し、前記パルス光が照射される領域を含む領域を繰り返し撮像し、撮像された画像の画像信号に対して、画素ごとに同期検波処理を行なって、照射される前記パルス光の点灯消灯のタイミングに同期した検波処理画像を生成する際において、撮像画像上における前記被検物の移動速度に基づいて、画像信号の読出し画素位置を変更するとともに、単位画素未満の移動量が検出された場合には、検出した単位画素未満の移動量に基づいて、読出し画素位置を変更した画像信号の信号出力を補正するカメラシステム。
(もっと読む)
AR処理装置、AR処理方法及びプログラム
【課題】手間がかからずに、カメラの位置姿勢を精度よく推定できるAR処理装置を提供する。
【解決手段】生成部12は、同一被写体について取得されたペア画像に基づいて、被写体の3Dモデルを生成する。抽出部13は、被合成3Dモデルから複数の第1特徴点を抽出すると共に、合成3Dモデルから複数の第2特徴点を抽出する。取得部14は、複数の第1特徴点と複数の第2特徴点とに基づいて、座標変換パラメータを取得する。変換部15は、この座標変換パラメータを用いて、合成3Dモデルの座標を被合成3Dモデルの座標系の座標に変換する。合成部16は、変換された全ての合成3Dモデルを被合成3Dモデルに合成すると共に、特徴点の統合を行う。保存部17は、合成された被写体の3Dモデルと、統合された特徴点に関する情報をメモリカード等に保存する。ここで保存されたデータは、AR処理で使用される。
(もっと読む)
撮像装置及びステレオ撮像装置
【課題】撮像素子の傾きによる画像歪を簡易な構成で、且つ、精度良く補正可能な撮像装置及び該撮像装置を複数用いたステレオ撮像装置を提供する。
【解決手段】本発明に係る撮像装置(1)は、撮像素子(3)が撮像光学系(2)の光軸の位置において焦点が合うように配置されており、画像処理手段(4)は撮像素子の傾きθによる撮像画像の歪を、撮像画像の光軸からの距離をA、歪補正後の撮像画像における光軸からの距離をB、及び、撮像光学系の焦点距離をfを用いた演算式による座標変換を用いて補正することを特徴とする。
(もっと読む)
電子機器
【課題】表示装置(又は表示制御部)の機能及び能力に係る制約を意識せずに、被写体の天地方向のずれを補正した撮像画像を表示する。
【解決手段】制御装置1は、被写体を撮像する撮像部10と、撮像時の重力方向を検出するセンサ20と、撮像部10が出力する撮像データから画像を生成する画像生成部40とを備える。画像生成部40は、撮像時の重力方向に基づいて被写体の天地方向を補正した画像を生成する。
(もっと読む)
手ブレ補正装置およびデジタルカメラ
【課題】スペースを節約しつつも大きな手ブレにも高速で対応可能な手ブレ補正機構を得る。
【解決手段】角速度センサ15Lでカメラのロール角を検出する。角速度センサ15X、15Yでカメラのピッチ角、ヨー角を検出する。ピッチ角、ヨー角から撮像センサでの並進ブレ量を算出する。検出されたロール角に基づき手ブレ補正機構16を駆動し、回転ブレを補正する。算出された並進ブレ量に基づき、撮影される画像から並進ブレを補正した領域を切り出しスルー画像としてモニタ13に表示する。
(もっと読む)
電子機器及び表示方法
【課題】電子機器を保持する手が表示画面を覆っている場合であっても、電子機器の姿勢によらずに画像全体が見えるように表示する。
【解決手段】電子機器は、画像を表示する表示部と、前記表示部の表示領域に対する接触の有無及び接触位置を検知する検知部と、前記表示領域において、前記検知部により接触が検知されていない領域に前記画像を当該領域に合わせた大きさで表示させる制御部と、自装置の姿勢を検知する姿勢検知部と、を備え、前記制御部は、前記姿勢検知部により検知された姿勢に基づき、前記画像の表示方向を決定する。
(もっと読む)
撮像装置、立体撮像光学系、およびプログラム
【課題】立体画像を高画質に記録可能な撮像装置を提供する。
【解決手段】撮像装置は、撮像素子と、右視差像及び左視差像をそれぞれ撮像素子の第1の領域及び第1の領域と異なる第2の領域に回転して結像させる第1の撮像光学系と、撮像素子の第1の領域から右視差画像信号を読み出し、かつ第2の領域から左視差画像信号を読み出す画像信号読み出し手段と、撮像素子から読み出された右視差画像信号及び左視差画像信号を回転させる画像加工制御手段と、画像加工制御手段により回転した右視差画像信号及び左視差画像信号を記録媒体に記録する画像記録手段とを有する。
(もっと読む)
撮像装置
【課題】 再度、最初から画像を撮像し直すことなく、確度高くパノラマ画像を生成することができる技術を提供することを目的とする。
【解決手段】 時系列に連続して被写界を撮像し複数の画像を生成する撮像部と、複数の画像を表示する表示部と、複数の画像それぞれを対象画像として時系列順につなぎ合わせて合成画像を生成する画像処理部と、を備え、画像処理部は、対象画像および合成画像の画像特徴量に基づいて、対象画像の合成画像に対する変位量を検出し、変位量に応じて対象画像を合成画像につなぎ合わせ、変位量の検出に失敗した場合、表示部に複数の画像とともに失敗を示す警告を表示する。
(もっと読む)
表示制御装置、方法及びプログラム並びに記録媒体
【課題】
アスペクト比1対1の画像を表示画面が横長か縦長かに応じて適切に表示する。
【構成】
CPU(101)は、表示対象画像のアスペクト比が1:1かどうかを判定する。アスペクト比が1:1で且つ縦画像(ポートレート画像)である場合、CPU(101)は、表示対象画像を縦位置の表示になるように回転制御して、ディスプレイ(105)に表示させる。アスペクト比が1:1でない場合、CPU(101)は、表示対象画像を回転無しでディスプレイ(105)に表示させる。また、アスペクト比が1:1でもなく、縦画像でもない場合、CPU(101)は、表示対象画像を回転制御無しでディスプレイ105に表示させる。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】あおりによる歪みの影響を抑制し、画像データの合成時における画質劣化を抑制する。
【解決手段】画像補正部105は、複数の画像データの位置合わせを行う。あおり角検出部106は、複数の画像データ間におけるあおり角を検出する。合成比率算出部107は、あおり角に基づいて、複数の画像データの合成比率を算出する。画像合成部108は、位置合わせされた複数の画像データを上記合成比率に従って合成する。
(もっと読む)
撮像装置及び画像生成方法
【課題】 簡素な処理で低解像動画から高解像画像を取得できる撮像装置及び画像生成方法等を提供すること。
【解決手段】撮像装置は、画像取得部と、加算画像生成部と、圧縮処理部と、伸張処理部と、推定演算部と、画像出力部を含む。加算画像生成部は、撮像画像fxにおいて加算単位を順次画素シフトさせ、加算単位に含まれる画素値を重み付け加算して加算画像A1〜A4を取得する。圧縮処理部は、加算画像A1〜A4の平均を平均画像Mとして求め、その平均画像Mと、加算画像Amの差分を差分画像Dmとして求め、求めた平均画像Mと差分画像Dmを圧縮する。伸張処理部は、圧縮された平均画像Mと差分画像Dmを伸張して加算画像A1〜A4を求める。推定演算部は、加算画像A1〜A4に基づいて撮像画像fxの画素値vijを推定する。画像出力部は、画素値vijに基づく高解像画像を出力する。
(もっと読む)
撮像装置及び画像生成方法
【課題】簡素な処理で低解像動画から高解像画像を取得できる撮像装置及び画像生成方法等を提供すること。
【解決手段】撮像装置は、画像取得部と、加算画像生成部と、圧縮処理部と、伸張処理部と、推定演算部と、画像出力部を含む。加算画像生成部は、加算単位を順次画素シフトさせながら加算単位に含まれる画素値を重み付け加算して加算画像A1〜A3を取得する。圧縮処理部は、加算画像A2と加算画像A1、A3の差分を、差分画像D1、D3として求め、A2、D1、D3を圧縮する。伸張処理部は、圧縮されたA2、D1、D3を伸張して加算画像A1〜A3を求める。推定演算部は、加算画像A1〜A3に基づいて加算画像A4を補間により求め、求めた加算画像A4と加算画像A1〜A3に基づいて撮像画像fxの画素値vijを推定する。画像出力部は、推定された画素値vijに基づく高解像画像を出力する。
(もっと読む)
情報処理装置およびプログラム
【課題】複数のカメラの画像を用いて、一定の大きさの開口を持つ光学系からなる仮想カメラで撮像したかのような画像を合成する場合、各カメラの向きと画角を最適に制御することで、制御を行わない場合に比べて画質を向上させること。
【解決手段】撮像素子共役面602と入射瞳606とを通るように各カメラを制御することで、効率よく光線情報を取得できる。実際の多眼カメラは、アレイ上に並んでおり三次元的に向きを変えるため、射瞳606と撮像素子共役面602とを制御情報を求めたいカメラに透視投影して得られる形状の共通部分を求め、これを覆うことができる最小の画角を評価値として算出し、算出された評価値が小さくなるようカメラの回転量を最適化することで制御情報を求めれば良い。
(もっと読む)
電子カメラ
【構成】光学/撮像系12Lは、視野VF_Lを捉える撮像面を有し、視野VF_Lを表すL側生画像データを出力する。光学/撮像系12Rは、視野VF_Rを捉える撮像面を有し、視野VF_Rを表すR側生画像データを出力する。ここで、視野VF_LおよびVF_Rは部分的に共通し、L側生画像データおよびR側生画像データは選択的に出力される。CPU34は、光学/撮像系12Lおよび12Rの撮像条件を、L側画像データおよびR側生画像データと重み付け係数WcrntおよびWprvとに基づいて共通的に調整する。CPU34はまた、現フレームの生画像データがL側生画像データおよびR側生画像データのいずれであるかを識別して重み付け係数WcrntおよびWprvの値を変更する。
【効果】撮像性能を高めることができる。
(もっと読む)
表示制御装置及び表示制御方法、プログラム、並びに記憶媒体
【課題】特定の撮影モードで撮影された画像が、ユーザの意図と反した向きで表示される可能性を低減する表示制御技術を実現する。
【解決手段】表示制御装置は、記録媒体から画像データとその属性情報を読み出す読み出し手段と、前記読み出し手段により読み出した属性情報から、読み出した画像データが特定の撮影モードで撮影されたか否かを判定する判定手段と、前記読み出した画像データが前記判定手段により前記特定の撮影モード以外の撮影モードで撮影されたと判定されると、前記読み出した画像データの属性情報に含まれる撮影時の姿勢情報を反映して画像を表示し、前記特定の撮影モードで撮影されたと判定されると、前記姿勢情報を反映せずに画像を表示するように制御する表示制御手段と、を有する。
(もっと読む)
61 - 80 / 1,114
[ Back to top ]